一种船舶水路航行风险预警方法及系统
- 国知局
- 2024-07-31 21:12:44
本发明涉及船舶航行,具体的,涉及一种船舶水路航行风险预警方法及系统。
背景技术:
1、随着经济全球化不可阻挡的趋势及水上交通运输行业的不断发展,水运的地位和作用逐渐提升,越来越多的船舶被投放到水运中以满足运输的需求,与此同时,随着参与水运的船舶数量的增多及复杂的通航环境,船舶的航行水域变得拥挤,船舶间的冲突碰撞变得频繁,水上交通事故时有发生。
2、实时航行风险与历史航行冲突风险结合是目前船舶安全风险预警的发展趋势,但是由于水上交通事故发生的频率相对较少,技术人员无法获取大量的数据基础用于进行历史风险的总结,导致结合历史航行冲突风险进行预警的技术缺乏充足的理论支撑,进而使得风险预警的精准度比较低。
3、目前,传统的实时航行风险预警方法主要基于船载雷达掌握其他船舶的实时动态信息,但船载雷达仍存在易受到外界环境影响及识别精度不高的缺陷,在进行船舶的碰撞检测常使用距离、时间或其他相关的指标作为判断条件,其算法有安全角度算法、安全区域算法、安全距离算法、碰撞时间算法和数据挖掘等,但是安全距离算法、安全角度算法和安全区域算法只能针对直线碰撞的问题;数据挖掘方法需建立知识库;碰撞时间算法虽能解决各个方向的碰撞问题,但是算法复杂、运算代价大,往往需要较高的时间成本进行风险测算,无法及时的对船舶当前的航行风险进行预警。
技术实现思路
1、为了解决上述技术问题,本发明公开了一种船舶水路航行风险预警方法及系统,用于提高航行风险预警的精准度和及时性。
2、为了实现上述目的,本发明公开了一种船舶水路航行风险预警方法,包括:
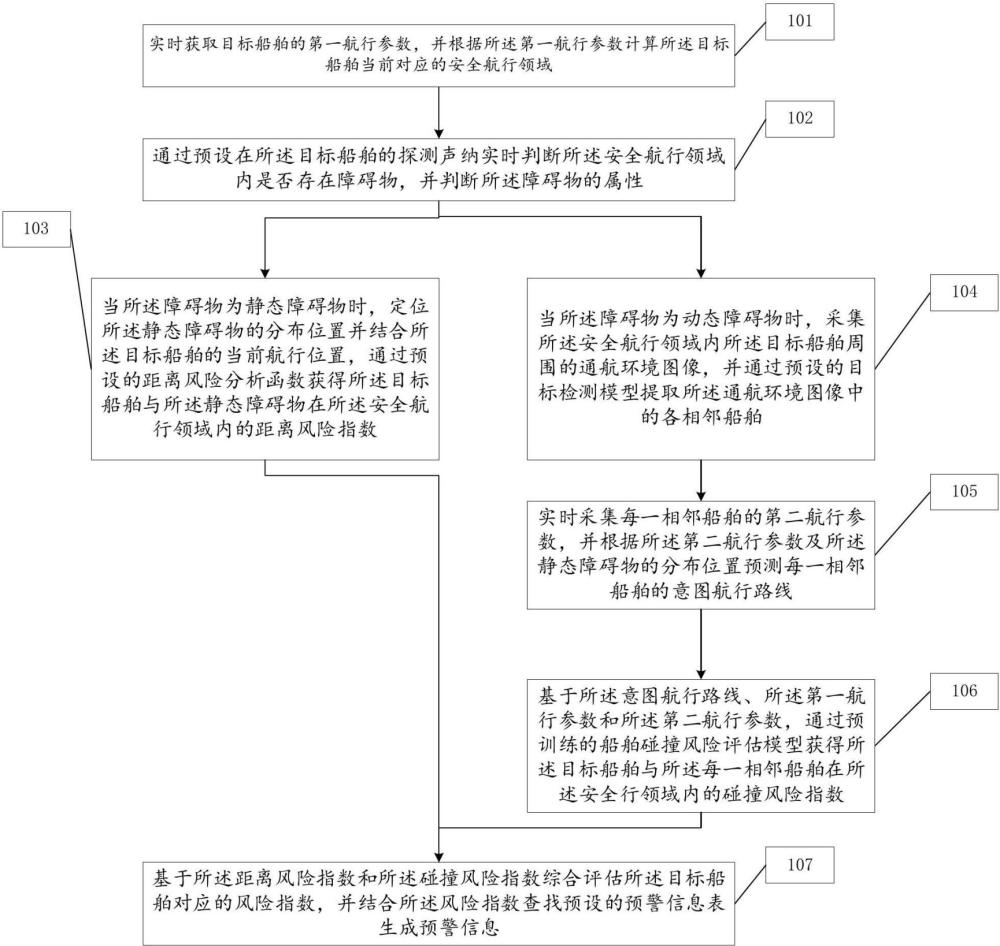
3、实时获取目标船舶的第一航行参数,并根据所述第一航行参数计算所述目标船舶当前对应的安全航行领域;
4、通过预设在所述目标船舶的探测声纳实时判断所述安全航行领域内是否存在障碍物,并判断所述障碍物的属性;
5、当所述障碍物为静态障碍物时,定位所述静态障碍物的分布位置并结合所述目标船舶的当前航行位置,通过预设的距离风险分析函数获得所述目标船舶与所述静态障碍物在所述安全航行领域内的距离风险指数;
6、当所述障碍物为动态障碍物时,采集所述安全航行领域内所述目标船舶周围的通航环境图像,并通过预设的目标检测模型提取所述通航环境图像中的各相邻船舶;
7、实时采集每一相邻船舶的第二航行参数,并根据所述第二航行参数及所述静态障碍物的分布位置预测每一相邻船舶的意图航行路线;
8、基于所述意图航行路线、所述第一航行参数和所述第二航行参数,通过预训练的船舶碰撞风险评估模型获得所述目标船舶与所述每一相邻船舶在所述安全航行领域内的碰撞风险指数;
9、基于所述距离风险指数和所述碰撞风险指数综合评估所述目标船舶对应的风险指数,并结合所述风险指数查找预设的预警信息表生成预警信息。
10、本发明公开的一种船舶水路航行风险预警方法,首先利用目标船舶当前的航行参数划分一定范围内的安全航行领域,进而对船舶在航行时的每一刻进行风险的实时预警,提高风险预警的及时性,接着利用声纳探测技术识别障碍物的存在情况,解决现有技术中雷达易受干扰且精准度不高的技术问题,提高障碍物识别的精准度,进而提高风险预警的精准度。
