一种基于高速公路监控视频的全时交通流状态感知评价方法与流程
- 国知局
- 2024-07-31 20:39:02
本发明属于智能交通,具体为一种基于高速公路监控视频的全时交通流状态感知评价方法。
背景技术:
1、随着城市化进程的加速和交通流量的不断增加,对高速公路交通状况进行准确、实时的监测和分析变得至关重要。传统的交通流参数检测方法主要依赖于传感器、线圈等硬件设备,这些设备通常需要安装在高速公路上,维护成本较高且部署困难。此外,由于高速公路网络的复杂性和规模,传统方法往往无法提供全面、精确的交通流参数。
2、随着计算机视觉和深度学习的快速发展,基于视频监控的交通流参数检测方法逐渐受到关注。通过利用高速公路上已经安装的监控摄像头,可以实时获取道路交通的图像或视频数据。这为基于计算机视觉的交通流参数检测提供了新的机遇。
技术实现思路
1、本发明提出一种基于高速公路监控视频的全时交通流状态感知评价方法,其目的在于解决了高速公路交通流参数检测及状态评价的问题。
2、本发明实施例提供了一种基于高速公路监控视频的全时交通流状态感知评价方法,包括:
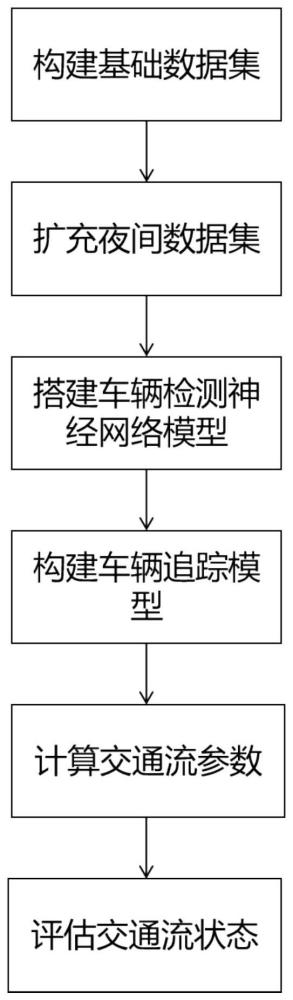
3、s1:构建基础数据集。获取高速公路监控视频,其中包括日间与夜间的高速公路监控视频,并使用labelimg软件对日间的数据集进行标定,作为基础数据集。
4、s2:扩充夜间数据集。使用域适应方法将基础数据集中的真实的白天图像转换为合成的夜间图像,作为夜间数据集。
5、s3:搭建车辆检测神经网络模型。搭建faster r-cnn模型用于车辆检测。
6、s4:构建车辆追踪模型。搭建deepsort多目标追踪模型用于车辆的追踪。
7、s5:计算交通流参数。通过faster r-cnn和deepsort模型对高速公路监控视频进行检测追踪,获取车辆轨迹数据,通过车辆轨迹数据进行交通流量、速度和密度的计算,并根据交通流速度和密度提出了一种评价方法。
8、优选地,训练神经网络模型需要大量手动标记的图像。因此,使用域适应方法对夜间数据进行扩充,极大节省了人力时间成本。
9、优选地,faster r-cnn在许多与目标检测相关的任务中具有出色的性能。它是一种广泛使用的基于cnn的深度学习模型,模型复杂度较低,速度较快。
10、优选地,deepsort是一种基于深度学习的多目标追踪模型,在车辆追踪任务中具有出色的性能。它结合了深度特征提取和目标关联的技术,能够准确地跟踪多个车辆,并处理目标的遮挡和出现消失等复杂场景。
11、本发明的有益效果为:
12、1.本发明基于高速公路监控视频对交通流参数进行了检测,平对交通状态进行了评价,对交通管理者进行区域性的管理提供了很大的帮助。
13、2.本发明使用了的模型结构轻量化,计算速度快,能够较快能得到当前的交通流状态。
14、3.本发明使用了域适应方法对数据集进行了扩充,补充了夜间的数据集,解决了现有数据集不适用于夜晚的车辆检测的问题。
15、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
技术特征:1.一种基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于,包括下述步骤:
2.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:获取高速公路日间与夜间视频,并使用labelimg软件对日间的数据集进行标定,作为基础数据集。
3.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:使用域适应方法将基础数据集中的真实的白天图像转换为合成的夜间图像,作为夜间数据集。
4.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:通过训练两个生成器和两个对抗性鉴别器来完成的,生成器通过将一个图像作为输入来生成新图像,鉴别器用于对真假图像进行分类,定义了两个生成器gs-t和gt-s作为传递函数,前者自域s从域t中学习传递函数,后者自域t从域s中学习传递函数,两个对抗性鉴别器dt和ds对应于gs-t和gt-s。
5.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:搭建faster r-cnn模型用于车辆检测,faster r-cnn引入了区域生成网络,可以在单个前向传播中同时生成候选框和提取特征,不需要在每个候选框上进行额外的特征提取,这样可以显著提高检测速度,使得faster r-cnn比传统的r-cnn和fast r-cnn更快。
6.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:对于每个检测到的车辆,将其提取的特征与之前帧中的已知车辆特征进行匹配,通过计算特征之间的相似度,我们可以判断当前检测到的车辆与之前追踪到的车辆是否属于同一个目标,根据特征匹配和关联的结果,使用deepsort算法来进行车辆追踪,deepsort使用卡尔曼滤波器估计车辆的位置和速度,并使用匈牙利算法来解决多目标关联问题,以确保每个追踪的车辆与实际车辆的对应关系。
7.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:利用车辆检测结果,可以得到每一帧中日间和夜间车辆的详细边界框,然后计算出交通密度和速度,密度可以通过计算单位高速公路长度中的车辆来获得,对于速度估计,通过计算两个相邻帧之间被检测车辆中心点的位移来确定,在每张图像帧中,假设物体在现实世界中有长度l1(以米为单位),在图像中有长度l2(以像素为单位),而道路段的长度在图像中有ls像素,为了将像素位移转换为米,使用标准车道标线简单地校准的比率(以米/像素为单位),假设d(p,x)和d(p,y)表示提取的第p个车辆的运动向量在水平和垂直方向上,那么第p个运动向量的整体运动幅度dp(以像素/帧为单位)可以通过以下方程计算:
8.根据权利要求1所述的基于高速公路监控视频的全时交通流状态感知评价方法,其特征在于:根据密度、速度双指标提出交通流密度速度指数,公式如下:
技术总结本发明提出了一种基于高速公路监控视频的全时交通流状态感知评价方法,属于智能交通技术领域,包括:获取高速公路监控视频,构建数据集;使用域适应方法对夜间车辆数据集进行扩充;使用Faster R‑CNN模型对车辆进行检测;使用DeepSORT模型对车辆进行追踪;根据车辆检测与追踪获得的轨迹数据计算高速公路交通流参数,并提出一种速度密度指标综合评估高速公路交通状态。本发明提出了一种域适应方法,扩充了高速公路夜间数据集,极大节省了人力成本及时间成本,并使得该方法在日间与夜间均能使用,增强了该方法的鲁棒性。技术研发人员:姚昌梁,陈璐受保护的技术使用者:南京凌云科技发展有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240731/187229.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表