一种基于多传感器的红绿灯时长动态调节方法、系统及介质与流程
- 国知局
- 2024-07-31 20:37:53
本发明涉及多传感器感知,尤其是涉及一种基于多传感器的红绿灯时长动态调节方法、系统及介质。
背景技术:
1、车路协同作为新一代智能交通系统的核心,可以为智能车辆共享道路信息,弥补单车感知局限,但是车路协同感知系统通常将传感器安装在道路边杆上,只能针对固定道路进行检测,部署使用不够灵活。并且在数据发送过程中,红绿灯信号依旧采用传统固定时长的方式对车道通行时间进行控制,没有充分利用感知信息进行动态调节,导致智能车辆即使掌握路口情况,依然受制于红绿灯固定切换时间,难以提高道路通行效率。
2、现有技术中,专利(申请号:202222927919.8)公开了一种可移动式红绿灯,包括底座,所述底座顶端的中部固定安装有支撑箱,所述底座顶部的中部固定安装有位于支撑箱内部支撑柱,所述支撑柱内壁的顶部活动安装有活动柱,所述支撑柱两侧的外表面均开设有活动槽,所述活动柱两侧的底端均固定安装有位于活动槽内壁的活动块,所述活动块的外端穿过活动槽并延伸支撑箱外侧的内壁,所述底座的内部固定安装有位于支撑柱右下方的驱动电机,所述驱动电机输出轴的另一端固定套接有丝杠,所述丝杠的顶端依次贯穿底座、支撑箱和活动块并延伸至支撑箱顶端的内壁且与支撑箱顶端的内壁活动套接,所述丝杠的外表面与活动块的内壁螺纹套接,所述底座的顶端固定安装有位于支撑柱左侧的限位杆,所述限位杆的顶端贯穿活动块并延伸至支撑箱顶端的内壁。但是该专利中无多源传感器感知模块,不能够对红绿灯的时长进行动态调节,导致交通堵塞的情况的发生。
技术实现思路
1、鉴于以上现有技术的不足,本发明提供了一种基于多传感器的红绿灯时长动态调节方法、系统及介质,不仅有效降低路况信息的时延,提高了决策的准确性和实用性,而且能够根据多源感知数据,自适应智能调节红绿灯闪亮时间和通行方向,从而缓解交通拥堵。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于多传感器的红绿灯时长动态调节方法,所述方法包括:
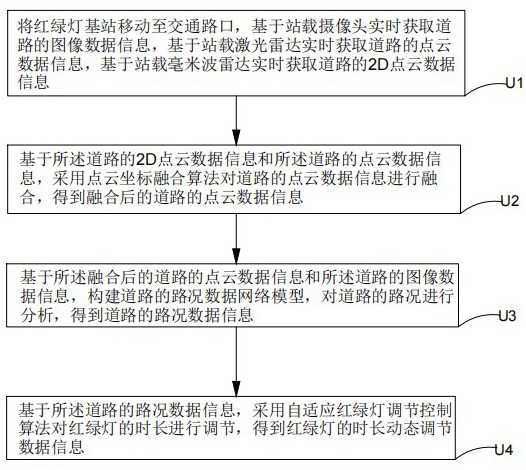
4、u1.将红绿灯基站移动至交通路口,基于站载摄像头实时获取道路的图像数据信息,基于站载激光雷达实时获取道路的点云数据信息,基于站载毫米波雷达实时获取道路的2d点云数据信息;
5、u2.基于所述道路的2d点云数据信息和所述道路的点云数据信息,采用点云坐标融合算法对道路的点云数据信息进行融合,得到融合后的道路的点云数据信息;
6、u3.基于所述融合后的道路的点云数据信息和所述道路的图像数据信息,构建道路的路况数据网络模型,对道路的路况进行分析,得到道路的路况数据信息;
7、u4.基于所述道路的路况数据信息,采用自适应红绿灯调节控制算法对红绿灯的时长进行调节,得到红绿灯的时长动态调节数据信息。
8、进一步的,在步骤u2中,所述采用点云坐标融合算法对道路的点云数据信息进行融合包括:
9、u21.将所述道路的2d点云数据信息投影至所述道路的点云数据信息,建立点云的空间坐标调整函数f(a,b),
10、
11、其中,(a,b)为道路的2d点云坐标,(x,y,z)为道路点云坐标,α1、α2和α3为点云坐标对齐调整因子,对道路的2d点云数据信息进行调整,得到调整后的道路的2d点云数据信息;
12、u22.基于所述调整后的道路的2d点云数据信息和所述道路的点云数据信息,建立点云融合函数xf,
13、
14、
15、其中,xl(k,j)为激光雷达在第k帧的点j的点云数据信息,xlm(k,j)为毫米波雷达在第k帧的点i的点云数据信息,el为激光雷达的测量误差,em为毫米波雷达的测量误差;
16、u23.基于所述点云融合函数xf,对道路的点云数据信息进行融合,得到融合后的道路的点云数据信息。
17、进一步的,所述点云坐标对齐调整因子α1、α2和α3的约束条件为,
18、
19、进一步的,在步骤u3中,所述构建道路的路况数据网络模型,对道路的路况进行分析包括:
