基于AVG调度算法的停车场设计评估系统与方法与流程
- 国知局
- 2024-07-31 21:21:41
本发明属于avg停车,更具体的,涉及一种基于avg调度算法的停车场设计评估系统与方法。
背景技术:
1、智慧停车系统,特别是结合了agv(自动引导车辆)和托盘技术的系统,已经开始在多个领域得到应用,例如商场、医院等。这种系统通过自动化的方式提升了停车的效率和便利性。
2、尽管智慧停车系统提供了许多优势,但它们也面临着一些关键挑战,特别是在提高存取车的效率方面。当前系统的一个主要问题是,每个托盘分散布置在停车场的各个车位,而从这些车位到泊车房(即智慧停车的接口)之间存在一定的距离。因此,在有存车需求时,agv需要从远处的车位移动托盘到泊车房,这在高峰时段或复杂狭窄的路径环境中尤其成问题,可能导致存车等待时间变长,从而影响顾客的整体体验。
3、随着agv+托盘技术的普及,为适应这种新型智慧停车系统,停车场的设计和结构需要进行相应的改造。关键在于如何有效评估和改进停车场的设计,以适应agv+托盘系统,从而最大化存取车的效率和顾客的便利感。
技术实现思路
1、为解决现有技术中存在的不足,本发明的目的在于解决上述缺陷,进而提出一种基于avg调度算法的停车场设计评估系统与方法。
2、本发明采用如下的技术方案。
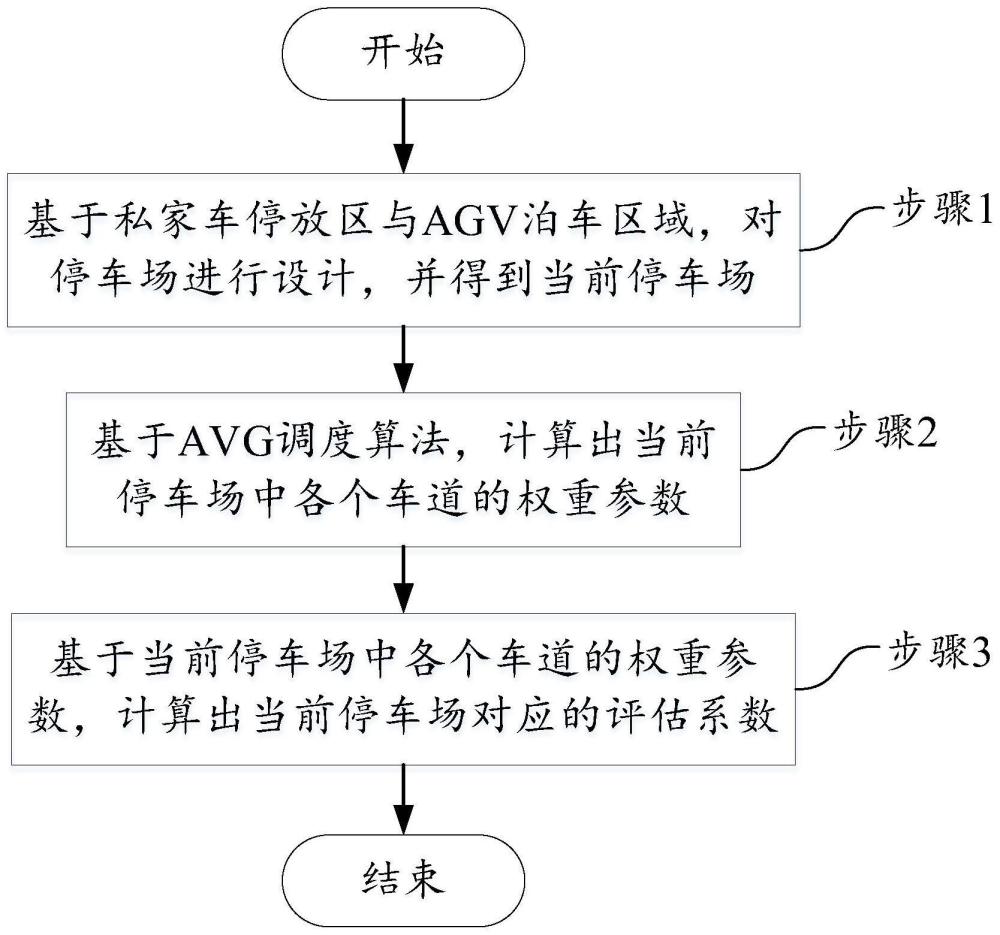
3、本发明第一方面公开了一种基于avg调度算法的停车场设计评估方法,其特征在于,包括步骤1~步骤3;
4、步骤1,基于私家车停放区与agv泊车区域,对停车场进行设计,并得到当前停车场;
5、步骤2,基于avg调度算法,计算出当前停车场中各个车道的权重参数;
6、步骤3,基于当前停车场中各个车道的权重参数,计算出当前停车场对应的评估系数。
7、进一步的,所述私家车停放区用于停放标准停车位,agv泊车区域用于停放立体机动停车位,所述agv小车用于将私家车停放区的车辆转移至agv泊车区域。
8、进一步的,私家车停放区靠近当前停车场的出入口以及电梯口,以减少私家车与agv小车的行驶路径交叉;agv泊车区域与私家车停放区充分接触。
9、进一步的,所述avg调度算法是粒子群优化算法、蚁群算法或模拟退火算法中的任意一种。
10、进一步的,所述avg调度算法是粒子群优化算法,步骤2具体包括步骤2.1~步骤2.3;
11、步骤2.1,建立当前停车场的算法模型,包括确定模型信息与算法参数;
12、步骤2.2,根据当前标准停车位的占用百分比,以及停放标准停车位的概率,确定avg调度算法中粒子的速度和位置;
13、步骤2.3,多次执行avg调度算法,基于每一次avg调度算法得到的行驶路径,汇总计算出当前停车场中各个车道的权重参数。
14、进一步的,模型信息包括:私家车停放区的停车位数量、agv泊车区域的停车位数量、各个车道的长度、节点的位置、avg小车的运行速率与数量、停车高峰期时私家车的平均运行速率与数量、当前标准停车位的占用百分比r、停放标准停车位而非立体机动停车位的概率pr。
15、进一步的,粒子的速度和位置如下式所示:
16、
17、v(k+1)i=w×v(k)i+c1pr×(qi-x(k)i)+c2r×(g-x(k)i),
18、x(k+1)i=x(k)i+v(k)i,
19、v′(k+1)i=w×v′(k)i+c1r×(qi-x′(k)i)+c2pr×(g-x′(k)i),
20、x′(k+1)i=x′(k)i+v′(k)i
