一种车路协同路侧感知信息的数据提取与增强方法及系统与流程
- 国知局
- 2024-07-31 21:06:20
本发明属于车路协同,具体涉及一种车路协同路侧感知信息的数据提取与增强方法及系统。
背景技术:
1、路侧感知系统是车路协同系统的重要组成,负责全方位感知计算交通参与者的运动状态、属性识别,以及基于感知结果的全域交通信息统计与预测。车路协同系统的建设和运维,离不开车路协同路侧感知信息质量的实时评测和增强校正。路侧感知信息质量的主要度量指标包括准确率、位置精度、系统稳定性、时间延迟等指标。路侧感知信息的计算过程,主要受到传感与计算硬件、道路交通环境感知智能算法、自然物理环境、交通状况等因素的影响。
2、路侧感知信息质量评测方法主要指测试内容的组织形式以及开展测试的途径。一方面,就车路协同系统的特点而言,在装有obu的车辆进入车路协同系统区域后,obu接收的信息是车路协同系统综合感知、传输、计算、融合计算的结果,因此测试方法必须提供车路协同系统的融合感知的性能测试,保证感知计算性能得到体现;另一方面,从测试的可重复性、可控性等需求出发,又希望测试对象在特定条件下被测试。根据上述两方面需求,按照测试方法对测试输入和测试过程要求的不同,可以将测试方法分为基于用例的测试方法、基于场景的测试方法、基于探针的精密测试方法和仿真测试。
3、现有技术如申请号为cn202110243239.1的中国专利文献,其公开了一种自动驾驶众包高精度地图更新方法、系统及介质,主要内容包括:采集并获取道路交通场景下的多类传感器数据,包括激光雷达、影像视频、gnss定位,经过单源/多源数据匹配的数据配准后,进行数据标注,得到道路交通场景中,所有移动目标(行人、机动车、非机动车等)的准确的地理位置,以及运动轨迹。数据标注,视为融合感知计算的真值。通过对比感知计算结果与真值,来统计路侧感知计算的各项性能指标,如检测准确率、虚报比例、目标感知位置精度、通信时间延时。
4、现有基于传统数据标注方式的感知算法评测方法,精度较高,评测指标体系健全,但数据采集与真值标注成本高,不适合大规模车路协同系统的性能评测。同时,数据标注将花费大量人力,评测周期较长,无法做到实时的感知信息质量评测,无法支撑车路协同系统的在线实时优化。另外基于车辆轨迹数据的路侧感知信息质量评价,评价指标少,不能反映车路协同路侧感知信息质量评测技术规范。而且现有针对路侧感知信息优化,主要是从多传感器融合感知的角度,去提升道路交通目标检测与跟踪的性能。由于深度学习网络模型难以应对道路场景的多复杂性,道路目标融合感知的优化方法存在明显的性能瓶颈。
技术实现思路
1、本发明的目的之一在于提供一种车路协同路侧感知信息的数据提取与增强方法,提升路侧感知信息分类效率和实时性,增强了路侧感知信息的可信度。
2、为实现上述目的,本发明所采取的技术方案为:
3、一种车路协同路侧感知信息的数据提取与增强方法,所述车路协同路侧感知信息的数据提取与增强方法,包括:
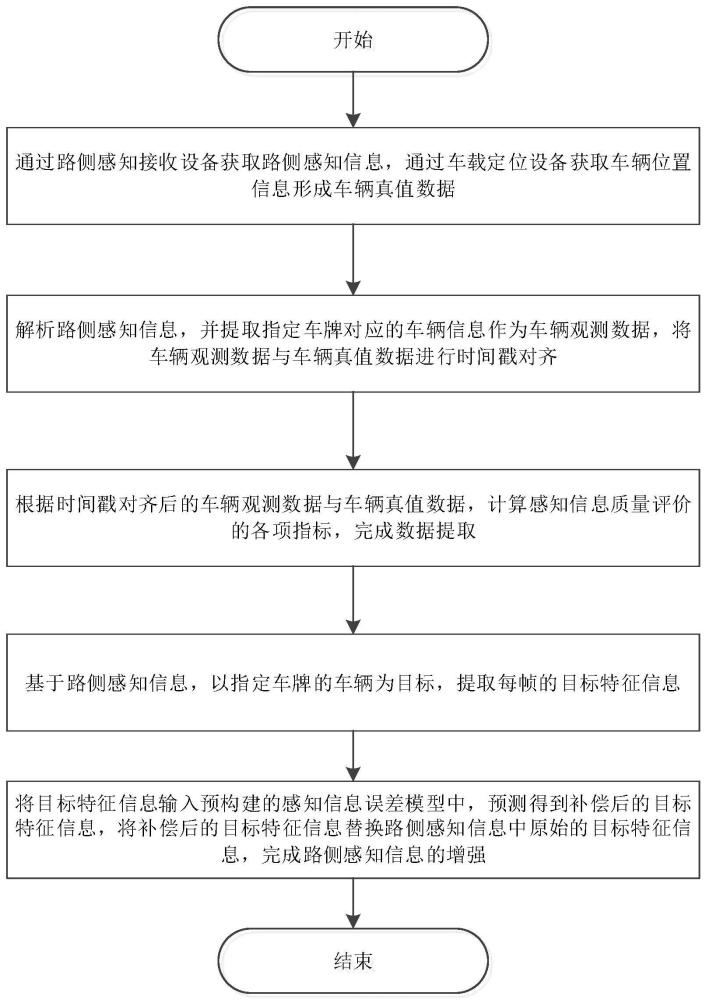
4、通过路侧感知接收设备获取路侧感知信息,通过车载定位设备获取车辆位置信息形成车辆真值数据;
5、解析路侧感知信息,并提取指定车牌对应的车辆信息作为车辆观测数据,将车辆观测数据与车辆真值数据进行时间戳对齐;
6、根据时间戳对齐后的车辆观测数据与车辆真值数据,计算感知信息质量评价的各项指标,完成数据提取;
7、基于路侧感知信息,以指定车牌的车辆为目标,提取每帧的目标特征信息;
8、将目标特征信息输入预构建的感知信息误差模型中,预测得到补偿后的目标特征信息,将补偿后的目标特征信息替换路侧感知信息中原始的目标特征信息,完成路侧感知信息的增强。
9、以下还提供了若干可选方式,但并不作为对上述总体方案的额外限定,仅仅是进一步的增补或优选,在没有技术或逻辑矛盾的前提下,各可选方式可单独针对上述总体方案进行组合,还可以是多个可选方式之间进行组合。
10、作为优选,所述将车辆观测数据与车辆真值数据进行时间戳对齐,包括:
11、提取车辆观测数据的数据频率和数据间距;
12、依次读取车辆观测数据中的车辆观测值,并获取该车辆观测值对应的时刻作为标准时刻,从车辆真值数据中取标准时刻前后各n个车辆位置信息;
