一种基于有向图时空信息嵌入的交通流预测方法及系统
- 国知局
- 2024-07-31 21:10:15
本发明属于交通管理系统,涉及一种基于有向图时空信息嵌入的交通流预测方法及系统。
背景技术:
1、交通预测是现代交通管理系统的一个重要方面,在确保道路网络顺畅运行和提高城市交通整体效率方面发挥着举足轻重的作用。交通预测的核心是根据历史交通数据、环境因素和实时信息,预测未来的交通状况,包括车流量、车速和拥堵程度。它是众多交通相关应用的基础,包括交通信号优化、路线规划、事故管理和基础设施规划。通过准确预测交通状况,交通管理部门可以积极采取措施,缓解交通拥堵,最大限度地缩短旅行时间,减少排放,并提高道路使用者的安全。
2、而基于时空特征挖掘的交通预测方法可以捕捉到交通系统中的时空相关性,有效地感知交通系统中的时空动态变化,包括交通拥堵、交通流量变化等。这有助于及时调整交通管理策略以应对不同的交通情况。通过捕捉数据中的时空特征,能够实时地监测交通状态,并及时更新预测结果,更好地理解交通系统的运行规律和特点,从而为交通规划和管理提供更加科学的依据。这对于交通管理部门和驾驶者来说非常重要,可以帮助他们做出更加及时有效的决策,提高交通系统的效率和流畅度,减少交通事故和拥堵;针对交通数据时空特征的挖掘还可以应用于交通信号优化、路径规划、公共交通调度等多个方面,具有更广泛的应用前景。而现有的研究中往往对于全路网交通信息可获取的情况,针对只有部分交通信息可获取的情况(如只能获取单向交通信息)的研究有所缺失,而在真实的应用场景中只能获取到单向交通信息是较为常见的。
技术实现思路
1、本发明的目的是提供一种基于有向图时空信息嵌入的交通流预测方法及系统,能够更好的帮助交通管理部门和个体驾驶者应对复杂多变的交通环境,提高路网交通效率。
2、为解决上述技术问题,本发明是采用下述技术方案实现的。
3、第一方面,本发明提供一种基于有向图时空信息嵌入的交通流预测方法,包括:
4、采集实时时间序列交通数据,将采集的实时时间序列交通数据输入预先训练好的基于编码器-解码器架构和有向图的时空嵌入注意力网络模型中进行预测,端到端生成全路网多步的短期交通流预测结果;
5、其中,所述时空嵌入注意力网络模型的训练过程为:
6、采集路网中各道路的检测站历史单向交通数据和历史路网道路信息,并对采集的检测站历史单向交通数据和历史路网道路信息进行预处理,得到训练集和验证集;
7、使用所述训练集和设定初始超参数来训练所述时空嵌入注意力网络模型,通过所述验证集来调整时空嵌入注意力网络模型的超参数。
8、本发明对采集的检测站历史单向交通数据和历史路网道路信息进行预处理,这样能够提取各检测站单向交通数据的特征向量,捕获路网道路的隐藏信息。所述路网道路的隐藏信息包括有向图、交通延误惩罚矩阵和外界交通流量矩阵。本发明搭建基于编码器-解码器架构和有向图的时空嵌入注意力网络模型(stean,spatio-temporal embeddedattention network),通过所述时空嵌入注意力网络模型学习检测站单向交通数据中隐藏的时空特征,端到端生成全路网多步的短期交通流预测结果。
9、结合第一方面,进一步地,所述对采集的检测站历史单向交通数据和历史路网道路信息进行预处理的方法为:
10、对检测站历史单向交通数据进行清洗,对进行清洗后的数据进行标准化处理,并按照一定时间步长划分时间窗得到时间序列交通数据,进而得到由一定数量的时间序列交通数据构成的时间序列交通数据集。