11、在声纳识别到障碍物后,对障碍物的属性进行识别,以使根据障碍物的属性进行不同风险的预测,进一步提高风险预警的精准度,在本发明中,当识别到障碍物为静态时,利用预设的距离风险分析参数评估船舶与所述静态障碍物的距离风险参数,当识别到障碍物为动态时,考虑到船舶间的碰撞,本发明通过采集目标船舶周围环境内的环境图像,以此确定较有可能发生碰撞的位于安全航行区域内的相邻船舶,由此减少数据的处理量,提高风险预警的及时性。
12、通过采集相邻船舶的航行参数,并根据所述第二航行参数及所述静态障碍物的分布位置预测相邻船舶的意图航行路线,进而根据所述意图航行路线和预训练的风险评估模型获得船舶间的碰撞风险指数,最终结合所述距离风险指数和所述碰撞风险指数进行风险的预警,可提高风险预警的精准度。
13、作为优选例子,在所述实时获取目标船舶的第一航行参数,并根据所述第一航行参数计算所述目标船舶当前对应的安全航行领域,包括:
14、实时获取所述目标船舶当前的第一航向速度及第一船舶长度;其中,所述第一航行参数包括所述目标船舶对应的第一航行速度、第一船舶长度及第一航行方向;
15、根据所述第一航行方向及预设的领域规划方式构建所述安全航行领域,并根据所述第一航行速度及所述第一船舶长度计算所述安全航行领域对应的长半轴和短半轴;
16、根据所述长半轴及所述短半轴,通过所述领域规划方式对应的面积计算公式确定所述安全航行领域。
17、本发明根据船舶在航行过程中的实际情况,利用椭圆规划方式构建船舶在航行过程中需要的安全航行领域,通过所述安全航行领域的构建提高风险预警的及时性,进一步的,为了实现风险预警的实时性及所述安全航行领域构建的精准度,通过实时获取目标船舶在航行过程中的航行参数即船舶长度及航行速度进行领域的计算。
18、作为优选例子,在所述通过预设在所述目标船舶的探测声纳实时判断所述安全航行领域内是否存在障碍物,并判断所述障碍物的属性,包括:
19、根据预设在所述目标船舶的多波束前视声纳持续采集所述安全航行领域内的障碍物信息,并根据所述障碍物信息计算所述障碍物相对于所述目标船舶的方位及距离;
20、根据所述方位及距离检测所述障碍物的动态信息,当所述障碍物相对于目标船舶的距离与所述目标船舶的第一航行速度成负相关的线性关系时,判定所述障碍物为静态障碍物;
21、当所述障碍物相对于目标船舶的距离与所述目标船舶的第一航行速度不成负相关的线性关系时,判定所述障碍物为动态障碍物。
22、本发明考虑到通航环境的复杂性,即船舶在遇到静态障碍物与动态障碍物时所遭遇到的风险是不同的,由此为了提高风险预警的精准度,需要先对障碍物的动态或静态属性进行判定,以使后续根据所述判定的结果判断不同种类的障碍物对目标船舶的航行造成的风险,进而综合不同障碍物造成的航行风险进行预警,提高风险预警的精准度。
23、作为优选例子,在所述通过预设的距离风险分析函数获得所述目标船舶与所述静态障碍物在所述安全航行领域内的距离风险指数,包括:
