一种智能网联车队形成控制方法、计算装置、存储介质和车辆
- 国知局
- 2024-07-31 21:10:43
本发明涉及智能网联车队形成控制,具体为一种智能网联车队形成控制方法、计算装置、存储介质和车辆。
背景技术:
1、随着无线通信技术和汽车产业的发展,以智能网联汽车为代表的车路协同自动驾驶技术受到了越来越多的重视。智能网联车不仅可以通过先进的传感器感知周围环境信息,还能够以精确的控制系统来减少由人为驾驶失误而造成的交通事故和交通堵塞。同时,cacc(cooperative adaptive cruise control)技术能够使多个智能网联车以更加紧密的方式形成车队,车队中成员以相同的速度移动,有效提高道路通行能力,并且减小尾气排放和能源损耗。
2、然而,智能网联车的大规模普及仍有诸多阻扰,由智能网联车和人工驾驶车组成的混合交通流在未来将长期存在。智能网联车在跟随人工驾驶车行驶过程中会由cacc系统控制退化至acc(adaptive cruise control)系统控制,致使通行效率、稳定性和安全性的下降。此外,过长的车队在面对由人工驾驶员引起的突发状况时,也会由于车辆间行驶过于紧密而引发安全风险。
3、目前针对智能网联车队形成过程控制方法中,每个车辆的决策流程相对独立,存在发生车队成员决策冲突和车队长度过长的可能。同时,决策控制算法通常需要过长的计算时间,影响控制方案的实时性。
技术实现思路
1、本发明要解决的技术问题是针对上述现有技术的不足,提供一种智能网联车队形成控制方法,包括以下步骤:
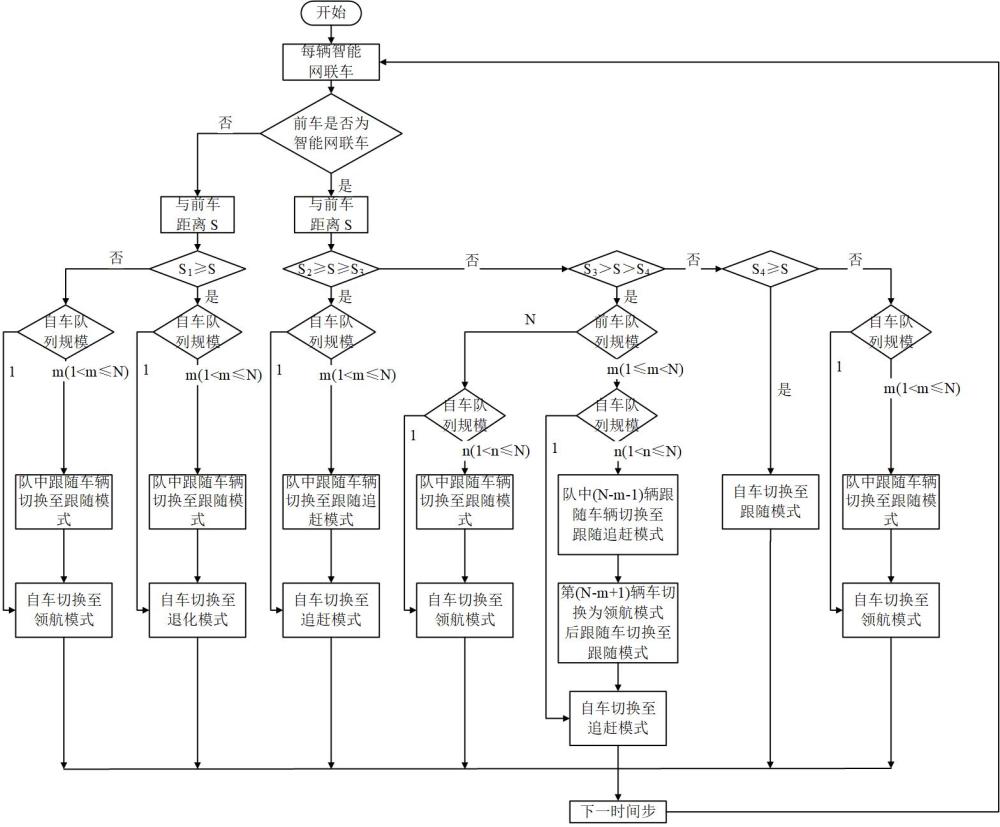
2、s1、获取前车信息,包括前车车辆类型及前车与自车的相对距离s,前车车辆类型包括人工驾驶车辆和智能网联车辆。若前车为人工驾驶车辆,转至步骤s2。若前车为智能网联车辆,转至步骤s3。
3、s2、若与前车相对距离s大于等于s1,自车切换至领航模式,若自车所在车队中存在跟随车辆,则跟随车辆切换至跟随模式。若与前车相对距离s小于s1,自车切换至退化模式,若自车所在车队中存在跟随车辆,则跟随车辆切换至跟随模式。s1为前车为人工驾驶车辆时,智能网联车辆发生功能退化的预设距离。
4、s3、若与前车相对距离s大于s2,自车切换至领航模式,若自车所在车队中存在跟随车辆,则跟随车辆切换至跟随模式。若与前车相对距离小于等于s2且大于等于s3,自车切换至追赶模式,若自车所在车队中存在跟随车辆,则跟随车辆切换至跟随追赶模式。若与前车相对距离小于等于s4,自车切换至跟随模式。若与前车相对距离小于s3且大于s4,判断前车队列规模m和车队最大规模n的大小关系,若前车队列规模等于n,自车切换至领航模式,若自车所在车队中存在跟随车辆,则跟随车辆切换至跟随模式。若前车队列规模小于n,则自车切换至追赶模式,若自车所在车队中存在跟随车辆,则自车所在车队后方(n-m-1)辆跟随车辆切换至跟随追赶模式,若自车车队第(n-m)辆跟随车辆后方仍存在跟随车辆,则自车所在车队中第(n-m+1)辆跟随车辆切换至领航模式,若自车所在车队中第(n-m+1)辆跟随车辆后方仍存在跟随车辆,则跟随车辆切换至跟随模式。s2、s3、s4为智能网联车前车同为智能网联车时,智能网联车辆发生模式切换的追赶阈值、领航阈值和跟随阈值。
5、退化模式表示,智能网联车作为车队中头车,前车为人工驾驶车时,因人工驾驶车辆驾驶行为的随机性和不确定性,为了确保安全而所执行的较大跟车间距模式。领航模式表示,智能网联车作为车队中头车,前方无车辆或前车为达到队列最大规模的车队尾车时,为了保证通行效率以及不同车队之间的距离而所采取的模式。跟随模式表示,当队列头车的驾驶模式为领航模式或退化模式时,为了维持队列内部较小的间距,同一车队中非头车所执行的较小跟车间距模式。追赶模式表示,智能网联车作为车队中头车,前车为智能网联车且前车所在车队未达到队列最大规模时,为了缩小与前车间距,尽快与前车形成新的车队而所执行的高车速模式。跟随追赶模式表示,当队列头车的驾驶模式为追赶模式时,为了维持队列内部较小的间距和车队稳定,同一车队中非头车所执行的高车速、较小跟车间距模式。
6、通过上述对智能网联车辆车队跟车模式的切换,在保证车队成员的决策控制保持一致的前提下,基于车队形成过程规则进行车辆驾驶模式控制,保证控制方案的实时性和准确性。
7、优选的,智能网联车辆通过车上的传感器和车车通讯设备采集前车车辆类型及前车与自车的相对距离s,并将当前时刻的实时信息传输至车队形成控制器,由车队形成控制器控制车辆模式。
