一种低渗透率环境下的多车道交通震荡协同优化控制方法
- 国知局
- 2024-07-31 21:19:34
本发明属于智能交通,具体涉及一种低渗透率环境下的多车道交通震荡协同优化控制方法。
背景技术:
1、在高速公路上的交通震荡波是指在拥堵交通情况下,呈现出来的车辆减速和加速交替出现的起-停波。其通常连续向上游传播,甚至传播数十公里,交通震荡波的传播导致了更高的碰撞概率、交通流量干扰和通行能力下降。一旦交通震荡波形成并向后传递,在高流量的局部交通环境中,这种现象无法自动消散。相反,它会不断向上游传播并蔓延,最终导致局部交通拥堵和瘫痪。随着对交通震荡波现象的深入研究,现已逐渐清楚了其传递的特征。因此,如何减轻震荡波幅度以减缓其向上游传播成为了一个关键的研究问题。
2、近年来,网联自动驾驶车(connected autonomous vehicle,cav)因其卓越的可控性、高效的运行效率和高度智能化的特点,在提高交通效率、促进交通安全以及实现节能减排等方面展现出核心优势和重要研究价值。在未来相当长的时间里,网联自动驾驶车辆的普及过程将经历不断的发展和演进阶段,其中必然涉及到人工驾驶车辆和不同级别自动驾驶车辆的混合交通流。为了充分发挥网联自动驾驶车车辆在节能减排、高效执行和网联协同等方面的优势,并有效利用网联自动驾驶车的驾驶特点来解决当前交通运行中的问题,学术界逐渐重视基于网联自动驾驶车的模型构建、混合交通流的效能分析、网联自动驾驶车单车优化以及联动控制的交通管理方式等研究内容。
3、随着网联自动驾驶车研究的深入,高速公路交通拥堵及交通震荡波的缓解有了新的解决思路,自适应巡航控制(adaptive cruise control,acc)被应用在与前车保持恒定距离以缓解交通震荡波,协同自适应巡航控制(cooperative adaptive cruise control,cacc)将车联网(vehicle-to-vehicle,v2v)通信集成到自适应巡航控制中,以提供有关周围车辆的更多信息,从而更有效地控制车头时距。高级驾驶员辅助系统(advanced driverassistance system,adas)建议降低速度以重新分配流量,从而防止震荡波传播。然而,由于正常车辆的各种超车或变道行为,在cav渗透率较低的现实情况下,由于人工驾驶车辆倾向于进行车道变换以填补交通流中任何可能的间隙,受控车辆与其前车之间保持系统所建议的较大距离很难实现。为解决上述问题,拥堵吸收策略(jam absorption driving,jad)的框架被提出并成功应用于单车道场景,其基本思路是在触发震荡波时选择震荡波上游的一辆网联自动驾驶车提前减速以避免更多上游车辆受下游震荡波影响,从而达到阻断震荡波传播的目的。该策略的关键在于策略实执行车的选取以及减速后的吸波速度的确定。然而,当前的拥堵吸收策略中策略执行车与吸波速度是通过有限次试错性实验确定的,缺乏最优化选择方案。同时在多车道场景下,由于车道上的间隙通常会被其他车辆通过变道超越慢速策略执行车而填补,导致单车道场景下的拥堵吸收策略在多车道公路上实施的效果不佳。因此,在网联自动驾驶车渗透率较低的多车道智能网联场景下,当前仍然需要一种有效的协同优化控制策略,以实现缓解各个车道上交通震荡波传播与影响,提高公路交通安全性能,避免拥堵的发生。
技术实现思路
1、解决的技术问题:本发明提供了一种低渗透率环境下的多车道交通震荡协同优化控制方法,能够解决目前网联自动驾驶车辆低渗透率的混合流交通环境下交通震荡波难以优化控制的技术问题,有效缓解多车道公路上交通震荡波的传播,提高交通安全性,并减少交通干扰。
2、技术方案:
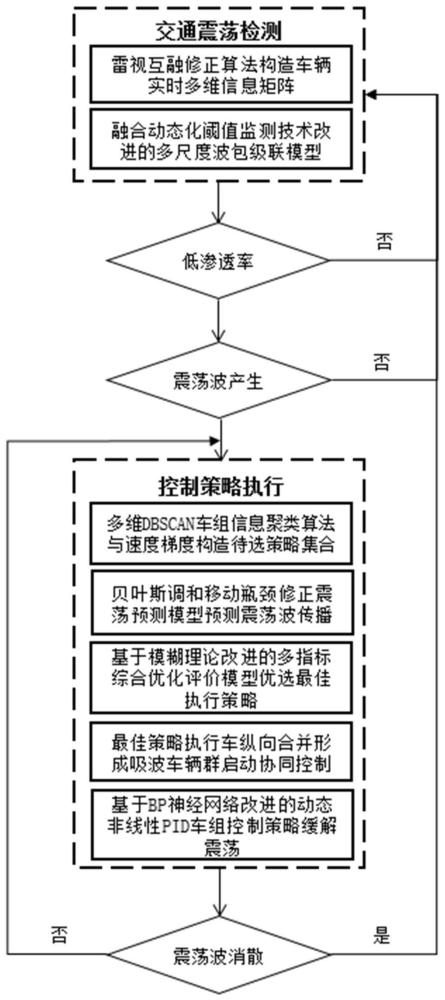
3、一种低渗透率环境下的多车道交通震荡协同优化控制方法,所述协同优化控制方法包括以下步骤:
4、s1、对部署智能网联环境的多车道公路场景,实时向智能网联系统返回路段内渗透率比例,同时构造车辆实时多维信息矩阵,采用雷视互融修正算法对实时多维信息矩阵进行实时监测与修正;