24、以所述目标船舶的当前航行位置为原点构建二维坐标系,并根据每一个静态障碍物的分布位置计算所述每一个静态障碍物在所述二维坐标系中的坐标值;
25、根据所述坐标值代入预设的距离计算公式计算每一个静态障碍物与所述目标船舶的当前航行位置在所述二维坐标系中的距离;
26、将所述距离代入预设的距离风险分析函数获得所述目标船舶与所述每一个静态障碍物对应的距离风险指数。
27、本发明为了降低在进行风险预警时需要处理的数据量,提高风险预警的及时性,默认判定的静态障碍物对船舶的航行造成风险,由此避免对静态障碍物进行外观识别时造成的数据处理时间,由此只通过对静态障碍物与船舶之间的距离风险进行评估,即可实现静态障碍物对目标船舶的航行造成的风险的预警,提高预警的及时性。
28、作为优选例子,在所述采集所述安全航行领域内所述目标船舶周围的通航环境图像,并通过预设的目标检测模型提取所述通航环境图像中的各相邻船舶,包括:
29、根据部署在所述目标船舶上的多个高清图像采集装置实时获取所述目标船舶周围的通航环境图像;其中,每一个高清图像采集装置包括高清摄像机和红外摄像机;所述通航环境图像包括高清实景图像和航行红外图像;
30、根据预设的特征权重融合法将每一张通航环境图像中的高清实景图像和航行红外图像进行融合,获得通航环境融合图像;
31、将每一张通航环境融合图像输入至预训练的目标检测模型,通过所述目标检测模型的第一网络对所述通航环境融合图像进行切片处理,获得单个格网的目标分割结果;
32、根据各个格网的目标分割结果,通过所述目标检测模型的第二网络实时计算所述单个格网对应的二值的掩图,并使用预设在所述第二网络中的轮廓跟踪公式获得所述各个格网的轮廓坐标;
33、根据所述各个格网的轮廓坐标,通过预设在所述目标检测模型的全连接层将每个格网的轮廓坐标进行空间叠加,并把相邻格网重叠的部分融合,输出所述每一张通航环境中对应的相邻船舶。
34、本发明为了解决因雷达易受干扰且精准度不高而造成的障碍物检测准度不高的技术问题,由此采用在船舶上部署高清摄像机和红外摄像机进行图像采集进而实现船舶的目标检测,通过所述高清摄像机和红外摄像机的结合提高图像采集的精度,进而提高目标检测的精度,接着,本发明利用预训练的目标检测模型对所述融合了高清实景图像与热外图像的航行图像进行目标检测,所述模型的算法简单,运算代价小,在降低风险预警的时间成本时提高相邻船舶的检测的精准度,进而提高风险预警的精准度。
35、作为优选例子,在所述根据所述第二航行参数及所述静态障碍物的分布位置预测每一相邻船舶的意图航行路线,包括:
36、采集每一相邻船舶对应的第二航行参数,并确定所述每一相邻船舶对应的若干个第一意图航行路线;其中,所述第二航行参数包括第二航行方向和第二航行速度;所述第一意图航行路线包括直行航行路线、左转航行路线及右转航行路线;
37、对于每一第一意图航行路线,计算该相邻船舶在该第一意图航行路线上按照所述第二航行速度航行预设时长内的第一行驶区域,并根据所述第一行驶区域及所述静态障碍物的分布位置,判定所述第一行驶区域与所述分布位置是否发生重合,若重合,则将该第一意图航行路线删除;
