高速公路改扩建施工期不良视距路段识别与风险预警方法与流程
- 国知局
- 2024-07-31 20:41:43
本发明涉及道路交通领域,具体涉及一种高速公路改扩建施工期不良视距路段识别与风险预警方法。
背景技术:
1、山区高速公路在改扩建拼宽施工时,若路侧有高边坡则通常会在原断面和扩建断面之间竖立施工挡墙(板)以保证安全。但施工挡墙(板)在弯道段会缩短驾驶人的视距,将在改扩建前驾驶人视距内的交通状况(如交通事故或交通拥堵产生的排队)变成了“超视距”信息,从而产生交通安全风险,如图1(a)和(b)所示。尤其是原断面硬路肩部分也被施工区侵占的时候,视距的缩短会更严重,造成交通安全风险加剧,因此,识别不良视距路段来降低交通安全风险具有重要意义。
2、目前,主要是通过评估行车视距来识别不良视距路段,现有的行车视距评估通常使用施工图和现场测量来手动量化,人工检查包括在施工图上画线,并识别道路线形和视线之间的障碍物,这是一个非常繁琐和耗时的过程,在高速公路大规模实施时极具挑战性。并且,人工检查也只能在平面投影上处理水平曲线处的视距,而垂直线形的变化无法用该方法进行快速评估。此外,使用施工图手动评估视距也仅限于图纸上捕捉的特征,如果路侧茂密的植被或者临时施工挡墙/板没有在图上完全的展示出来,则行车视距的评估就会不够准确,存在不良视距路段的识别准确性差的问题。
3、因此,为解决以上问题,需要一种高速公路改扩建施工期不良视距路段识别与风险预警方法,能够自动评估高速公路沿线的行车视距,准确确定视距不足风险路段。
技术实现思路
1、有鉴于此,本发明的目的是克服现有技术中的缺陷,提供高速公路改扩建施工期不良视距路段识别与风险预警方法,能够自动评估高速公路沿线的行车视距,准确确定视距不足风险路段。
2、本发明的高速公路改扩建施工期不良视距路段识别与风险预警方法,包括如下步骤:
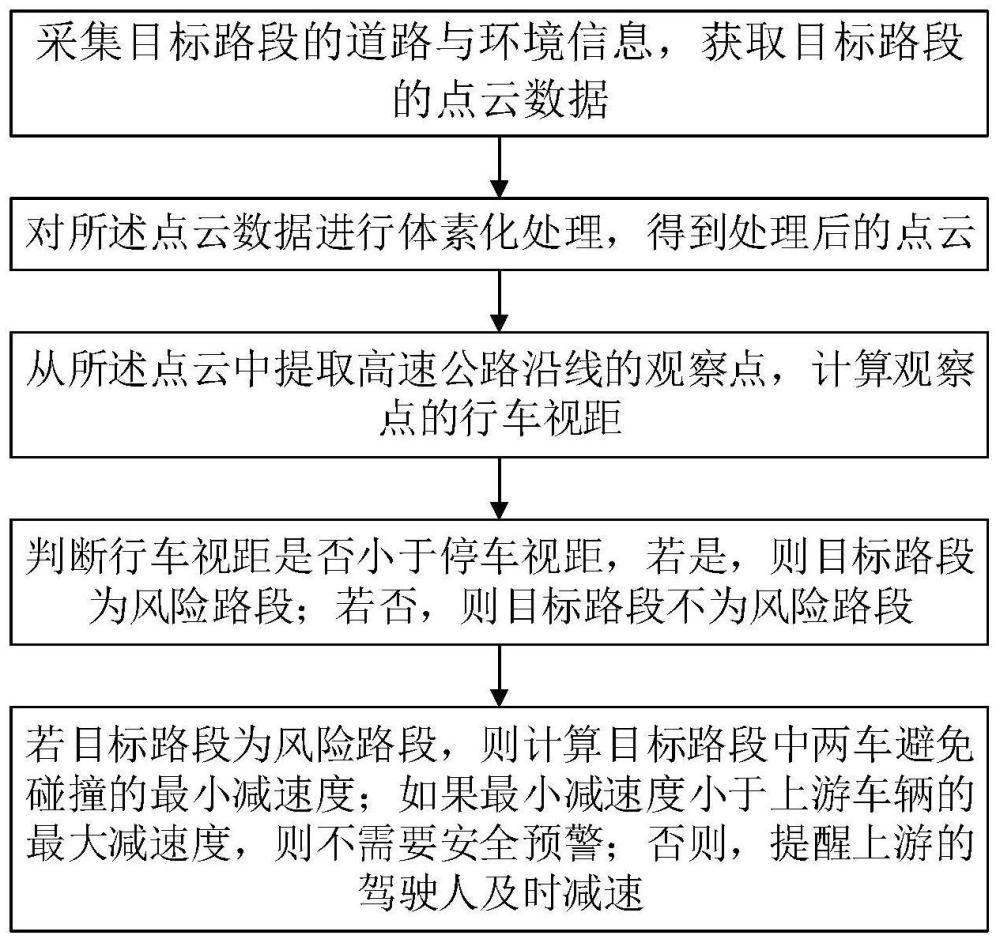
3、采集目标路段的道路与环境信息,获取目标路段的点云数据;
4、对所述点云数据进行体素化处理,得到处理后的点云;
5、从所述点云中提取高速公路沿线的观察点,计算观察点的行车视距;
6、判断行车视距是否小于停车视距,若是,则目标路段为风险路段;若否,则目标路段不为风险路段。
7、进一步,对所述点云数据进行体素化处理,具体包括:
8、使用基于网格的子采样将点云数据离散化,形成三维体素网格;
9、根据点云数据中的点在三维空间中的位置,将点云数据中的各个点分配给给体素;其中,体素尺寸略大于扫描系统的扫描线之间间距,所述扫描系统为采集信息时所使用的扫描设备。
10、进一步,从所述点云中提取高速公路沿线的观察点,具体包括:
11、将所述点云中包括道路信息的点云作为候选点云,从候选点云中提取轨迹种子点,所述轨迹种子点是驾驶人视线起点的集合;
12、将满足观察点间距的轨迹种子点作为高速公路沿线的观察点。
13、进一步,计算观察点的行车视距,具体包括:
14、对观察点集合i进行复制,得到目标点集合j;其中,i中每个观察点的高度为驾驶人的眼睛高度,j中所有目标点的高度为车辆的尾灯高度;
15、将观察点和目标点排列到目标路段上,建立连接三维空间中每对观察点和目标点的视线;
16、沿着视线选取多个点,并且基于每个点在三维空间中的位置,将点分配给体素单元;
17、将多个点聚类到不同的聚类组中,将距离视线起点最近的聚类组作为第一个障碍物,并将包含第一个障碍物的体素单元作为目标体素单元;
18、将观察点与目标体素单元质心之间的距离作为观察点的行车视距。
19、进一步,根据如下式子确定连接观察点和目标点的视线方程:
20、
21、其中,t表示视线上的任意一点;i中观察点i的坐标为(xi,yi,zi);j中目标点j的坐标为(xj,yj,zj);视线上点t的坐标为(x(t),y(t),z(t))。
22、进一步,还包括:
