一种基于多目标智能识别的停车场管理方法及系统与流程
- 国知局
- 2024-07-31 21:21:52
本发明涉及计算机视觉,特别是一种基于多目标智能识别的停车场管理方法及系统。
背景技术:
1、当前的停车场管理主要采取传统的人工调度与监控模式。通常设置少量监控摄像头,由值班人员通过显示器观察情况。这种管理方式可以完成基本的场内监管,但效率低下。一方面,人工无法实时处理大量监控画面,容易疏漏;另一方面,监控视角有限,无法全面观察复杂环境,场景信息获取不精确。同时,缺乏对车辆行为的主动分析判断功能,安全隐患多。此外,传统管理过于依赖人工收费与记账,结算信息仅凭人工记忆,费用计算误差较大。
2、近年来,计算机视觉、三维重建、目标跟踪和模式识别等技术的发展为构建智能化停车场管理系统提供了希望。然而,如何进行多源数据的深度融合、实现全天候的智能跟踪监控、优化资源配置并实现车辆主动调度,以及实现车辆异常行为的识别等问题仍然需要解决。
技术实现思路
1、鉴于现有的停车场管理主要依靠简单的监控手段,存在环境感知不精确、车辆监管无效、资源配置非优化以及管理智能化程度低等问题,提出了本发明。
2、因此,本发明所要解决的问题在于如何实现车辆精确智能监控、车位资源动态优化配置以及车辆异常行为主动检测与响应,达到更高水平的智能化和精细化管理。
3、为解决上述技术问题,本发明提供如下技术方案:
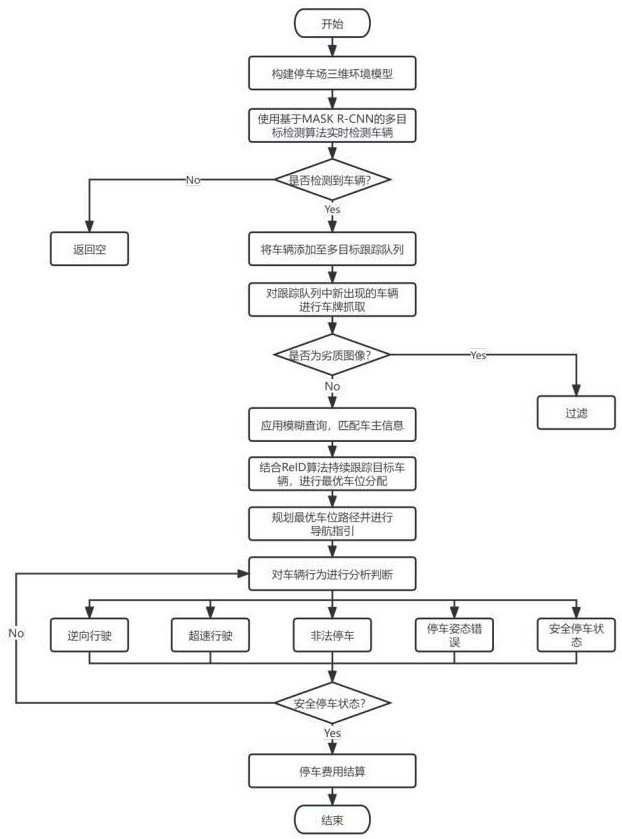
4、第一方面,本发明实施例提供了一种基于多目标智能识别的停车场管理方法,其包括使用无人机航拍获取停车场图像,并结合图像识别算法构建停车场三维环境模型;使用基于的多目标检测算法实时检测车辆,并根据检测的车辆信息匹配车主信息;结合算法持续跟踪目标车辆,并计算最短路径对应的空余车位,进行最优车位分配;利用三维环境模型规划最优车位路径并进行导航指引,同时对车辆行为进行分析判断;当系统检测到车辆已安全停入指定车位后,根据停放时间和区域自动生成费用明细并进行结算。
5、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:构建停车场三维环境模型包括,使用三维重建算法,计算特征点在相邻图像之间的映射关系以恢复相机拍摄位置,并生成稀疏点云;运用多视角算法生成高密度的三维点云,并利用地面控制点和传感器数据对不规则三维点云进行几何校正,使其符合实际停车场尺寸;使用语义分割网络提取点云中的停车位区域,并校正边界以生成标准化的停车位三维边界;结合校正后的三维点云和提取的标准停车位,构建精确的停车场三维环境数字模型;三维重建算法包括以下公式:
6、;
7、其中,和分别表示参考点云和待配准点云的第i个点,和分别表示旋转矩阵和平移向量,表示权重系数,表示全部点对的配准误差,表示参考点云和待配准点云中相互匹配的点对的数量。
8、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:构建停车场三维环境模型还包括,若特征点匹配数量较少、映射关系不可靠或稀疏点云的质量不符合预期,则重新计算特征点匹配或调整三维重建算法的参数;若多视角算法生成的点云密度不足或质量不佳,则调整算法参数或增加图像视角以提高点云质量;若地面控制点匹配误差较大,则重新处理地面控制点数据或调整校正算法的参数;若传感器数据不准确或噪音较大,则重新校准传感器或对数据进行滤波处理;若语义分割网络提取的停车位区域误差较大,则重新进行语义分割或优化网络模型以提高准确度;若校正后的停车位边界与实际停车位不符,则重新校正或调整校正算法的参数。
9、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:进行最优车位分配包括以下步骤:对多目标跟踪队列中的车辆,采用模型提取每个车辆的唯一视觉特征签名;当同一车辆在连续多帧图像中被检测到,则初始化一个跟踪器,并记录此车辆的特征签名;在后续帧中,将新检测到的车辆与存在的跟踪器进行特征匹配,若特征签名匹配成功,则更新跟踪器的状态;当连续多帧未成功匹配特征时,保留跟踪器一定时间后删除,避免积累误匹配;采用卡尔曼滤波算法对跟踪框进行平滑处理,并输出连续稳定的车辆轨迹,且当车辆驶出场景时终止对应的跟踪器;根据三维环境模型计算当前场景中存在的空余车位信息,并为每个跟踪的车辆规划最短路径到邻近空余车位;考虑车主信息和车位属性,进行车位智能分配和动态调整。