5、s2、融合动态化阈值监测技术构建改进的多尺度波包级联模,当路段内渗透率比例低于预设渗透率比例时,将低渗透率智能网联环境下的多车道公路场景下获取的车辆实时多维信息输入多尺度波包级联模型以追踪车辆间多尺度下的波包能量和动态监测车速,确定交通震荡波起始时刻与起始位置;
6、s3、在低渗透率智能网联环境下,当交通震荡波产生后,采用多维dbscan车组信息聚类算法,在震荡波起始位置向上游动态划定的路段内构造出待选策略执行车组,并根据速度梯度构造出待选策略集合;
7、s4、构建贝叶斯调和移动瓶颈修正震荡预测模型,对策略执行过程中的震荡波传播进行预测,输出震荡波终止时刻和震荡波终止位置的预判结果;
8、s5、基于模糊理论构建改进的多指标综合优化评价模型,基于模糊理论权重值计算同时考虑效率和安全的模糊综合评价函数,以改进的模糊综合评价函数最大化为优化条件对待选策略进行优选,得到最佳策略执行车组、最佳策略执行合并速度以及对应的最佳策略执行吸波速度;
9、s6、通过控制最佳策略执行车组就近换道至目标车道,并由下游至上游依次减速至最佳策略执行合并速度完成依次合并,到达相同的纵向位置,形成并排行驶且覆盖所有车道的吸波车辆群,以最佳策略执行吸波速度启动对后方车流的协同控制;
10、s7、在协同控制开启后,在最佳策略执行吸波速度的基础上构建基于bp神经网络改进的动态非线性pid车组控制策略计算吸波车辆群的动态控制速度,控制车群的前进终点与震荡波终止的时空点位完全重合,对车流与前方道路交通震荡进行规避;
11、s8、吸波车辆群通过震荡波发生路段后,恢复自由流速度进行自由行驶,控制策略返回第一步持续监测新的震荡波的出现。
12、进一步的,步骤s1中的具体方法如下:
13、对部署智能网联环境的多车道公路场景,实时向智能网联系统返回路段内渗透率比例,同时构造车辆实时多维信息矩阵,提出雷视互融修正算法进行实时信息的监测与修正,具体步骤如下:
14、s11、对部署智能网联环境的n车道公路实时更新路段内网联自动驾驶车(connected autonomous vehicle,cav)渗透率,同时构造车辆实时多维信息矩阵如下:
15、mi={loi,lai,vi,ai,hi}
16、其中,loi为第i辆车的经度坐标,lai为第i辆车的纬度坐标,vi为第i辆车的实时车速,ai为第i辆车的实时加速度,hi为第i辆车的车头时距。
17、s12、提出雷视互融修正算法对实时信息进行监控与修正,雷视互融修正算法公式如下:
18、
19、其中,mi(t)为第i辆车在t时刻下的修正多维信息矩阵,cav(mi(t))为第i辆智能网联车辆在t时刻下的精确多维信息矩阵数据,l(cavi)为第i辆智能网联车辆在t时刻下被雷达设备采集到的多维信息矩阵数据,vs(cavi)为第i辆智能网联车辆在t时刻下被视频监控设备采集到的多维信息矩阵数据,为第i辆车在t时刻下被雷达设备采集到的初始多维信息矩阵数据,为第i辆车在t时刻下被视频监控设备采集到的初始多维信息矩阵数据,ε为雷达设备精度系数,ζ为视频监控设备精度系数,n为检测路段内在当前时刻下的智能网联车辆总数。
20、进一步的,步骤s2中的具体方法如下:
21、将低渗透率智能网联环境下的n车道公路场景下获取的车辆实时多维信息输入融合动态化阈值监测技术改进的多尺度波包级联模型以实现车辆间多尺度下的波包能量追踪与动态车速监测,从而确定交通震荡波起始时刻与起始位置。
22、其中多尺度波包级联模型公式如下:
23、
24、
25、
26、式中,ems表示通过多尺度波包级联分析后所得出的级联波包能量值δ,ε,ζ分别代表不同尺度波包的级联系数,wptv(a,b),wpta(a,b),wpth(α,β)分别表示波包维度上针对不同尺度连续信号vi(t),ai(t),hi(t)的连续波包系数,max(a)表示最大缩放系数。
27、在通过以上模型计算各时刻多尺度波包能量值后,锁定能量峰值发生时刻tmaxe。
