基于路侧视频流轨迹跟踪的隧道车辆辅助定位方法
- 国知局
- 2024-07-31 21:10:08
本发明涉及智慧公路与车路协同应用领域,更具体地说,涉及一种基于路侧视频流轨迹跟踪的隧道车辆辅助定位方法。
背景技术:
1、路侧视频流轨迹跟踪是指在道路一侧或者两侧,通过一定间隔连续布设视频摄像设备全程监控路面状况。目前已有相当多的研究以路侧设备为技术手段完成目标车辆的识别与跟踪,从而获取车辆位置信息,包括微波雷达、激光雷达、视频全息感知设备和rfid电子标签设备等。微波雷达设备采集范围成扇形,但往往会将干扰信息一同采集;激光雷达相比于微波雷达造价更高;rfid电子标签只能给出固定点的位置信息。故相比于其他路侧设备,视频摄像设备因更能反映路面和车辆的真实情况,往往单独或者联合其他路侧设备组成全息感知器用于交通状况监测。
2、智能手机和车辆预装导航软件所提供的车辆实时定位服务已经成为广大驾驶员实时获取出行路线信息的重要手段。然而,在隧道内提供车辆定位服务需要面对以下挑战:1)需要以现有智能手机为终端,以现有导航软件为基础;2)全球导航卫星系统在隧道内会发生信号缺失,使得导航软件在隧道内无法正常使用;3)隧道内车辆行驶速度较高,可能出现高速情况下定位信号丢失、定位精度降低、时延影响增大等问题。因此,有必要采用从车路协同的角度出发研究隧道内辅助定位技术,从而为出行者提供基础定位服务,也为开展隧道内交通状态智能监测和安全行车引导提供帮助。这也是智慧公路建设领域信息化、数字化和安全行车的重要需求。
3、然而,现有的路侧技术主要集中于某一断面或者单个设备监测范围内的车辆定位研究,针对长隧道全球导航卫星系失效,隧道内车辆的连续定位辅助导航相对较少。
技术实现思路
1、本发明要解决的技术问题在于,提供一种基于路侧视频流轨迹跟踪的隧道车辆辅助定位方法,其能够解决隧道内车辆卫星定位失效,导航系统无法正常工作的问题,依靠道路提供一个安全行车、稳定性高、车道级精度的车辆辅助定位方法。
2、本发明解决其技术问题所采用的技术方案是:构造一种基于路侧视频流轨迹跟踪的隧道车辆辅助定位方法,包括以下步骤:
3、s1、将高清车牌识别系统设置在隧道入口断面,高清摄像机按照200~250m的间距设置在隧道路侧,相邻的所述高清摄像机设置25~35m的重叠监控区,并在隧道路侧配套rsu单元;
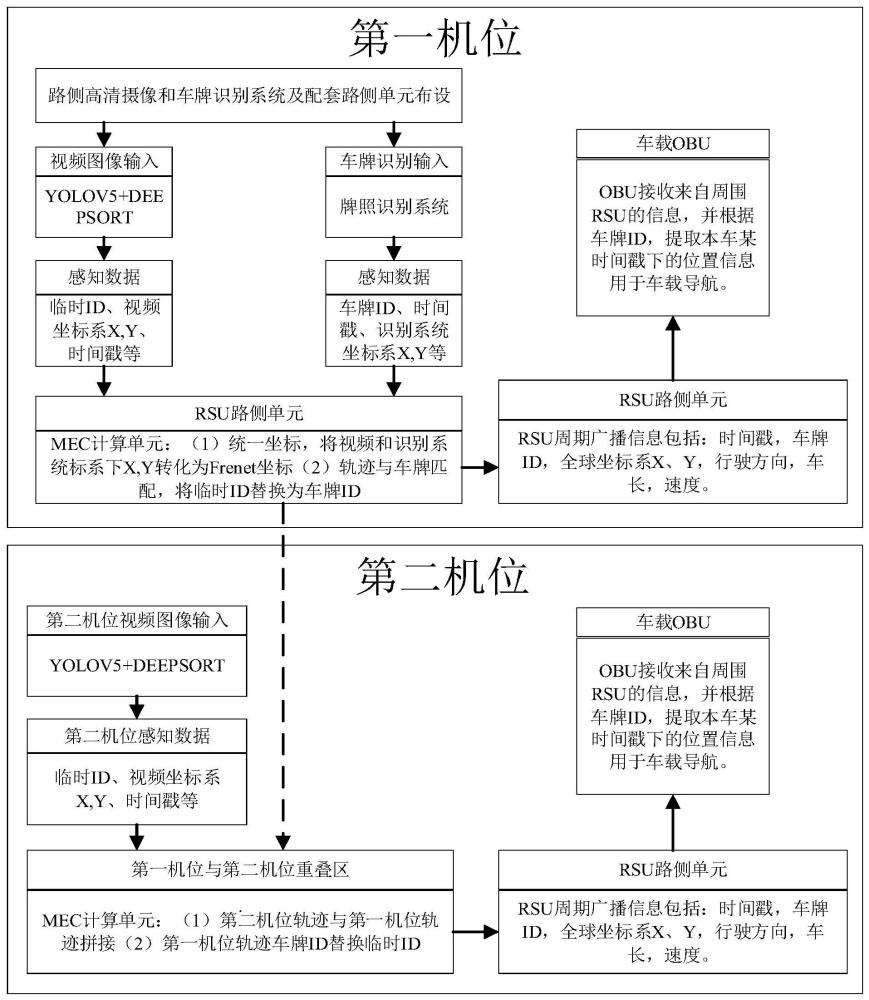
4、s2、对所述高清摄像机拍摄的视频使用视频检测算法车辆检测,并完成目标车辆的跟踪,对跟踪的目标车辆提取每一帧的横坐标、纵坐标、时间戳、行驶方向、速度、车长和车道的车辆信息,并记录形成轨迹的临时流水轨迹id;
5、s3、对所述高清车牌识别系统拍摄的车牌识别区域车辆进行车牌识别,对识别车辆提取车牌id、速度、车长、行驶方向、车道、时间戳、横坐标和纵坐标;
6、s4、在隧道路侧计算单元统一坐标系,将所有的车辆横纵坐标全部转化为frenet坐标,在同一坐标下的进行视频轨迹与车牌id的匹配,将轨迹临时流水id替换为车牌id;
7、s5、当车进入多机位重叠监控区,在隧道路侧计算单元将第二机位轨迹与第一机位轨迹拼接,完成第一机位和第二机位监控交接,拼接中的控制变量不局限于时间戳、地理位置坐标、行驶方向和车道;
8、s6、利用所述rsu单元交通信息收发模块向周围车辆按照一定频率广播信息,每条信息包括时间戳、车牌id、对应id车辆的坐标、车长、行驶方向和速度的关键信息;
9、s7、搭载obu车辆接受rsu广播的信息,并依据车牌id解析属于本车的实时位置信息用于车载导航。
