一种与自动驾驶货运车队混行场景的匝道驾驶辅助方法
- 国知局
- 2024-07-31 20:41:45
本发明属于驾驶辅助的,具体涉及一种与自动驾驶货运车队混行场景的匝道驾驶辅助方法。
背景技术:
1、随着自动驾驶货运车队技术的不断发展以及新技术基础设施建设的不断完善,未来我国高速公路上极有可能会存在一定数量的自动驾驶货运车队。由于目前自动驾驶技术在商业应用上仍处于发展初期,自动驾驶车辆数量较少,且其使用范围受限,我国高速公路上未来极可能会出现自动驾驶货运车队和人工驾驶车辆混合行驶的情况。针对该混行交通场景,对人工驾驶车辆而言,自动驾驶货运车队和人工驾驶小汽车车辆的行驶速度可能存在差异,车速不匹配问题易导致车辆之间的相对位置发生变化,增加车辆之间的接近程度,导致碰撞风险增大。同时,货车具有体积大、重量大、视野差、不易控制、失控后果严重等特点,危险区域更广,会更大程度地影响附近区域内的人工驾驶员安全。
2、针对上述复杂的混行场景,驾驶辅助系统有望为解决上述难题提供可行的解决方案。近年来,随着科技的不断进步,驾驶辅助技术也取得了飞速发展。驾驶辅助技术可以通过车辆与车辆之间的通信、车辆与基础设施之间的通信、车辆与车内设备之间的通信等方式,能够提高驾驶员的安全性、舒适性和驾驶效率。在高速公路上,驾驶辅助系统可以通过与自动驾驶货运车队通信并提供车辆信息,协助驾驶员调整行驶速度、变道、跟车等行驶行为,以减少与货车之间的距离,从而避免制造交通拥堵。此外,驾驶辅助系统还可以监测驾驶员的疲劳程度,并提供提醒,以保障驾驶员的安全驾驶。总体而言,驾驶辅助系统有望可以帮助驾驶人根据辅助信息提前做出合理的变道决策,减少自动驾驶货运车队对人工驾驶车辆造成的视线遮挡、心理压力等负面影响,进而提高人工驾驶车辆的交通安全性、减少交通事故,故有必要探究驾驶辅助系统对该混行场景下人工驾驶车辆的强制换道行为的安全影响。
3、基于此,现有技术一,用于准备和/或实施变道的方法和辅助系统:该方法涉及用于自动地准备和/或实施自身车辆的可能的变道的方法和用于实施方法的驾驶辅助系统,以实现自身车辆在流动交通中借助驾驶辅助系统从多车道道路的第一车道运动到第二车道。在流动的交通中在相邻车道上检测到足够大的间隙并且通过自身车辆的横向行驶能够变道和并入所述间隙时,驾驶辅助系统借助信号装置将可选的行驶变道信号化。具体包括以下步骤:
4、步骤一:检测相邻车道间隙。驾驶辅助系统检测自身车辆与第一车道相邻的车道上的间隙。其中,间隙位于两个前后相接行驶的车辆之间。
5、步骤二:调整跟车距离和速度。驾驶辅助系统根据检测到的间隙信息,调整自身车辆相对前行车辆的跟车距离和/或跟车速度。
6、步骤三:执行变道。通过自身车辆的横向行驶实现变道,并将自身车辆并入相邻车道的间隙中。
7、该现有技术的不足为:
8、1.该方法中辅助信息的呈现形式为“可以向左(或向右)变道”,不包含如剩余距离、限速等辅助信息。
9、2.该方法通过驾驶辅助系统调整自身车辆的跟车距离或跟车速度,适用于自动驾驶车辆,但不适用于混行场景下对人工驾驶车辆的变道辅助。
10、3.在该方法中,仅考虑了自身车辆与相邻车道车辆的间隙,未聚焦于下匝道的强制变道行为,也未考虑车辆间的安全指标以及人工驾驶车辆当前距匝道的距离。因此,全程稳定性及安全性可能较低。
技术实现思路