11、时间序列交通数据表示每个检测站的在每个时间步ti(其中)的特征向量,对于集合中的每个元素f为交通状态指标的数量,所述交通状态指标包括占有率、流量以及平均车速等。
12、将历史路网道路信息处理为有向图交通延误惩罚矩阵和外界交通流量矩阵ε,将有向图交通延误惩罚矩阵和外界交通流量矩阵ε进行标准化后与时间序列数据集一起作为训练集和验证集;其中,为有向图中n个顶点的集合,表示路网上所有检测点,n为顶点编号,vn为路网上第n个检测点;为有向图中s个从vi到vj的有向边集合,表示路网上检测点间的可达关系(可达关系表示有方向的路径。),i、j皆为顶点编号,i≠i;表示有向图中s个从vi到vj的可达条数,s表示集合ψ中的元素个数;为成本邻接矩阵,为从vi到vj的通行成本权重;交通延误惩罚矩阵为指由于从vi到vj的有向边上交叉路口或匝道引起的交通延误;外界交通流量矩阵为指路网以外的交通流对vi到vj的有向边的影响。
13、结合第一方面,进一步地,数据清洗包括查找缺失值并填充、剔除数据噪声和异常值。
14、结合第一方面,进一步地,所述路网道路信息包括路网中各检测点的位置坐标、检测点间的可达关系以及距离、检测点间的路径上是否存在路网外交通流汇入和流出信息。
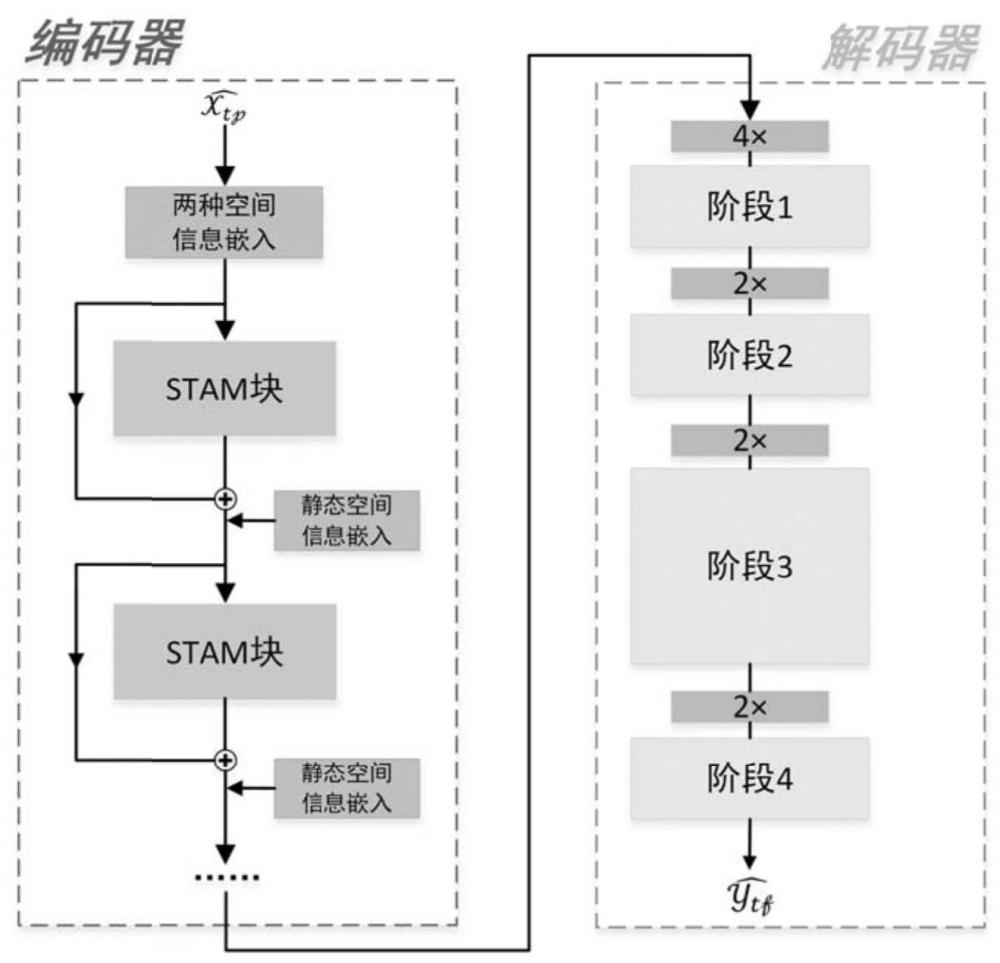
15、结合第一方面,进一步地,所述基于编码器-解码器架构和有向图的时空嵌入注意力网络模型的构建方法为:
16、在编码器阶段,将预处理后得到的时间序列交通数据分别通过静态空间信息嵌入处理和动态空间信息嵌入处理;经过嵌入处理后的交通数据输入时空注意力记忆块(stam block,spatio-temporal attention memory block),得到输出h(1);h(1)通过残差连接防止梯度消失,并再次通过静态空间信息嵌入,强化时空嵌入注意力网络模型对空间信息的捕捉和学习,得到下一个时空注意力记忆块的输入交通数据共有l个时空注意力记忆块通过上述方式连接,得到最后的编码器输出h(l),其中l为超参数;编码器中相邻时空注意力记忆块间的连接计算过程为:
17、
18、其中,和为第m和第m+1个时空注意力记忆块的输入交通数据,m=1,2,…,l,;wm和为可学习的模型参数,实现维度变换;h(m)为第m个时空注意力记忆块的输出;为静态空间信息嵌入,l为超参数,为设定值;
19、在解码器阶段,将编码器最终提取出的特征h(l)输入unireplknet-s架构,生成全路网多步的短期交通流预测结果。
20、结合第一方面,进一步地,在所述时空嵌入注意力网络模型中,所述静态空间信息嵌入处理包括:
21、通过计算路网中每条的距离,得到表示主要通行成本的成本邻接矩阵考虑到带有交叉口或匝道的会造成额外的延误,从而增加该边的通行成本,因此引入了交通延误惩罚矩阵其中表示的交通延误信息通过非线性全连接层学习并添加到主要通行成本中;静态空间依赖关系通过卷积层实现信息嵌入;静态空间信息嵌入表示为:
22、
23、其中,为未经过拼接处理的静态空间信息嵌入,wc和bc为可学习的模型参数,代表卷积操作,pf为超参数;和代表不同的非线性变换操作,用下式表示(以下提到的非线性变换操作均适用):
24、f(x)=relu(ωx+b)
25、其中,ω和b都是可学习的模型参数,且在不同的非线性变换操作中为不同的参数;relu是一种常见的激活函数;
26、将个sesta拼接成一个向量将其作为输入时空嵌入注意力网络模型的静态空间信息嵌入:
27、
28、其中,为时间步长,表示输入时空嵌入注意力网络模型的静态空间信息嵌入。
29、结合第一方面,进一步地,在所述时空嵌入注意力网络中,所述动态空间信息嵌入包括:
30、将个时间步长中路网所有顶点的交通数据通过静态空间信息嵌入处理后;考虑到有向图所代表的路网和单向交通流信息并不全面,外界的交通流会汇入并流出所构建的有向图,用外界交通流量矩阵ε表示外界的交通流;将和ε融合后,与邻接矩阵一起输入基于有向图的图卷积层,以学习每个时间步的动态空间信息:
31、将个外界交通流量矩阵ε拼接为
32、
33、其中,表示个矩阵ε拼接成的一个张量作为动态空间信息嵌入结构的其中一个输入信息;
34、将输入的交通数据的特征维度转换成pf;将与非线性变换后的交通数据求和,再与外界交通流量融合获得
35、
36、其中,为图卷积层的输入交通信息矩阵;fpf(·)和fdyn(·)代表不同的非线性变换操作;接下来,将通过基于有向图的图卷积层进行处理;
37、
38、其中,为动态空间信息嵌入的输出;w(2)和w(1)为可学习的模型参数;σ为激活函数;为带有自连接的邻接矩阵,表示为(a为邻接矩阵,i为单位矩阵);是的度矩阵,表示为i和j为有向图中顶点的编号;
39、第一个时空注意力记忆块的输入被表示为
40、
41、
42、其中,wo和o为可学习的模型超参数。
43、结合第一方面,进一步地,在所述时空嵌入注意力网络中,所述时空注意力记忆块包括:
44、时空注意力记忆块提出了一种基于双向长短期记忆神经网络(lstm,long short-term memory)的时空注意力机制:将正向lstm单元输出的前一细胞状态和隐藏状态在当前时间步tc嵌入空间信息的交通数据以及时间周期信息输入时空注意力单元,其中h为超参数。时空注意力单元能学习各时间步之间的时空相关性,并将其输出作为当前时间步tc的正向lstm单元的输入(反向lstm同理)。正向和反向使用独立的时空注意力单元参数和lstm参数,并向两个不同的方向传播,以捕捉数据中的时空特征。时空注意力记忆块的结构表示为:
45、
46、其中,表示上一时间步与当前时间步之间的正向时空相关性;为正向lstm单元输出的前一细胞状态,为正向lstm单元输出的隐藏状态,tc为当前时间步,为在当前时间步tc嵌入空间信息的交通数据,h为超参数;fq(·)和fk(·)表示不同的非线性变换操作;指张量的拼接操作;"*"指矩阵的内积;代表维度转换操作,适应矩阵相乘;(·)τ代表矩阵转置操作;分母中的m为分式的分子最后一个维度大小,m=n,操作能有效避免维度过大影响到数值稳定性;指作用于最后一个维度的softmax函数,用于计算时空相关性权重;是teout向量的第tc个元素,teout为时间周期信息嵌入,旨在增强模型识别和学习每个时间步在周期中的相对时间的能力,计算方式如下:
47、
48、其中,fte(·)为非线性变换操作;表示每个时间步t的周期信息,计算方式如下:
49、
50、其中,δ<·>和θ<·>分别代表函数sin2π(·)和cos2π(·);(n)指每个正弦和余弦函数的维度为n;表示当前时间步在一天中的时间,表示当前时间步在一周中的第日数,即:(ttod取决于各检测点收集交通数据的统计周期,如统计周期为5min,则ttod=24*60/5=288),tsdow=1,2,…,7。
51、
52、
53、其中,fv(·)为非线性变换操作;代表时空注意力单元在tc时间步的输出,与前一时间步的细胞状态和隐藏状态一起被输入到正向lstm单元,以获取当前时间步的和kf为超参数;