23、若目标路段为风险路段,则计算目标路段中两车避免碰撞的最小减速度amin;如果则需要进行安全预警,提醒上游的驾驶人及时减速;如果则不需要安全预警;其中,为上游车辆的最大减速度。
24、进一步,根据如下公式确定最小减速度amin:
25、
26、其中,上游车辆的速度为vt、最大减速度为所处位置的行车视距为asdt;下游最后一辆车的速度为ve、最大减速度为上游车辆与下游最后一辆车的间距为det。
27、进一步,将上游车辆与下游最后一辆车均作为目标车辆,根据如下公式确定目标车辆的速度v:
28、
29、其中,n为区域rj的总数量,相机视图被分成若干区域,所述相机视图用于拍摄目标车辆;∑vij为相机视图中各个区域的速度之和;
30、∑vi为目标车辆i在区域rj中若干速度vi的相加之和,δfj为目标车辆i在区域rj的跟踪轨道中的帧数;
31、dj代表两个像素之间的真实距离,δti代表帧率的倒数;
32、为目标车辆i在一对视频帧中的位置间隔;si(t)是当前视频帧中的目标车辆i的位置,si(t-δt)是前一帧中目标车辆i的位置,δt是两个连续帧之间的时间间隔。
33、本发明的有益效果是:本发明公开的一种高速公路改扩建施工期不良视距路段识别与风险预警方法,通过车载激光雷达数据自动评估高速公路沿线的行车视距,从而确定视距不足风险路段,增设交通流临时感知设备;基于计算机视觉实时检测路段的交通流状态,通过量化避免碰撞所需最小减速度来确定预警的阈值,通过路侧临时信息屏发布信息和安全警示设施闪烁等方式提醒上游的驾驶人及时减速,从而保障高速公路改扩建施工期不良视距路段的交通安全。
技术特征:1.一种高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:对所述点云数据进行体素化处理,具体包括:
3.根据权利要求1所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:从所述点云中提取高速公路沿线的观察点,具体包括:
4.根据权利要求3所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:计算观察点的行车视距,具体包括:
5.根据权利要求4所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:根据如下式子确定连接观察点和目标点的视线方程:
6.根据权利要求1所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:还包括:
7.根据权利要求1所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:根据如下公式确定最小减速度amin:
8.根据权利要求1所述的高速公路改扩建施工期不良视距路段识别与风险预警方法,其特征在于:将上游车辆与下游最后一辆车均作为目标车辆,根据如下公式确定目标车辆的速度v:
技术总结本发明公开了一种高速公路改扩建施工期不良视距路段识别与风险预警方法,包括:采集目标路段的道路与环境信息,获取目标路段的点云数据;对所述点云数据进行体素化处理,得到处理后的点云;从所述点云中提取高速公路沿线的观察点,计算观察点的行车视距;判断行车视距是否小于停车视距,若是,则目标路段为风险路段;若否,则目标路段不为风险路段。本发明能够自动评估高速公路沿线的行车视距,准确确定视距不足风险路段。技术研发人员:俞山川,王少飞,宋浪,杨国峰,李敏,李远哲,马璐,朱湧,谢耀华,骆中斌,唐荣娇,周欣,刘馥齐,陈晨,陈奇受保护的技术使用者:招商局重庆交通科研设计院有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240731/187459.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。