一种分体式的雷视融合的系统及方法与流程
- 国知局
- 2024-07-31 20:41:39
本发明涉及交通安全防护,尤其涉及一种分体式的雷视融合的系统及方法。
背景技术:
1、随着智慧交通产业的活跃发展以及国家层面对此产业的宏观支持,在智慧交通领域新的技术的研发及应用得到前所未有的发展,同时为顺应未来交通技术特别是无人驾驶技术进一步落地,对道路感知技术的要求会越来越高,在此需求的推动下,雷视融合技术得到迅猛的发展。雷视融合采用视频和雷达的融合应用,实现光及波的两大技术的优势互补,从而发挥出更大的效果,通过雷视融合,可以更精确的感知道路,辅以其他基础数据,实现道路的全息化及数字孪生等应用。
2、技术的应用需要接受实践的检验,在目前普遍使用的是一体式的雷视融合,即将雷达和摄象机做了集成化,优点是安装部署相对方便,但也有致命的缺点,一体化设计造成了雷达及摄像机会因为安装角度的问题,造成其采集的道路的覆盖范围重合度过高,这就影响了一体化雷视系统的道路采集的范围过小,普遍的最佳数据采集的道路覆盖范围在100~150米左右,这就大大的限制了其应用的效果及浪费了建设投资的性价比。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种分体式的雷视融合的系统及方法。
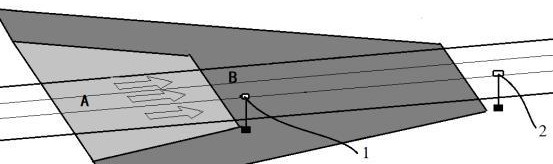
2、为实现上述目的,本发明采用了如下技术方案:一种分体式的雷视融合的系统,包括视频摄像机、毫米波雷达。
3、所述视频摄像机和所述毫米波雷达的探测方向与道路车辆行驶方向相反,所述视频摄像机设于所述毫米波雷达前方,所述视频摄像机设于所述毫米波雷达探测范围内;
4、所述视频摄像机和所述毫米波雷达之间设有供两设备进行数据交换得数据链路;
5、所述毫米波雷达还包括数据处理单元,所述数据处理单元处理所述视频摄像机和所述毫米波雷达采集到的数据。
6、进一步地,所述视频摄像机为道路原有监控摄像机,或其他功能卡口摄像机,或者该系统内中的专用摄像机。
7、进一步地,所述毫米波雷达在垂直方向上的有效探测距离为500米以上。
8、进一步地,所述视频摄像机在识别车牌的过程中,其性能表现最佳的距离为100米。
9、进一步地,所述视频摄像机和所述毫米波雷达之间的距离小于或等于400米。
10、一种分体式的雷视融合的方法,包括以下步骤:
11、s1、测定所述视频摄像机和所述毫米波雷达的全球定位坐标,并保存于各自的配置中。
12、s2、目标车辆进入探测区域,所述视频摄像机采集目标车辆的相关参数a;
13、所述相关参数a为所述视频摄像机根据识别到的目标车辆,采集到的目标车辆的数据;
14、所述视频摄像机识别车辆属性a,并为此车辆标记唯一id,设为a;
15、所述相关参数a包括:车辆属性a和车辆标记id a;
16、所述车辆属性a包括:车牌号码、车牌颜色、车辆颜色、车辆类别、车辆所处车道、车辆的近似速度、距离摄像机的近似距离、进入时间。
17、s3、所述毫米波雷达采集目标车辆的相关参数b;
18、所述毫米波雷达通过毫米波识别进入的目标车辆,检测得到目标车辆的车辆属性b,并为此车辆标记唯一id,设为b;
19、所述相关参数b为所述毫米波雷达根据识别到的目标车辆,采集到的目标车辆的数据;
20、所述相关参数b包括:车辆属性b和车辆标记id b;
21、所述车辆属性b包括:车辆与所述毫米波雷达的精确距离、车辆所处车道、进入时间、车辆类别、车辆的精确速度。
22、s4、目标车辆匹配;
23、具体包括以下子步骤:
24、s41、所述视频摄像机通过数据链路,将采集的相关参数a自身的全球定位坐标发送至所述毫米波雷达。
25、s42、所述数据处理单元通过所述视频摄像机和所述毫米波雷达的全球定位坐标,计算两者之间的距离。
26、s43、所述数据处理单元将车辆属性a中与车辆属性b同一属性的数据进行比较匹配,从而确定所述视频摄像机发送的车辆与所述毫米波雷达测定的车辆是匹配成功的;
27、所述同一属性的数据包括:车辆类别、车辆所处车道、进入时间、车辆的近似速度、距离摄像机的近似距离。
28、具体的,
29、比较车辆属性a和车辆属性b中的车辆类别是否相同,
30、比较车辆属性a和车辆属性b中的车辆所处车道是否相同,
31、比较车辆属性a和车辆属性b中的进入时间是否相同,
32、比较车辆属性a中的车辆的近似速度与车辆属性b中的车辆的精确速度是否相同,
33、比较车辆属性a中的距离摄像机的近似距离,与车辆属性b中的车辆与所述毫米波雷达的精确距离的差值绝对值,是否与步骤s42中计算的距离相同;
34、若都相同,则确定所述视频摄像机发送的车辆与所述毫米波雷达测定的车辆是匹配成功的,执行步骤s5;
35、若有不同的,则所述视频摄像机发送的车辆与所述毫米波雷达测定的车辆是不匹配的。
36、本发明通过数据的相互比对和叠加,实现了对目标车辆的高效、准确的检测与跟踪,并提供了对漏检、错检、检测准确性的筛查、容错以及精确化的方法。
37、s5、匹配成功后,所述毫米波雷达锁定目标车辆,将相关参数a叠加到相关参数b中;
38、将相关参数a中,所述毫米波雷达无法检测的属性融进相关参数b中;
39、将车辆标记id a和车辆标记id b对应关联起来,指向同一个当前目标车辆;
40、s6、所述视频摄像机和所述毫米波雷达实时进行事件检测,并进行事件归属记录;
41、具体包括以下子步骤:
42、s61、在整个探测范围内,所述毫米波雷达实时跟踪目标车辆的动作,并存储在内置的目标车辆事件库中,包括变更车道、加速、减速、当前位置;
43、s62、所述视频摄像机在其有效范围内进行事件检测,包括变更车道、加速、减速、抛洒物、烟雾,并通过数据链路发送至所述毫米波雷达;
44、s63、通过车辆标记id a和车辆标记id b,将所述视频摄像机检测到的事件对应归属到相匹配的目标车辆事件库中;
45、s64、所述毫米波雷达实时将目标车辆事件库中的数据发送至数据汇聚点,以供后台处理和呈现。
46、与现有技术相比,本发明的有益效果为:
47、1、本发明可以根据现场路段的路况,灵活地部署所述视频摄像机和所述毫米波雷达,无需同时满足两种不同设备的共同条件,增加了系统在不同环境中的适应性。
48、2、本发明能够更好地利用现有设备,实现资源的充分利用,从而达到节约化投资的效果。通过巧妙地组合和配置分体式的设备,可以最大程度地提高设备的使用率,减少冗余,使整体更加经济高效。
49、3、在检测范围方面,本发明的探测覆盖范围明显大于一体式雷视融合的探测覆盖范围,为更广泛的监测提供了可能性,增强了系统的监测效能。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187452.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。