10、按上述方案,所述步骤s1中,对所述高清摄像机的布置间距不做限定,依据实际设备监控范围调整,所述高清摄像机设置在隧道侧壁或者隧道洞顶,车牌识别系统设置在隧道入口处,相邻的所述高清摄像机设置25~35m重叠监控区,重叠区长度满足多机位轨迹拼接最小要求时间1.5秒;隧道路侧配套的所述rsu单元设置有交通信息收发模块和计算模块。
11、按上述方案,所述步骤s2中,对高清摄像机采集的视频进行车辆检测的算法不做限定,对车辆目标跟踪算法不做限定;提取的交通变量数据包含每一帧目标时间戳、车牌id、对应id车辆横纵坐标、车长、行驶方向和速度的关键信息,并形成视频轨迹记录流水临时id。
12、按上述方案,所述步骤s3中,对高清车牌识别系统设备不做限定,满足适应各种复杂天气的情况;所述高清车牌识别系统提取车牌id、速度、车长、行驶方向、车道、时间戳、横坐标和纵坐标的信息。
13、按上述方案,所述步骤s4中,将高清摄像机平面坐标系和车牌识别系统平面坐标系下的车辆位置全部转化为基于当前道路线形的frenet坐标;在所述frenet坐标系下,根据车牌id检测时间戳匹配同一时刻最近的车辆视频轨迹,符合条件轨迹满足相同的行驶车道、行驶方向、车长的信息,否则视为无效匹配;对匹配成功的轨迹,将轨迹临时流水id替换为车牌id,并将坐标转化为经纬度坐标,此过程由路侧计算单元完成。
14、按上述方案,所述步骤s5中,在多机位重叠监控留存足够的重叠区,路侧计算单元根据相同时间戳下不同机位车辆的质心坐标在连续帧内距离符合设定阈值认定为同一条轨迹,符合条件轨迹满足相同的行驶车道、行驶方向、车长的信息;完成第一机位和第二机位监控交接,同时将继承上一机位的车牌id信息。
15、按上述方案,所述步骤s6中,将路侧计算单元计算关联得到得轨迹信息包括时间戳、车牌id、对应id车辆的经纬度坐标、车长、行驶方向、速度的关键信息,通过所述rsu单元交通信息收发模块向周围车辆按照设备通讯协议广播发布。
16、按上述方案,所述步骤s7中,搭载obu车辆接受来自rsu广播的信息,车牌id作为唯一身份识别信息用于数据对接与匹配,车载obu只提取本车的实时位置信息在车载gps信号减弱下用于车载导航。
17、实施本发明的基于路侧视频流轨迹跟踪的隧道车辆辅助定位方法,具有以下有益效果:
18、1、本发明通过路侧连续布设多机位视频监控相机检测通行车辆的位置信息,以隧道入口的车牌识别系统完成车辆身份信息确认;通过计算单元完成行车轨迹与车牌关联,利用rsu单元和车载obu向行驶车辆播送本车地理位置坐标,以实现在隧道或其他场景全球定位系统信号减弱下辅助导航;这种综合利用路侧视频监控和车载通信设备的方法,不仅可以弥补全球定位系统信号在隧道等复杂场景中的不足,还能够提供更加准确和可靠的车辆定位信息,从而大大提高了车辆驾驶的安全性和可靠性;
19、2、本发明多机位视频监控相机还具有其它功能,包括不限于路面状况监测、交通事件报警、事件回放和交通流参数提取等。这些功能使得智慧公路建设更加全面和多元化,不仅可以帮助监测交通状况和提升交通管理效率,还能够为道路维护和事故处理提供重要数据支持;因此,路侧视频监控相机成为智慧公路建设的必要设备之一,其在车辆辅助定位方面的应用为智慧交通系统的完善提供了重要支持;
20、3、本发明提出的车辆辅助定位方法不仅在解决全球定位系统信号不足的情况下具有重要意义,同时也为智慧公路建设和交通管理提供了创新性解决方案,对提升道路交通安全性、流畅性和智能化水平具有深远影响。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表