一种圆弧截获过渡路径计算方法与流程
- 国知局
- 2024-07-31 21:28:28
本发明属于飞行管理系统的,具体涉及一种圆弧截获过渡路径计算方法。
背景技术:
1、rf、af航段是民航飞行程序中非常重要航段类型,但进入rf、af航段的过渡路径是载机飞行管理系统中不可或缺的一部分,其可以大大增加飞机切入圆弧航段的平滑性,切防止系统产生超调,增加系统飞行品质。
2、目前国内有人机中主要以直线航段为主,国内机载产品不具备rf、af等圆弧航段的飞行能力,进入圆弧航段的过渡路径更是无从谈起。
技术实现思路
1、本发明的目的是:提供一种圆弧截获过渡路径计算方法,增加飞机切入圆弧航段的平滑性,切防止系统产生超调,增加系统飞行品质。
2、本发明的技术方案:为了实现上述发明目的,提出一种圆弧截获过渡路径计算方法,包括如下步骤:
3、步骤1:根据飞行计划数据,分别获取前航段的入航角、后圆弧航段的起始点坐标、转弯方向、转弯圆心坐标;
4、步骤2:根据所述后圆弧航段的转弯方向,确定所述前航段向所述后航段的过渡转弯方向;
5、步骤3:计算从所述前航段向所述后航段过渡所产生的过渡圆弧对应的转弯半径;
6、步骤4:过所述过渡圆弧圆心,沿所述前航段的入航角做平行辅助线,并从所述后圆弧航段的起始点向该平行辅助线做垂线,交点为垂足1;从所述后圆弧航段的转弯圆心向该平行辅助线做垂线,交点为垂足2,并计算垂足1与后圆弧航段的起始点坐标的距离;
7、步骤5:采用大圆航线的计算公式计算垂足1坐标;
8、步骤6:计算垂足2与所述后圆弧航段的转弯圆心的距离;
9、步骤7:计算前述平行辅助线与过渡圆弧和后圆弧航段转弯圆心连线的夹角;
10、步骤8:计算过渡圆弧转弯圆心坐标;
11、步骤9:计算过渡圆弧切点坐标。
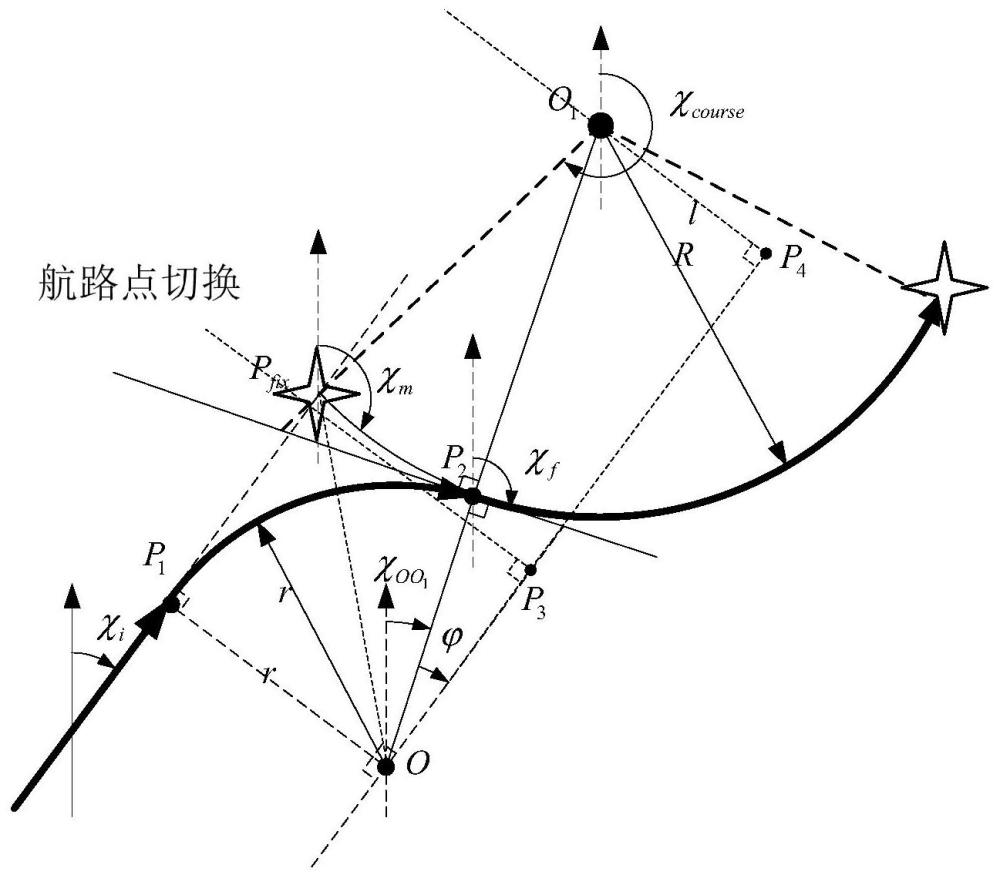
12、在一个可能的实施例中,在所述步骤1中,记所述前航段的入航角为χi,记所述后圆弧航段的起始点坐标为pfix,记所述后圆弧航段的转弯方向为dir,记所述后圆弧航段转弯圆心坐标为o1,记所述后圆弧航段的转弯半径为r:
13、在一个可能的实施例中,在所述步骤2中,确定所述前航段向所述后航段的过渡转弯方向过程具体包括:
14、①当所述后圆弧航段的转弯方向为dir为右转,过渡转弯方向为左转;
15、②当所述后圆弧航段的转弯方向为dir为左转,过渡转弯方向为右转。
16、在一个可能的实施例中,在所述步骤3中,计算飞机转弯半径的过程具体包括:
17、设r为飞机转弯半径,飞机当前地速为v,重力加速度为g,飞机最大滚转角为φ;根据以下公式计算飞机转弯半径r:
18、r=v2/g·tan(φ)。
19、在一个可能的实施例中,在所述步骤4中,计算垂足1与后圆弧航段的起始点坐标的距离的过程具体包括:
20、设o为前航段向所述后圆弧航段的过渡圆弧的转弯圆心,过o点,方位角为χi的射线,从固定点pfix向该射线引垂线,交点为p3,过圆弧航段圆心o1向该射线引垂线,交点为p4。显然|p3pfix|=r。
21、在一个可能的实施例中,在所述步骤5中,所述p3点坐标计算过程具体包括:
22、
23、
24、其中:
25、
26、re为地球半径。
27、在一个可能的实施例中,在所述步骤6中,所述|o1p4|计算过程具体包括;
28、设p3指向o1的方位角为则:
29、
30、因此,|o1p3|为:
31、
32、因此,由几何关系得:
33、
34、在一个可能的实施例中,在所述步骤7中,计算前述平行辅助线与过渡圆弧和后圆弧航段转弯圆心连线的夹角
35、设直线op3和两圆弧圆心连线oo1的夹角则:
36、
37、在一个可能的实施例中,在所述步骤7中,计算过渡圆弧转弯圆心o的坐标:
38、设圆心o到圆心o1的航向角