1、本发明的目的在于针对现有技术中的上述不足,提供一种与自动驾驶货运车队混行场景的匝道驾驶辅助方法,以解决现有的驾驶辅助系统适用于自动驾驶车辆,但不适用于混行场景下对人工驾驶车辆的变道辅助的问题。
2、为达到上述目的,本发明采取的技术方案是:
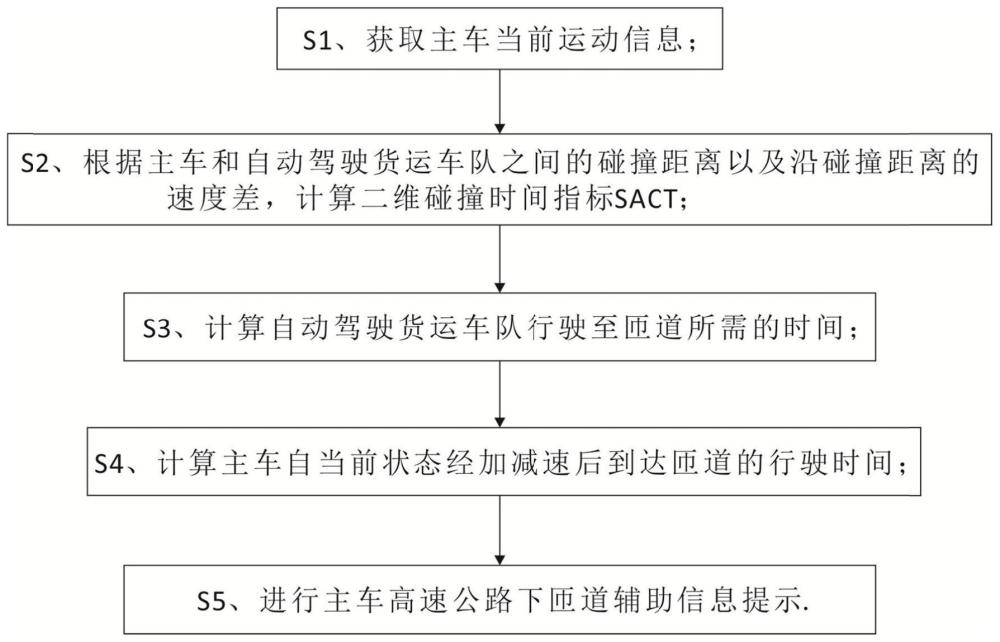
3、一种与自动驾驶货运车队混行场景的匝道驾驶辅助方法,其包括以下步骤:
4、s1、获取主车当前运动信息;
5、s2、根据主车和自动驾驶货运车队之间的碰撞距离以及沿碰撞距离的速度差,计算二维碰撞时间指标sact;
6、s3、计算自动驾驶货运车队行驶至匝道所需的时间tp;
7、s4、计算主车自当前状态经加减速后到达匝道的行驶时间tm;
8、s5、根据二维碰撞时间指标sact、自动驾驶货运车队行驶至匝道所需的时间tp、主车自当前状态经加减速后到达匝道的行驶时间tm,进行主车高速公路下匝道辅助信息提示。
9、进一步地,步骤s1中主车当前运动信息,包括:
10、主车的坐标、速度、加速度、距离匝道的剩余距离,以及自动驾驶货运车队的首车当前的坐标、速度、剩余距离。
11、进一步地,步骤s2中计算二维碰撞时间指标sact,包括:
12、若主车落后于自动驾驶货运车队的车头,即lm>lp,则二维碰撞时间指标sact为:
13、
14、
15、若主车落领先于自动驾驶货运车队的车头,即lm≤lp,则二维碰撞时间指标sact为:
16、
17、
18、其中,lm为主车当前的剩余距离,lp为自动驾驶货运车队首车当前至匝道的距离;ldis为主车和自动驾驶货运车队之间沿碰撞距离,d为主车和自动驾驶货运车队后轴中点间的笛卡尔距离;lm为主车车长,carp、carm分别为自动驾驶货运车队和主车的后轴距;vm为主车速度;vp为自动驾驶货运车队速度;α和θ为主车车尾与自动驾驶货运车队车头中点连线与竖直线、水平线的夹角;δv为主车和自动驾驶货运车队之间沿碰撞距离的速度差。
19、进一步地,步骤s3中计算自动驾驶货运车队行驶至匝道所需的时间tp,包括:
20、
21、其中,vp为自动驾驶货运车队的行驶速度。
22、进一步地,步骤s4中计算主车自当前状态经加减速后到达匝道的行驶时间tm,包括:
23、
24、其中,tacc为主车自当前状态加速至完成变道超车所需的加速行驶时间;tdec为主车减速阶段的减速时间;lslow为主车完成超车动作,驶入最右侧车道时,减速至目标速度所需的减速距离;vr为主车完成变道动作到达右侧车道时的速度;vobj为减速的目标速度;adec为主车减速过程中的减速度。
25、进一步地,步骤s5中主车高速公路下匝道辅助信息提示,包括下匝道方案推荐,下匝道方案推荐,包括:
26、若满足条件一或者条件二,则推荐主车驾驶人加速超车,并在屏幕上显示“允许变道,建议加速超车”;
27、若不满足条件一且不满足条件二,则建议主车驾驶人减速让行,屏幕上显示“允许变道,建议减速慢行”;
28、其中:
29、条件一、主车自当前状态经加减速后到达匝道的行驶时间tm<自动驾驶货运车队行驶至匝道所需的时间tp;
30、条件二、主车至匝道的距离lmain≥500且二维碰撞时间指标sact≥5。
31、进一步地,主车高速公路下匝道辅助信息提示,还包括超速提醒,所述超速提醒具体为:
32、若主车速度高于120km/h时,将进行限速提醒,在屏幕正上方显示超速图标;若速度恢复至120km/h限速以下,限速图标消失。
33、进一步地,主车高速公路下匝道辅助信息提示,还包括车距显示,所述车距显示具体为:在前车未变道前,实时显示与前车的距离。
34、进一步地,主车高速公路下匝道辅助信息提示,还包括剩余距离提示,所述剩余距离提示具体为:显示主车至匝道的距离,降低自动驾驶货运车队的视觉遮挡对驾驶人的影响。
35、进一步地,主车高速公路下匝道辅助信息提示,还包括语音导航,所述语音导航,包括:
36、(1)在主车剩余距离为3050m时,播放“三公里后,向右前方行驶,走某出口”,持续时间为5s;
37、(2)在主车剩余距离为2050m时,播放“两公里后,向右前方行驶,走某出口”,持续时间为5s;
38、(3)在主车剩余距离为1050m时,播放“一公里后,向右前方行驶,走某出口”,持续时间为5s;
39、(4)在主车剩余距离为550m时,播放“五百米后,向右前方行驶,进入匝道,走某出口,请走最右侧车道”,持续时间为9s;
40、(5)在主车剩余距离为350m时,播放“三百米后,向右前方行驶,进入匝道,走某出口,请走最右侧车道”,持续时间为9s;
41、(6)在主车到达匝道口后,播放“向右前方行驶,进入匝道,走某出口”,持续时间约为5s。
42、本发明提供的与自动驾驶货运车队混行场景的匝道驾驶辅助方法,具有以下有益效果:
43、本发明关注高速公路下匝道临近区人工驾驶车辆与自动驾驶货运车队交互时的混行场景,结合人工驾驶车辆运动过程的行为特点和安全风险,构建了高速公路下匝道驾驶辅助方法,对驾驶人进入匝道方式选择做出下匝道行驶方案推荐,并提供限速提醒、车距提示、语音导航以及剩余距离等辅助提示信息,旨在提高驾驶安全性与效率,优化驾驶员在应对下匝道场景时的决策过程。
44、2、本发明针对高速公路下匝道临近区的复杂交通环境,聚焦于人工驾驶车辆与自动驾驶货运车队交互的混行场景,充分考虑车辆行驶的物理特性和行为特征,依据可靠性和适用性原则建立基于冲突及驾驶时间的下匝道方案推荐的模型框架。
45、3、本发明依据辅助信息的可读性、一致性和合理性设计基于安全换道策略的下匝道驾驶辅助系统,对驾驶人进入匝道方式选择做出方案推荐,并提供限速提醒、车距提示、语音导航以及剩余距离等辅助提示信息。
46、4、本发明能够为相关管理部门制定更加科学的交通规则和管理政策提供支持,从而促进高速公路货运车队的安全运行,为驾驶辅助系统的研发和应用提供数据支持和验证,从而提高交通安全性能和人机交互体验。
47、5、本发明构建了二维碰撞时间指标sact,以更有效地识别换道等横向运动中的潜在交通冲突;且针对高速公路下匝道临近区人工驾驶车辆与自动驾驶货运车队混行的交通场景,充分考虑货运车队对人工驾驶车辆的安全影响,构建了基于冲突及驾驶时间的下匝道方案推荐的模型框架;本发明组织开展驾驶模拟实验收集实验数据,经数据分析及统计建模发现,高速公路下匝道驾驶辅助系统可以降低驾驶人行驶过程中的心理压力,且能够降低事故风险。
本文地址:https://www.jishuxx.com/zhuanli/20240731/187465.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表