28、融合动态化阈值监测技术算法,判别能量峰值发生时刻tmaxe对应的震荡头车速度v1是否在动态阈值之下,动态阈值计算公式如下:
29、
30、为动态速度阈值,是车流平均车速,是车流平均加速度,表示车流平均车头时距,k是一个动态调节因子,用于控制平均加速度和平均车头时距对拥堵判断的影响程度。
31、融合动态化阈值监测技术下的震荡波起始时刻与起始位置计算如下:
32、
33、进一步的,步骤s3中的具体方法如下:
34、以震荡波起始位置向上游划定距离为l的策略执行范围,并在此范围内有限的m(m>n)辆cav中提出多维dbscan车组信息聚类算法挑选n辆为组合构成待选策略执行车组k,具体步骤如下:
35、s31、根据不同cav的多维信息矩阵mi计算加权车辆信息间距dij,计算公式如下:
36、
37、其中,ra、rb为信息间距指数权值,a、b为信息间距权重矩阵,αi、βi为量纲权值;
38、s32、引入d作为加权车辆信息间距阈值,当dij≤d时,确定cav之间满足加权车辆信息间距邻近原则,通过多维dbscan车组信息聚类算法对满足加权车辆信息间距邻近原则的cav进行组合构造获得待选策略执行车组k,多维dbscan车组信息聚类算法包括以下步骤:
39、s321、计算多维dbscan车组信息聚类算法的最佳参数,分别为具体时刻对应的车组信息样本领域半径ε、车组信息样本量pts以及最小车组信息样本量minpts的突变值,计算公式如下:
40、
41、
42、minpt=point(distij≤dij)
43、其中d(k)为k维度下的核密度函数,w(k)为k维度下的核密度估计函数,σ为密度参数,λ、μ为维度参数,δ为样本领域半径参数;ρi、ρj分别为数据对象i和j的密度,distij为目标点i与j间的欧氏距离。
44、s322、在车组信息矩阵位置特征维度下进行一维dbscan聚类,获得一次初始聚类簇,计算过程如下:
45、sc1[s(t,n,lok,lak),ε,pts,minpts]=k1(t,n,lopk,lapk)
46、mpi=[xik,yik,vik,aik],i=1,2,...,n
47、其中sc1[s(t,n,lok,lak),ε,pts,minpts]表示在经纬度维度下的车组信息矩阵dbscan聚类过程,s(t,n,lok,lak)表示第k时间窗格下经纬度维度车组集合,g1(t,n,lopk,lapk)表示第第k时间窗格下一维初始聚类簇第p簇车组集合,mpi表示各聚类簇中的第i辆cav的车辆信息矩阵。
48、s323、在车组信息矩阵运动特征维度下进行二维dbscan聚类,获得二次目标聚类簇,计算过程如下:
49、sc2[sp(t,n,,vi,ai),ε,pts,minpts]=k2(t,n,loqk,laqk)
50、mqj=[xjk,yjk,vjk,ajk],j=1,2,...,n
51、其中sc2[sp(t,n,,vi,ai),ε,pts,minpts]表示运动特征维度下的车组信息矩阵dbscan聚类过程,sp(t,n,,vi,ai)表示第k时间窗格下经纬度维度车组集合,g1(t,n,lopk,lapk)表示第第k时间窗格下p簇内运动特征维度的车组集合,mqj表示各聚类簇中的第j辆cav的车辆信息矩阵。
52、s33、针对不同的待选策略执行车组,参考可变限速设计中以速度梯度设置的限速值的原理,从自由流速度u向下以1km/h的梯度设置待选策略执行合并速度v1,该速度用作控制策略执行头车慢速行驶以达到与其他策略执行车相同纵向位置实现策略执行车组合并形成吸波车辆群。待选策略执行车组k与待选策略执行合并速度v1一同构成待选策略集合{(ki,v1j)}。
53、进一步的,步骤s4中的具体方法如下:
54、采用贝叶斯调和移动瓶颈修正的震荡预测模型,对策略执行过程中的震荡波传播进行精确预测,输出震荡波终止时刻和震荡波终止位置的预判结果。