38、根据所述第二航行方向,计算剩余的每一第一意图航行路线与所述目标船舶的第一航行方向的夹角,并根据所述夹角对剩余的每一第一意图航行路线分别进行打分,将得分最高的第一意图航行路线作为该相邻船舶的意图航行路线。
39、本发明首先确定相邻船舶所有的可能航行路线,并采集相邻船舶的航行参数,以使根据所述航行参数对所述可能航行路线进行筛选,在筛选过程中,首先考虑到相邻船舶会避开障碍物,由此利用所述采集的障碍物的分布位置进行意图航线的初步筛选,接着考虑到所述相邻船舶会避开目标船舶,由此,利用航线的夹角对筛选后剩余的每一意图航线进行打分,然后将得分最高的作为最有可能的意图航线,由此提高路线预测的精准度,进而提高风险预警的精准度。
40、作为优选例子,在所述通过预训练的船舶碰撞风险评估模型获得所述目标船舶与所述每一相邻船舶在所述安全航行领域内的碰撞风险指数之前,包括:
41、获取预构建的碰撞事故数据库中的每对航行轨迹对相关的历史航行路线、历史航行参数及历史碰撞风险指数,以使根据所述历史航行路线、历史航行参数及历史碰撞风险指数对待训练的船舶碰撞风险评估模型进行训练,得到已训练的第一船舶碰撞风险评估模型;
42、根据所述目标船舶所在的水域,确定模型调整参数,并根据所述模型调整参数调整所述已训练的第一船舶碰撞风险评估模型,得到所述预训练的船舶碰撞风险评估模型。
43、本发明利用所述根据预设的碰撞事故数据库及目标船舶所处的水域而构建船舶碰撞风险评估模型,可使得船舶碰撞风险评估模型充分学习碰撞事故数据库中所存储的各个历史数据,并在应用该船舶碰撞风险评估模型时,将与目标船舶相关的航行信息均作为该船舶碰撞风险评估模型的输入数据,不仅考虑了相邻船舶对目标船舶的影响,而且还考虑到了环境因素对目标船舶的影响,以此提升船舶碰撞风险的评估准确度,进而提高风险预警的精准度。
44、作为优选例子,在所述基于所述距离风险指数和所述碰撞风险指数综合评估所述目标船舶对应的风险指数,并结合所述风险指数查找预设的预警信息表生成预警信息,包括:
45、通过利用自适应更新的自适应权重对所述每一个静态障碍物对应的距离风险指数和每一相邻船舶对应的碰撞风险指数分别进行加权,进而获得所述目标船舶对应的风险指数;
46、根据所述风险指数确定所述目标船舶的风险等级,以使通过所述风险等级查找预设的预警信息表并向所述目标船舶输出与所述风险等级相关联的预警信息表。
47、本发明考虑到所述风险的不确定性,利用自适应权重分别为所述距离风险指数和所述碰撞风险指数分别进行加权,提高最终生成的风险指数的准确性,进而利用最终获取的风险指数进行风险预警,提高预警的精准度。
48、另一方面,本发明还公开了一种船舶水路航行风险预警系统,包括领域划分模块、属性判定模块、距离风险评估模块、目标检测模块、航线预测模块、碰撞风险评估模块及风险预警模块;
49、所述领域划分模块用于实时获取目标船舶的第一航行参数,并根据所述第一航行参数计算所述目标船舶当前对应的安全航行领域;
50、所述属性判定模块用于通过预设在所述目标船舶的探测声纳实时判断所述安全航行领域内是否存在障碍物,并判断所述障碍物的属性;
51、所述距离风险评估模块用于当所述障碍物为静态障碍物时,定位所述静态障碍物的分布位置并结合所述目标船舶的当前航行位置,通过预设的距离风险分析函数获得所述目标船舶与所述静态障碍物在所述安全航行领域内的距离风险指数;
