基于激光雷达和粒子群优化的自助零售机器人控制系统的制作方法
- 国知局
- 2024-07-31 21:41:41
本发明涉及机器人、激光雷达、深度学习领域,尤其涉及一种基于激光雷达和粒子群优化的自助零售机器人控制系统
背景技术:
1、在当今数字化,智能化的时代,自助零售设备在各行业的应用已经成为了常态现象,又因为自助售货机的便捷性,安全性,隐私性等优势深受广大年轻人的喜爱。但以往自助售货机的投放在人员密集处,主要是车站、机场、医院等公共场所的通道附近或者是人员出入口、主要吸引过路行人、满足过路行人的购物需求。设备体积庞大,挤占行人通道,设备体积小,货物储藏低,需要频繁补货。此外,现有的自助机器人方法无法做出自主的决策,交互性很低,自主性有限。
2、经检索,申请号为cn111383386a的中国发明专利,公开了一种无人零售机器人,通过在货柜上设置控制系统及信号传输模块实现自动售卖货物,采用双目摄像头实现立体识别,旨在提高扫描速度及准确率,并且降低劳动力与成本。但是上述专利存在问题有:第一:用户取用所需商品步骤复杂。繁琐的步骤,柜门的设计不够便捷,会影响用户的购物体验。第二:使用了多传感器进行环境感知,但机器人可能在复杂、拥挤或变化快速的环境中遇到挑战。无法适应不同场景和用户行为,因此如何提供一种无人零售机器人,综合考虑硬件设计、用户体验、隐私包含、系统可靠性和避开行人,有效成为了一个重要的技术问题,这是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的一个目的在于提出一种基于slam激光雷达和粒子群算法的自助零售机器人,本发明引入了cartographer)算法,使用“submap”的数据结构来表示环境,通过不断更新和合并这些submap来构建全局地图,用于机器人识别最短路径,避开障碍物;将基于slam激光雷达和粒子群算法集合,避免了单一方式机器人碰撞行人的问题。
2、基于激光雷达和粒子群优化的自助零售系统,包括
3、路径规划模块,基于回环检测的slam算法,使用“submap”的数据结构来表示环境,通过不断更新和合并这些submap来构建全局地图,用于机器人识别最短路径,避开障碍物;
4、根据运动过程连续时刻下的观测信息来进行图的构建,通过观测数据和历史数据进行匹配,判断机器人是否已经到过该地点,前端负责扫描采样,子图构造,扫描匹配,后端负责闭环检测,降低前端匹配过程子图累计误差;
5、行人轨迹预测模块,使用粒子群算法,粒子用于模拟行人运动过程,建立行人碰撞模型,从而通过粒子分布给出行人预测轨迹;
6、利用粒子群中粒子分布代表行人位置分布,使用行人运动方程预测行人位置先验分布,根据预测位置估计行人穿行意图,权重函数计算各个粒子权重,然后随机重采样给出行人位置后验分布;
7、商品检测模块,通过hog计算机视觉算法,准确地识别商品,并记录商品信息,包括名称、价格和位置,以保持库存的及时更新;
8、数据集成控制模块,用于存储商品信息、库存状态以及用户的交易记录,基于库存数据的分析结果,采用动态规划dp思想自动补货。