20、u31.基于所述道路的图像数据信息和所述融合后的道路的点云数据信息,进行时间戳标定并进行对齐处理,得到对齐处理后的道路的图像数据信息和对齐处理后的融合后的道路的点云数据信息;
21、u32.将所述对齐处理后的道路的图像数据信息投影至所述对齐处理后的融合后的道路的点云数据信息,得到道路图像和点云的综合数据信息;
22、u33.基于所述道路图像和点云的综合数据信息,建立道路的路况函数w,
23、
24、其中,g为道路图像和点云的综合数据信息,λ和ω为道路的路况识别因子,对道路的路况进行分析,得到道路的路况数据信息。
25、进一步的,所述道路的路况识别因子λ和ω为,
26、
27、
28、其中,g为道路图像和点云的综合数据信息。
29、进一步的,在步骤u4中,所述采用自适应红绿灯调节控制算法对红绿灯的时长进行调节包括:
30、u41.基于所述道路的路况数据信息,建立红绿灯的自适应调节控制函数q,
31、
32、其中,t红为红绿灯中红灯所占时长数据信息,t黄为红绿灯中黄灯所占时长数据信息,t绿为红绿灯中绿灯所占时长数据信息,h为道路的路况数据信息,μ1、μ2和μ3为红绿灯的自适应调节因子;
33、u42.基于所述红绿灯的自适应调节控制函数q,对对红绿灯的时长进行调节,得到红绿灯的时长动态调节数据信息。
34、进一步的,所述红绿灯的自适应调节因子μ1、μ2和μ3为,
35、
36、其中,h为道路的路况数据信息。
37、为了实现上述目的及其他相关目的,本发明还提供了一种用于实现任一项所述的基于多传感器的红绿灯时长动态调节方法的系统,所述系统包括:
38、多传感器感知模块,用于获取道路的点云数据信息和图像数据信息;交换机模块,与所述多传感器感知模块连接,用于连接激光雷达、摄像机和毫米波雷达的ip,将三种传感器的传输数据进行整合,隔离冲突域,作为边缘计算单元的输入;
39、边缘计算单元模块,与所述交换机模块连接,作为工控机,通过人工智能算法对多源传感器数据进行处理,完成对检测目标的位置坐标、类别、id、速度、尺寸等信息的处理,以及对红绿灯动态配时的计算,所处理的信息在上位机界面中会显示,并且提供参数调试的界面;车路协同模块,与所述边缘计算单元模块连接,用于路测单元rsu通过5g通讯协议,将边缘计算单元模块处理后的红绿灯信号和多源感知识别结果广播给车载单元和云端,同时,rsu也具备接受车载单元和云端信号数据的能力,反馈给边缘计算单元模块。
40、进一步的,所述多传感器感知模块包括激光雷达单元、摄像机单元和毫米波雷达单元,所述激光雷达单元用于获取道路的点云数据信息,所述摄像机单元模块用于获取道路的图像数据信息,所述毫米波雷达单元用于获取道路的2d点云数据信息。
41、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于多传感器的红绿灯时长动态调节方法的计算机程序。
42、本发明具有以下积极效果:
43、1.本发明通过采用点云坐标融合算法对道路的点云数据信息进行融合,得到融合后的道路的点云数据信息,并结合构建道路的路况数据网络模型,对道路的路况进行分析,得到道路的路况数据信息,不仅通过多源感知数据进行互补,适用于各种复杂路段实现全方位无死角的检测覆盖以及目标属性精准识别,而且根据多源感知数据,自适应智能调节红绿灯闪亮时间和通行方向,从而缓解交通拥堵。
44、2.本发明通过采用自适应红绿灯调节控制算法对红绿灯的时长进行调节,得到红绿灯的时长动态调节数据信息,不仅能够实现各类交通路口的车路协同部署,而且实现对交通参与者、路况、红绿灯信号灯信息的实时共享播报。
45、3.本发明通过多源感知传感器,对红绿灯感知基站进行快速标定和定位,相比固定式车路协同感知套件,方便灵活部署。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187187.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表