39、
40、圆心o的坐标:
41、
42、
43、在一个可能的实施例中,在所述步骤9中,求过渡圆弧切点p1点坐标:
44、
45、
46、根据本发明的第二方面,提出一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现上述方法的步骤。
47、根据本发明的第三方面,提出一种圆弧截获过渡路径计算设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述的处理器执行所述的计算机程序时实现上述方法的步骤。
48、本发明的优点和效果可以是:
49、(1)大大增加飞机切入圆弧航段的平滑性
50、(2)增加rf航段飞行的航迹可确定性和可重复性;
51、(3)防止系统产生超调,增加系统飞行品质。
技术特征:1.一种圆弧截获过渡路径计算方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤1中,记所述前航段的入航角为χi,记所述后圆弧航段的起始点坐标为pfix,记所述后圆弧航段的转弯方向为dir,记所述后圆弧航段转弯圆心坐标为o1,记所述后圆弧航段的转弯半径为r;
3.根据权利要求2所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤3中,计算飞机转弯半径的过程具体包括:
4.根据权利要求3所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤4中,计算垂足1与后圆弧航段的起始点坐标的距离的过程具体包括:
5.根据权利要求4所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤5中,所述p3点坐标计算过程具体包括:
6.根据权利要求5所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤6中,所述|o1p4|计算过程具体包括;
7.根据权利要求6所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤7中,计算前述平行辅助线与过渡圆弧和后圆弧航段转弯圆心连线的夹角:
8.根据权利要求7所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤7中,计算过渡圆弧转弯圆心o的坐标:
9.根据权利要求8所述的一种圆弧截获过渡路径计算方法,其特征在于:在所述步骤8中,求过渡圆弧切点p1点坐标:
10.一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时实现如权利要求1-9任意一项所述方法的步骤。
技术总结本发明属于飞行管理系统的技术领域,具体涉及一种圆弧截获过渡路径计算方法。该方法通过提取飞行计划信息,根据前一航路点入航角,后一RF航段(圆弧航段)的起始航路点、转弯方向、转弯圆心信息计算转弯方向,根据飞机当前地速以及最大横滚角计算转弯半径,通过几何关系进一步计算过渡圆心、过渡圆弧切点,从而确定过渡圆弧航迹。该方法提供了向RF/AF航段过渡的平滑飞行算法,增加了航迹的可确定性和可重复性,同时提高了载机进入圆弧航线时的飞行品质。技术研发人员:曹植,祁鸣东,张恒,裴毅飞,黄天宇,马少先受保护的技术使用者:中国航空工业集团公司西安飞行自动控制研究所技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240731/189670.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表