一种智慧停车管理系统的制作方法
- 国知局
- 2024-07-31 21:17:42
本发明涉及智能停车系统领域,尤其涉及一种智慧停车管理系统。
背景技术:
1、智慧园区是指配套设施齐全、布局合理且能够满足从事某种特定行业生产和科学实验需要的标准性建筑物或建筑物群体。例如工业园区、产业园区、物流园区和科技园区等。
2、目前的工业园区域内常堆放大量货物,导致道路被占到,影响车辆的行驶以及停靠,不但占用道路资源,出现道路拥堵,管理混乱。
技术实现思路
1、本发明意在提供一种智慧停车管理系统,其具有能够智能引导车辆停车的优点。
2、为达到上述目的,本发明的基本方案如下:
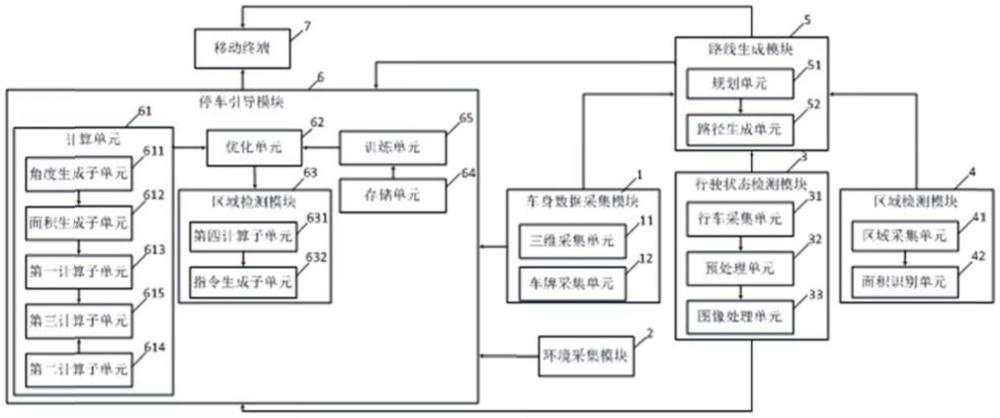
3、一种智慧停车管理系统,包括:
4、车身数据采集模块,设置在工业园区入口,用于采集车辆的车身尺寸数据、车重数据以及车牌信息,并将所述车身尺寸数据、所述车重数据与所述车牌信息相关联;
5、环境采集模块,设置在停车区域,用于实时检测所述停车区域内的道路的表面摩擦系数、环境风向以及环境风速;
6、行驶状态检测模块,设置在所述停车区域,用于实时检测所述车牌信息关联的车辆在所述停车区域中的行驶速度、行驶位置、前车车速以及该车辆与前车的相邻车距;
7、区域检测模块,设置在所述停车区域,所述停车区域被预先划分为行车子区域和停车子区域,用于实时检测所述停车子区域中的剩余停车面积;
8、路线生成模块,分别连接所述车身数据采集模块、所述行驶状态检测模块和所述区域检测模块,用于根据所述车身尺寸数据、所述剩余停车面积和所述行驶位置生成停车路径;
9、停车引导模块,分别连接所述车身数据采集模块、所述环境采集模块、所述行驶状态检测模块和路线生成模块,包括:
10、计算单元,用于根据所述车重数据、所述表面摩擦系数、所述环境风向、所述环境风速处理得到综合干扰加速度;
11、优化单元,连接所述计算单元,用于生成优化预测模型;
12、调整单元,连接所述优化单元,用于将车辆当前时刻的所述停车路径、所述行车速度、所述前车车速和所述相邻车距输入所述优化预测模型,得到下一时刻的预测行车速度和预测相邻车距,并根据所述预测行车速度和所述预测相邻车距生成行车状态修正指令;
13、移动终端,分别连接所述停车引导模块和所述路线生成模块,用于根据所述停车路径引导驾驶者停车,以及根据所述行车状态修正指令提醒所述驾驶者调整行车状态。
14、进一步地,所述车身数据采集模块包括:
15、三维采集单元,用于采集车辆的三维图像,并对所述三维图像分析得到所述车身尺寸数据;
16、车牌采集单元,用于采集车辆前后两面包含有车牌的两张车身图像,并对两张所述车身图像进行车牌图像识别,得到所述车牌信息。
17、进一步地,所述行驶状态检测模块包括:
18、行车采集单元,用于采集所述车牌信息关联的车辆在所述停车子区域内的行车图像和所述行驶速度,以及采集所述前车车速;
19、预处理单元,连接所述行车采集单元,用于对所述行车图像进行预处理,得到行车预处理图像;
20、图像处理单元,连接所述预处理单元,用于对所述行车预处理图像识别得到所述车牌信息关联的车辆的所述行驶位置以及前车位置,根据所述行驶位置、所述前车位置以及所述车身尺寸数据处理得到所述相邻车距。
21、进一步地,所述区域检测模块包括:
22、区域采集单元,用于采集所述停车子区域内的停车图像;
23、面积识别单元,连接所述区域采集单元,用于识别所述停车图像中的空闲面积,并根据预设的停车标准对所述空闲面积进行筛选得到所述剩余停车面积。
24、进一步地,所述路线生成模块包括:
25、规划单元,用于根据所述车身尺寸数据将所述剩余停车面积划分为若干待选泊车位;
26、路径生成单元,连接所述规划单元,用于根据预设的最短路径算法处理处理得到距离所述行驶位置最近的所述待选泊车位,并根据所述行驶位置和所述待选泊车位生成所述停车路径。
27、进一步地,所述停车引导模块还包括:
28、存储单元,用于保存若干历史数据,所述历史数据包括若干车辆上一时刻的历史停车路径、历史行车速度、历史前车车速和历史相邻车距;