52、所述目标检测模块用于当所述障碍物为动态障碍物时,采集所述安全航行领域内所述目标船舶周围的通航环境图像,并通过预设的目标检测模型提取所述通航环境图像中的各相邻船舶;
53、所述航线预测模块用于实时采集每一相邻船舶的第二航行参数,并根据所述第二航行参数及所述静态障碍物的分布位置预测每一相邻船舶的意图航行路线;
54、所述碰撞风险评估模块用于基于所述意图航行路线、所述第一航行参数和所述第二航行参数,通过预训练的船舶碰撞风险评估模型获得所述目标船舶与所述每一相邻船舶在所述安全航行领域内的碰撞风险指数;
55、所述风险预警模块用于基于所述距离风险指数和所述碰撞风险指数综合评估所述目标船舶对应的风险指数,并结合所述风险指数查找预设的预警信息表生成预警信息。
56、本发明公开的一种船舶水路航行风险预警系统,首先利用目标船舶当前的航行参数划分一定范围内的安全航行领域,进而对船舶在航行时的每一刻进行风险的实时预警,提高风险预警的及时性,接着利用声纳探测技术识别障碍物的存在情况,解决现有技术中雷达易受干扰且精准度不高的技术问题,提高障碍物识别的精准度,进而提高风险预警的精准度。
57、在声纳识别到障碍物后,对障碍物的属性进行识别,以使根据障碍物的属性进行不同风险的预测,进一步提高风险预警的精准度,在本发明中,当识别到障碍物为静态时,利用预设的距离风险分析参数评估船舶与所述静态障碍物的距离风险参数,当识别到障碍物为动态时,考虑到船舶间的碰撞,本发明通过采集目标船舶周围环境内的环境图像,以此确定较有可能发生碰撞的位于安全航行区域内的相邻船舶,由此减少数据的处理量,提高风险预警的及时性。
58、通过采集相邻船舶的航行参数,并根据所述第二航行参数及所述静态障碍物的分布位置预测相邻船舶的意图航行路线,进而根据所述意图航行路线和预训练的风险评估模型获得船舶间的碰撞风险指数,最终结合所述距离风险指数和所述碰撞风险指数进行风险的预警,可提高风险预警的精准度。
59、作为优选例子,所述领域划分模块包括采集单元、划分单元及构建单元;
60、所述采集单元用于实时获取所述目标船舶当前的第一航向速度及第一船舶长度;其中,所述第一航行参数包括所述目标船舶对应的第一航行速度、第一船舶长度及第一航行方向;
61、所述划分单元用于根据所述第一航行方向及预设的领域规划方式构建所述安全航行领域,并根据所述第一航行速度及所述第一船舶长度计算所述安全航行领域对应的长半轴和短半轴;
62、所述构建单元用于根据所述长半轴及所述短半轴,通过所述领域规划方式对应的面积计算公式确定所述安全航行领域。
63、本发明根据船舶在航行过程中的实际情况,利用椭圆规划方式构建船舶在航行过程中需要的安全航行领域,通过所述安全航行领域的构建提高风险预警的及时性,进一步的,为了实现风险预警的实时性及所述安全航行领域构建的精准度,通过实时获取目标船舶在航行过程中的航行参数即船舶长度及航行速度进行领域的计算。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表