55、s41、考虑n辆策略执行车组合并过程中部分车辆超车对震荡波传播的影响,预测策略执行过程中震荡波的传播。将震荡波起始时刻tstart、该时刻下对应的震荡波上游车辆的纵向位置sstart以及待选策略执行合并速度v1作为移动瓶颈速度输入模型,预测自震荡波起始往后各时刻上游车辆的位置和速度。其中震荡波预测模型的计算公式如下:
56、
57、
58、
59、其中表示自由流状态时的车辆预测纵向位置,表示拥堵状态时的车辆预测纵向位置,vmax表示最大速度,δ=s0+lveh,ξ服从均值为e方差为v2的正态分布,并且其中β为松弛时间的倒数,σ2为离散系数。
60、s42、震荡波的预测还需考虑在策略执行过程中策略执行车组合并过程中部分超越策略执行车的车辆对震荡波传播的影响,将减速合并过程中的策略执行车看作移动瓶颈,采用贝叶斯调和移动瓶颈理论对超车数量进行计算以使得震荡波预测更加准确,其中贝叶斯调和移动瓶颈修正公式如下:
61、
62、
63、
64、其中qr表示超越移动瓶颈的车流量,q表示交通流率,uc表示最大通行能力下的临界车速,uf表示自由流速度,u表示空间平均车速,qc表示道路最大通行能力,ub表示移动瓶颈的速度。λk为经过贝叶斯调和之后的预测权值。
65、由以上贝叶斯调和移动瓶颈修正公式可以推导得出策略执行车组合并过程中超越策略执行车的车辆数n,从而将n辆车的时空信息输入预测模型对原有震荡波传播预测做进一步修正。超越策略执行车的车辆数n的计算公式如下:
66、n=t1qr1+t2qr2+…+tn-1qr(n-1)
67、
68、其中tn-1表示第前n-1辆策略执行车合并后与第n辆策略执行车合并所用时间,qr(n-1)表示前n-1辆策略执行车合并后与第n辆策略执行车合并过程中被超越的车辆数。
69、当完成策略执行车组合并前的最后一辆超车车辆的速度恢复到自由流速度u时,判定震荡波终止,并输出震荡波终止时刻tend和震荡波终止位置en。
70、s43、根据该预测结果计算策略执行吸波速度v2,该速度用作控制吸波车辆群行驶以引导上游车辆与交通震荡波保持较大的间隙其计算公式如下:
71、
72、其中表示在震荡波起始时刻,策略执行头车的纵向位置,en表示在震荡波终止时刻,对应的最后一辆超车车辆纵向位置,ln-1表示策略执行头车与第n辆策略执行车的纵向距离。
73、进一步的,步骤s5中的具体方法如下:
74、在震荡预测的基础上,提出基于模糊理论改进的多指标综合优化评价模型,对多个待选车组计算震荡通过流率与累计碰撞时间,并赋以不同的模糊权重值计算模糊综合评价函数,模糊综合评价函数最大化为优化条件实现待选策略的优选,得到最佳策略执行车组、最佳策略执行合并速度以及对应的最佳策略执行吸波速度,具体步骤如下:
75、s51、计算震荡波起始断面处在划定时段t内的交通流率q,该划定时段一般由震荡传播时段后顺延一定的时间范围,计算公式如下:
76、
77、其中表示对应待选策略下划定的时段t,表示对应待选策略(ki,v1j)下震荡波起始断面处在划定时段t内的交通量。
78、s52、计算路段在划定时段t内的所有车辆的累计碰撞时间tit,计算公式如下:
79、
80、
81、
82、其中碰撞时间ttci(k)表示当车辆i移动速度超过前车辆i-1时,两辆持续以当前速度行驶时发生碰撞所需的时间,其中k为时间步长,l为车辆i-1的长度。累计碰撞时间tit表示低于阈值ttc*的ttc在时间上的累计。
83、s53、将两种评价指标转化为模糊集合,以考虑评价指标的模糊性和不确定性。为两种评价指标(震荡通过流率)分配模糊权重值tra(i),以反映在优选待选策略过程中的相对重要性。由于策略执行吸波速度v2若是小于拥挤速度v0,则可能在吸波车辆群的上游触发新的震荡波,故以v2>v0作为优选策略执行车组与策略执行速度的约束条件,在此约束下,使用模糊加法将两项评价指标的模糊集合进行综合得出模糊综合评价函数如下所示:
84、
85、tra(q)、tra(t)分别为震荡流率、累计碰撞时间两种评价指标分配的模糊权重值,分别为震荡流率、累计碰撞时间两种评价指标的模糊平衡系数,λc={λc1,λc1,…,λck}为震荡流率、累计碰撞时间两种评价指标的重合度特征根,nm表示聚类结果中第m种待选策略的车辆多维信息量。