29、训练单元,分别连接所述存储单元和所述优化单元,用于引入一初始模型,并将各所述历史停车路径、所述历史行车速度、所述历史前车车速和所述历史相邻车距作为输入,将当前时刻的所述行车速度和所述相邻车距作为输出,对所述初始模型进行训练得到预测模型。
30、进一步地,所述计算单元包括:
31、角度生成子单元,用于对所述行车预处理图像处理得到车辆朝向,进而根据所述环境风向和所述车辆朝向处理得到车辆迎风角度;
32、面积生成子单元,连接所述角度生成子单元,用于根据所述迎风角度、所述车辆朝向和所述三维图像处理得到车辆迎风面积;
33、第一计算子单元,连接所述面积生成子单元,用于根据所述车辆迎风面积和所述环境风速带入预设的风力计算公式,计算得到风向干扰力;
34、第二计算子单元,用于根据所述车重数据、所述表面摩擦系数带入预设的摩擦力计算公式,计算得到滑动摩擦力;
35、第三计算子单元,分别连接所述第一计算子单元和所述第二计算子单元,用于根据所述风向干扰力和所述滑动摩擦力计算得到综合干扰力,进而根据所述综合干扰力处理得到所述综合干扰加速度。
36、进一步地,所述调整单元包括:
37、第四计算子单元,用于根据所述预测行车速度计算得到最短制动距离;
38、指令生成子单元,连接所述第四计算子单元,用于在预测相邻车距与最短制动距离之间的差值不大于预设的制动安全距离时,生成所述行车状态修正指令。
39、与现有技术相比本方案的有益效果是:
40、本发明在工业园区入口采集车辆的车身尺寸数据、车重数据以及车牌信息,在停车区域检测剩余停车面积和车辆的行驶位置,根据车身尺寸数据、剩余停车面积和行驶位置生成停车路径,发送给驾驶者的移动终端,实现智能引导车辆在停车区域内停车,无需停车引导员指引,提升了车辆停车的效率,节省人力成本。
技术特征:1.一种智慧停车管理系统,其特征在于:包括:
2.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述车身数据采集模块包括:
3.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述行驶状态检测模块包括:
4.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述区域检测模块包括:
5.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述路线生成模块包括:
6.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述停车引导模块还包括:
7.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述计算单元包括:
8.根据权利要求1所述的一种智慧停车管理系统,其特征在于:所述调整单元包括:
技术总结本专利申请涉及智能停车系统领域,公开了一种智慧停车管理系统,包括:车身数据采集模块、环境采集模块、行驶状态检测模块、区域检测模块、路线生成模块、停车引导模块以及移动终端;车身数据采集模块用于采集车辆的车身尺寸数据、车重数据以及车牌信息;环境采集模块用于实时检测所述停车区域内的环境数据,行驶状态检测模块用于实时检测所述车牌信息关联的车辆在所述停车区域中行驶状态;区域检测模块用于实时检测所述停车子区域中的剩余停车面积;路线生成模块生成停车路径;移动终端,分别连接所述停车引导模块和所述路线生成模块,用于根据所述停车路径引导驾驶者停车,以及根据所述行车状态修正指令提醒所述驾驶者调整行车状态。技术研发人员:潘雪蓬,张皓天受保护的技术使用者:浙江汇泊停车管理有限公司技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240731/189150.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表