21、其中,i表示粒子的编号,k为迭代次数,ε为权重系数,取值范围在(0,1)之间,c1和c2为学习因子,取值范围在[1.5,2]区间内,w为惯性权重,qi为粒子i的历史最优解,g为群体最优解,v(k)i与x(k)i分别为以私家车作为粒子i在第k次迭代中的速度和位置,v′(k)i与x′(k)i分别为以avg小车作为粒子i在第k次迭代中的速度和位置。
22、进一步的,各个车道的权重参数如下式所示:
23、
24、其中,lmn表示由节点m与节点n确定的车道的权重参数,s为所述多次执行avg调度算法的次数,τ(s)表示第s次执行avg调度算法得到的行驶路径覆盖lmn车道的次数。
25、进一步的,当前停车场对应的评估系数w如下式所示:
26、
27、其中,表示所有车道的权重参数的平均值,cov为协方差公式,m为节点的总个数,δ为权重系数,取值范围在[1.5,2]区间内。
28、本发明第二方面公开了一种基于avg调度算法的停车场设计评估系统,用于执行第一方面所述的方法,系统包括:设计模块、avg调度算法模块以及逻辑计算模块;
29、设计模块用于基于私家车停放区与agv泊车区域,对停车场进行设计,并得到当前停车场;
30、avg调度算法模块用于基于avg调度算法,计算出当前停车场中各个车道的权重参数;
31、逻辑计算模块用于基于当前停车场中各个车道的权重参数,计算出当前停车场对应的评估系数。
32、本发明的有益效果在于,与现有技术相比,本发明具有以下优点:
33、(1)本发明引入了一种创新的车辆管理策略,尤其针对停车场高峰期的挑战。在传统停车场中,高峰时段常常导致车位紧张,车辆寻位时间长,加剧了停车场的拥堵情况。针对这一问题,本发明通过引入自动引导车辆技术,实现了停车场的动态管理与优化。具体来说,在高峰期,agv小车自动将占用标准停车位的车辆移至立体停车设施,这不仅提高了停车场的容纳量,也大大减少了私家车在停车场内的行驶时间,从而提升了整体的停车效率和用户体验。此外,本发明还对agv操作进行了细致的规则设定,并对该设定进行了系统评估,确保了其实际应用的可行性和效率。
34、(2)在本发明中,通过监控标准停车位的占用百分比,实时调整agv调度算法的搜索策略,旨在平衡算法的全局搜索与局部搜索能力。在标准停车位占用率较高时,agv调度更倾向于全局搜索,以快速响应停车需求变化,优化停车资源的分配。反之,在标准停车位占用率低时,agv调度则加强局部搜索,提高停车的效率,减少不必要的车辆移动。这种动态调整机制使得agv调度算法能够在不同的停车场使用环境中维持最优性能,避免了因固定参数设置而陷入局部最优解,增强了系统的适应性和效率。
35、(3)考虑到私家车和agv小车在停车场内的相互竞争关系,本发明通过精心设计的调度策略,确保两者间的有效协调。通过多次执行avg调度算法,本发明不仅优化了agv的路径规划和任务分配,还计算出了各个车道的权重参数,这些参数反映了不同车道在不同时间段内的使用效率和优先级。利用这些权重参数,可以进一步优化停车场的整体设计和管理策略,如调整车道布局、设置优先车位等,以适应不同的停车需求和缓解高峰期的压力。此外,这种基于数据和算法的方法提高了停车场系统的鲁棒性,使其能够适应不断变化的停车需求和环境条件,从而保障了停车场运营的长期稳定性和高效性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/189427.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表