10、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:将新检测到的车辆与存在的跟踪器进行特征匹配包括以下步骤:对于每一帧中新检测到的车辆目标,使用模型提取车辆的特征向量;将新检测到的车辆的特征向量与已有跟踪器的特征签名进行匹配;若对应特征签名的余弦相似度超过预设阈值,则认为是同一辆车,特征匹配成功;若特征匹配成功,则更新对应跟踪器的状态信息包括位置、速度和外观;若新检测到的车辆目标无法与任何现有跟踪器的特征签名匹配成功,则根据需要创建新的跟踪器,并初始化新跟踪器的状态信息;对于长时间没有匹配到特征的跟踪器,根据设定的最大跟踪帧数确定是否保留此跟踪器,或进行终止并释放相关资源。
11、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:为每个跟踪的车辆规划最短路径到邻近空余车位包括以下步骤:加载预构建的停车场三维环境模型,模型中包含各个车位的坐标范围信息;检索实时跟踪系统中各车辆的当前位置坐标,并将已占用的车位标记在环境模型中;计算环境模型中未被标记的区域作为空余车位,并根据车位间距要求调整并划分空余车位的具体边界;为每个跟踪的车辆,取车主当前位置坐标作为路径规划的起点;在环境模型的导航网络中,将空余车位的中心点作为规划的终点;使用a*算法计算起点到各终点的最短路径,并返回到达最近空位的最短路径作为规划路径;迭代执行步骤,动态更新空余车位和规划路径。
12、作为本发明所述基于多目标智能识别的停车场管理方法的一种优选方案,其中:对车辆行为进行分析判断包括,若检测到车辆前进方向与期望行驶方向相反,则判定为逆向行驶,此时通过声音警报提醒驾驶员,避免隐患产生;若检测到车辆的速度变化超过停车场限定速度,则判定为超速行驶,此时通过警示信息或声音警报提醒驾驶员减速,同时借助摄像头监控并记录超速车辆信息;若检测到车辆在导航路径之外的区域停留,则判定为非法停车,此时向驾驶员发送警告信息,并通过摄像头对车辆进行监控,及时发现和处理违规停车行为;若检测到车辆在车位内的朝向与位置为规定不符,则判定为停车姿态错误,此时向驾驶员或管理人员发送警告信息,以调整车辆姿态;若车辆安全停入指定车位,则判定为安全停车状态;重复检测,直到进入安全停车状态。
13、第二方面,本发明实施例提供了一种基于多目标智能识别的停车场管理系统,其包括模型构建模块,用于使用无人机航拍获取停车场图像,并结合图像识别算法构建停车场三维环境模型;检测模块,用于使用基于的多目标检测算法实时监测车辆,并结合算法持续跟踪目标车辆;车位分配模块,用于根据检测的车辆信息匹配车主信息,并计算最短路径对应的空余车位,进行最优车位分配;判断模块,用于利用三维环境模型规划最优车位路径并进行导航指引,同时对车辆行为进行分析判断;结算模块,用于在系统检测到车辆已安全停入指定车位后,根据停放时间和区域自动生成费用明细并进行结算。
14、第三方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述计算机程序指令被处理器执行时实现如本发明第一方面所述的基于多目标智能识别的停车场管理方法的步骤。
15、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序指令被处理器执行时实现如本发明第一方面所述的基于多目标智能识别的停车场管理方法的步骤。
16、本发明有益效果为:综合运用了无人机低空俯瞰摄影测量、图像处理与计算机视觉算法、深度学习目标检测与跟踪、路径规划与调度算法以及车辆行为模式识别等技术手段,实现对每个车辆运动过程的实时监控分析,智能规划车辆的最佳路径并导航到空余车位,进行车辆异常行为的主动发现和预警,以及根据车辆准确的出入场信息进行结算管理。相较于传统人工管理或监控管理的方法,本发明更加智能化。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189437.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。