54、反向的结构与正向相同;将两个方向上,每个时间步的lstm单元输出的隐藏状态分别拼接为向量和hf表示正向时每个时间步的lstm单元输出的隐藏状态拼接的向量,hb表示反向时每个时间步的lstm单元输出的隐藏状态拼接的向量;通过设计一种门控融合机制来控制双向各自的信息权重,作为时空注意力记忆块的输出;其中,门控使用多层感知机计算得到:
55、
56、
57、其中,为时空注意力记忆块的输出;⊙指矩阵的元素乘积操作;sigmoid[·]指sigmoid函数;fhf(·)和fhb(·)为不同的非线性变换操作;wf、wb和bfb是可学习的模型参数。
58、第二方面,本发明提供一种基于有向图时空信息嵌入的交通流预测系统,包括:
59、交通数据采集模块,被配置用于采集实时时间序列交通数据;
60、模型预测模块,被配置用于将采集的实时时间序列交通数据输入预先训练好的基于编码器-解码器架构和有向图的时空嵌入注意力网络模型中进行预测,端到端生成全路网多步的短期交通流预测结果;
61、其中,所述时空嵌入注意力网络模型的训练过程为:
62、采集路网中各道路的检测站历史单向交通数据和历史路网道路信息,并对采集的检测站历史单向交通数据和历史路网道路信息进行预处理,得到训练集和验证集;
63、使用所述训练集和设定初始超参数来训练所述时空嵌入注意力网络模型,通过所述验证集来调整时空嵌入注意力网络模型的超参数。
64、第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现上述的基于有向图时空信息嵌入的交通流预测方法的步骤。
65、第四方面,本发明提供一种计算机设备,包括:
66、存储器,用于存储计算机程序;
67、处理器,用于执行所述计算机程序以实现上述的基于有向图时空信息嵌入的交通流预测方法的步骤。
68、第五方面,本发明提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的基于有向图时空信息嵌入的交通流预测方法的步骤。
69、与现有技术相比,本发明所达到的有益效果:
70、(1)本发明能够更好的帮助交通管理部门和个体驾驶者应对复杂多变的交通环境,提高路网交通效率。
71、(2)本发明的交通流预测方法提出了一种用于短期交通预测的时空嵌入注意力网络:将路网中的相关信息和单向交通流抽象为有向图,解决了无法获取路网中所有车辆的完整交通统计数据;通过一种空间(动态和静态)信息和时间周期信息嵌入方法,有效增强了模型的学习能力;设计了一种基于注意力机制和双向lstm的时空注意力记忆块,更有效地捕捉了时空交通数据特征,输入解码器生成预测。
72、(3)本发明的交通流预测方法实现了数据采集不完整的情况下交通时空数据预测的一种全新思路,对基于数据时空特征挖掘的时间序列预测提供一种全新视角,加强了智能交通系统和管理部门对于交通时空数据以及实时交通流状态的理解,为行车路径规划、交通信号控制等应用领域给予支持。
73、(4)本发明的交通流预测方法通过设计端到端的交通流预测模型,为智能交通系统等应用领域提供了一种全新的交通流预测方式,优化一系列交通通行效率问题。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188678.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表