13、根据2n个车辆位置信息进行三次样条曲线拟合,得到车辆位置信息的变化轨迹;
14、根据标准时刻在变化轨迹上取值,将该取值作为与所读取的车辆观测值时间戳对齐的车辆位置信息,更新车辆真值数据。
15、作为优选,所述将目标特征信息输入预构建的感知信息误差模型中,预测得到补偿后的目标特征信息,包括:
16、提取目标特征信息中的离散型变量,并为离散型变量赋值;
17、将赋值后的目标特征信息输入预构建的感知信息误差模型中,得到感知信息误差模型输出的目标特征信息;
18、判断感知信息误差模型输出的目标特征信息中的离散型变量是否与赋值时离散型变量的赋值相同,若不同则重新为离散型变量赋值并进行预测计算;若相同则计算感知信息误差模型输出的目标特征信息中的连续型变量与原始提取的目标特征信息中的连续型变量的差异,若差异小于阈值,则将感知信息误差模型输出的目标特征信息作为补偿后的目标特征信息;否则重新为离散型变量赋值并进行预测计算。
19、作为优选,所述目标特征信息包括车辆的x坐标、y坐标、类型、颜色、长、宽、高,以及车辆与路侧感知接收设备的距离;
20、其中车辆的类型和颜色为离散型变量,车辆的x坐标、y坐标、长、宽、高,以及车辆与路侧感知接收设备的距离为连续型变量。
21、作为优选,所述感知信息误差模型为神经网络模型,基于时间戳对齐后的车辆观测数据与车辆真值数据训练神经网络模型得到感知信息误差模型。
22、作为优选,所述感知信息误差模型为三层神经网络模型,所述三层神经网络模型包括输入层、隐藏层和输出层,所述输入层、输出层和隐藏层的节点数取值方式如下:
23、输入层的节点数:取目标特征信息的向量维度m作为输入层的节点数;
24、输出层的节点数:取预测结果的属性类别数n作为输出层的节点数;
25、隐藏层的节点数:
26、
27、式中,k为隐藏层的节点数,θ为1至10之间的常数。
28、作为优选,所述隐藏层的输入与输出如下:
29、第t个隐藏神经元的输入为βt:
30、
31、式中,xi为输入层的第i个输入神经元的输入,vit为输入层的第i个输入神经元到隐藏层的第t个隐藏神经元的权重;
32、第t个隐藏神经元的输出为ht:
33、
34、式中,ft为输入层到隐藏层的第t个隐藏神经元的偏置;
35、所述输出层的输入与输出如下:
36、第j个输出神经元的输入为αj:
37、
38、式中,wtj为隐藏层第t个隐藏神经元到输出层第j个输出神经元的权重;
39、第j个输出神经元的输出为pj:
40、
41、式中,g()为激励函数,yj为隐藏层到输出层的第j个输出神经元的偏置。
42、作为优选,所述激励函数为sigmoid函数,表达方式为:
43、
44、式中,x为输入激励函数的值。
45、作为优选,所述神经网络模型训练时误差计算如下:
46、
47、式中,esum为误差值,oj为车辆真值数据中的第j个变量值;
48、所述神经网络模型训练时的参数更新如下:
49、各层神经元权重的更新方法为:
50、
51、偏置的更新方法为:
52、
53、式中,τ为训练学习的速率。本发明提供的一种车路协同路侧感知信息的数据提取与增强方法,摒弃了基于数据标注的真值信息获取方法,路侧感知信息质量分类的效率和实时性大大提升。并且通过获取道路交通中车辆的实时高精度定位信息,并通过车牌号关联到路侧感知信息,再通过构建神经网络模型,反演计算道路交通目标感知信息的感知信息误差模型,优化路侧感知信息,增强了路侧感知信息的可信度。
54、本发明的目的之二在于提供一种车路协同路侧感知信息的数据提取与增强系统,提升路侧感知信息分类效率和实时性,增强了路侧感知信息的可信度。
55、为实现上述目的,本发明所采取的技术方案为:
56、一种车路协同路侧感知信息的数据提取与增强系统,包括处理器以及存储有若干计算机指令的存储器,所述计算机指令被处理器执行时实现所述车路协同路侧感知信息的数据提取与增强方法的步骤。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188380.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表