86、根据各个待选车组的综合评价结果,进行模糊优化,以选择具有最高综合评价的待选车组作为最优策略,包括最佳策略执行车组km、最佳策略执行合并速度v1m以及对应的最佳策略执行吸波速度v2m。
87、进一步的,步骤s6中的具体方法如下:
88、最佳策略执行车组通过换道并依次减速至最佳策略执行合并速度到达相同的纵向位置,形成并排行驶且覆盖所有车道的吸波车辆群以防止后车超车,再以最佳策略执行吸波速度协同控制引导上游车辆与震荡波保持较大的间隙。具体包括以下步骤:
89、s61、最佳策略执行车组纵向合并形成吸波车辆群。当检测到震荡波后,经过步骤s2选中的最佳策略执行车组由纵向位置两两相邻的n辆网联自动驾驶车cav1、cav2、……、cavn(顺序由车流下游到上游依次排列)组成,各策略执行车先就近换道到至不同的n个车道,而后分n-1个阶段进行纵向合并。首先cav1减速至最佳策略执行合并速度v1m控制行驶,与cav2到达相同纵向位置完成合并;在cav1和cav2完成合并后,两车同时以v1m控制行驶,与cav3到达相同纵向位置完成合并,依此类推,直到n辆策略执行车合并完成后形成覆盖所有车道的吸波车辆群cav*。
90、s62、吸波车辆群以最佳策略执行吸波速度控制引导车队。形成吸波车辆群cav*后,同时将策略执行车cav1、cav2、……、cavn的速度从v1m调整为最佳策略执行吸波速度v2m。
91、进一步的,步骤s7中的具体方法如下:
92、在协同控制开启后,在最佳策略执行吸波速度v2m的基础上构建基于bp神经网络改进的动态非线性pid车组控制策略计算吸波车辆群的动态控制速度,控制车群的前进终点与震荡波终止的时空点位完全重合,实现车流与前方道路交通震荡的规避;其中基于bp神经网络改进的动态非线性pid车组控制策略中吸波速度优化方案具体包括以下步骤:
93、s71、确定bp神经网络的基本结构,包括输入节点的数量、隐层节点和输出节点。用初始值初始化加权系数w1ij(0)和w2ij(0)。选择学习率和惯性系数,并设置时间步长δt。
94、s72、采样当前时间步长的输入和输出并计算该时间步长的控制误差e(t)如下:
95、
96、s73、计算bp神经网络中每个神经元的输入和输出。bp神经网络的输出提供了pid控制器的在线可调参数kp,ki,kd
97、s74、计算pid控制策略中吸波速度:
98、
99、其中,v2(t)为t时刻下的动态调整前进速度,为t时刻下的速度增益比例系数,v2(t-1)为向前递推一个时间步长的最佳策略执行吸波速度,v0(t)为t时刻下拥挤车流对应的拥挤速度,δ为速度均衡调整参数,kp为比例增益系数,ki为积分增益系数,kd为微分增益系数。
100、s75、对bp神经网络进行实时学习,调整加权系数w1ij(t)和w2ij(t),实现pid控制参数的自适应调整。
101、有益效果:
102、第一,本发明的低渗透率环境下的多车道交通震荡协同优化控制方法,通过最优化选择的网联自动驾驶车组合在多车道公路上完成纵向合并形成吸波车辆群,并以能有效缓解震荡波传播的吸波速度控制引导上游车辆行驶,较好地缓解多车道公路各车道交通震荡波由下游向上游的传播。
103、第二,本发明的低渗透率环境下的多车道交通震荡协同优化控制方法,可以有效避免人工驾驶车辆在网联自动驾驶车辆渗透率较低情况下因交通震荡波传播所造成的行驶效率与安全性的降低,将传统的单车控制策略拓展到了基于智能网联通信环境下的多车道协同控制,有效解决多车道公路拥堵频发与车辆碰撞问题。本发明为智能网联通信环境中的驾驶参与者提供了安全高效的驾驶环境,同时也为交通决策者进行交通管控方式时提供更好的理论参考依据。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189268.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表