8、优选的,s1设置为250-350m。
9、优选的,s2设置为100-140m。
10、优选的,s3=vmaxhleading,s4=vmaxhfollowing,其中vmax为车辆的最大速度,hleading为领航模式期望车头时距,hfollowing为跟随模式期望车头时距。
11、优选的,hleading设置为0.9-1.1s。
12、优选的,hfollowing设置为0.5-0.7s。
13、本发明还提供一种计算装置,包括处理器以及存储器,存储器其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行上述的方法。
14、本发明还提供一种非暂时性机器可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行上述的方法。
15、本发明还提供一种车辆,车辆使用上述的方法。
16、本发明基于车辆自身与其周围车辆的运行状态信息和车辆信息进行控制,兼顾了自车与其所在车队后车,保证了控制逻辑的准确性。
17、本发明基于车队形成过程规则,将智能网联车队的形成分解为不同阶段,针对处于不同位置和阶段的车辆,细化其驾驶模式,促进了车队形成,同时避免了车队规模过大的现象。
18、本发明控制规则考虑了车队形成、车队拆分和车队重组等多种车队操作过程,具有完备性。
技术特征:1.一种智能网联车队形成控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的智能网联车队形成控制方法,其特征在于,智能网联车辆通过车上的传感器和车车通讯设备采集前车车辆类型及前车与自车的相对距离s,并将当前时刻的实时信息传输至车队形成控制器,由车队形成控制器控制车辆模式。
3.根据权利要求1所述的智能网联车队形成控制方法,其特征在于,s1设置为250-350m。
4.根据权利要求1所述的智能网联车队形成控制方法,其特征在于,s2设置为100-140m。
5.根据权利要求1所述的智能网联车队形成控制方法,其特征在于,s3=vmaxhleading,s4=vmaxhfollowing,其中vmax为车辆的最大速度,hleading为领航模式期望车头时距,hfollowing为跟随模式期望车头时距。
6.根据权利要求5所述的智能网联车队形成控制方法,其特征在于,hleading设置为0.9-1.1s。
7.根据权利要求5所述的智能网联车队形成控制方法,其特征在于,hfollowing设置为0.5-0.7s。
8.一种计算装置,其特征在于:包括处理器以及存储器,存储器其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如权利要求1-7任一所述的方法。
9.一种非暂时性机器可读存储介质,其特征在于:其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-7任一所述的方法。
10.一种车辆,其特征在于:车辆使用如权利要求1-7任一所述的方法。
技术总结本发明提供一种智能网联车队形成控制方法,包括以下步骤:S1、获取前车信息,包括前车车辆类型及前车与自车的相对距离S。S2、若与前车相对距离S大于等于S<subgt;1</subgt;,自车切换至领航模式。若与前车相对距离S小于S<subgt;1</subgt;,自车切换至退化模式。S3、若与前车相对距离S大于S<subgt;2</subgt;,自车切换至领航模式。若与前车相对距离小于等于S<subgt;2</subgt;且大于等于S<subgt;3</subgt;,自车切换至追赶模式。若与前车相对距离小于等于S<subgt;4</subgt;,自车切换至跟随模式。若与前车相对距离小于S<subgt;3</subgt;且大于S<subgt;4</subgt;,判断前车队列规模m和车队最大规模N的大小关系,继而确定跟车模式。本发明在保证车队成员的决策控制保持一致的前提下,基于车队形成过程规则进行车辆驾驶模式控制,保证控制方案的实时性和准确性。技术研发人员:曲栩,杜若愚,李林恒,王昊受保护的技术使用者:东南大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240731/188719.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表