9、作为本发明进一步改进,所述路径规划模块规划具体步骤如下,包括以下步骤:
10、s11、机器人传感器数据采集2d点云数据,底盘odom数据,imu数据;
11、s12、2d扫描点云数据,采用体素滤波器对原始数据进行体素滤波,接着使用扫描匹配技术,将处理后的激光雷达数据与先前扫描进行匹配,以估计机器人的当前位置和姿态;
12、s13、底盘odom数据处理,底盘odom数据包含机器人在x、y方向上的位置以及姿态角度θ,利用底盘odom数据进行姿态外推,预测机器人未来的位置和姿态;
13、s14、imu数据:惯性测量单元包含线加速度和角速度的信息,使用滤波校准对imu数据处理,处理后imu数据进行姿势外推,预测机器人未来位置和信息;
14、s15、利用姿势外推器使用当前的odom数据和上一次保存的旧odom数据计算机器人在(x,y,θ)上的增量,通过计算位置和方向的差异来得到,对imu数据进行预积分,计算出速度、位移以及角度变化的估计值;
15、使用上一次前端匹配完成的last_pose和上一次保存的old_pose计算机器人在(x,y,θ)上的增量,比较两个姿态的差异来得到,估算下一次前端匹配的初始pose:
16、s16、扫描匹配根据姿态外推器提供的初始姿态,计算出扫描匹配的最优位姿,最小二乘化公式:
17、
18、ex是目标函数,表示误差综合,x是机器人位姿参数,n是观测值数量,hi(x)是模型对第i个观测值的预测函数,zi是第i个观测值的实际测量值;
19、s17、使用卡尔曼滤波器对扫描匹配结果进行运动滤波,平滑和过滤噪声;
20、s18、将经过滤波后的位姿插入子图中,更新局部地图;
21、s19、局部地图通常由一系列子地图组成,每个子地图都是通过一段时间内的连续扫描数据构建的,将经过滤波后的位姿插入到相应的子地图中,同时更新地图的表示,以反映机器人在环境中的最新位置;
22、s110、每个子地图被构造为一个概率栅格地图,其中栅格的概率值表示对应位置的状态;
23、概率地图公式:
24、
25、mnew(x)=clamp(odds-1(odds(mold(x))*odds(phit))) (3)
26、将概率p转换成一个比值,用于表示栅格点命中发生的几率,mold(x)是先前位置x处的地图概率,phit是当前位置x处的击中概率,clamp是截断函数,确保结果在合适范围内;
27、s111、回环检测,所有创建完成的submap以及当前的laser scan都会用作回环检测的matching,如果当前的scan和所有已创建完成的submap在距离上足够近,使用分支定界策略就会找到该闭环。获得新的scan时,在其附近一定范围寻找最优匹配帧;
28、s112、将插入子图的扫描帧与之前已创建完成的所有submap中的扫描帧用于回环检测,使用分支定界优化算法进行回环检测,以减少计算负担,计算回环约束并将其应用于位姿优化,以进一步提高全局定位的精度;
29、s113、根据上述算法,使用机器人实际运动信息,对slam系统中的地图进行实时更新,对当前位置进行修正。
30、作为本发明进一步改进,所述行人轨迹预测模块具体步骤如下,包括以下步骤:
31、s21、粒子群是一组离散的点,每个粒子代表了在行人可能出现的位置,这些粒子的分布反映了对行人位置的不确定性,粒子群进行随机初始化。
32、s22、建立行人运动模型,行人运动简化为刚体运动,可有四个变量,行人在全局坐标系中的x,y横轴坐标,纵轴坐标,vx,vy在全局坐标系的横轴速度、纵轴速度,量纲为m/s,行人运动方向变化为sinθ、cosθ;
33、运动方程为:
34、
35、s23、利用行人的运动模型,使用运动方程对每个粒子进行预测,以估计下一个时刻的行人位置,考虑行人的运动行为,如匀速运动或加速度;
36、s24、根据预测位置估计行人穿行意图,建立环境信息和穿行意图为自变量的权重函数w(pi|mi,di),mi代表行人第i个粒子的概率地图,行人位置x,y转换为概率地图坐标di,mi代表行人穿行意图(0,1,2)0代表停止运动,1代表匀速运动,2代表加速运动;
37、权重函数为:
38、
39、将实时检测到的行人位置和粒子群算法预测轨迹进行数据融合,更新行人状态估计,避让行人继续执行任务。
40、作为本发明进一步改进,所述商品识别模块具体步骤如下,包括以下步骤:
41、s31、选取商品样品,拍摄样品多角度图片;
42、s32、对多角度图片进行预处理;
43、s32、使用hog算法提取特征,hog通过计算图像局部区域梯度直方图提取纹理特征;
44、s34、将hog特征作为输入、配合标注的商品类别、训练商品分类器
45、s35、根据提取的商品信息更新库存记录。
46、作为本发明进一步改进,所述数据集成控制模块,包括如下方法步骤:
47、s41、设计mysql数据库模型,包括商品信息表、库存状态表、用户交易记录表;
48、s42、将商品信息、库存状态以及用户交易记录数据存储到相应的数据表中;
49、s43、零售机器人n件商品,每件商品固定id号,id=i商品重量为wi,产生经济效益为vi,假设一个n维向量xi=(x1,x2,…,xn),最大效益值为max∑vixi。xi=1代表商品存在,xi=0代表商品售出;
50、s44、商品效益最大方程为:
51、x[i][j]=max(x[i-1][j],x[i-1][j-w[i]]+v[i]) (6)
52、s45、迭代计算商品最大效益,在零售机器人最大重量w,容纳最大价值。
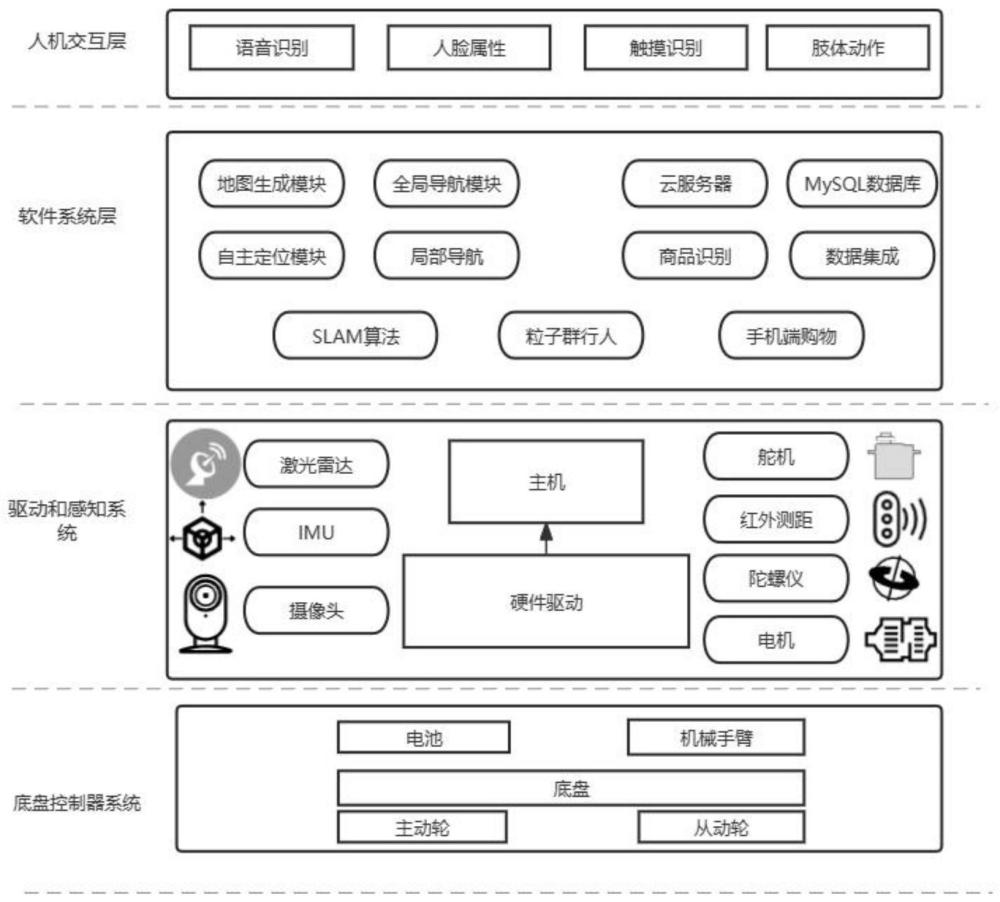
53、本发明公开了一种基于slam激光雷达和粒子群优化算法的自助智慧零售机器人系统,包括路径规划模块,基于回环检测的slam(cartographer)算法,使用“submap”的数据结构来表示环境,通过不断更新和合并这些submap来构建全局地图,用于机器人识别最短路径,避开障碍物;行人轨迹预测模块,使用粒子群算法,粒子用于模拟行人运动过程,建立行人碰撞模型,从而通过粒子分布给出行人预测轨迹;商品检测模块,通过hog计算机视觉算法,准确地识别商品,并记录商品信息,包括名称、价格和位置,以保持库存的及时更新;数据集成控制模块,云端mysql数据库存储数据,负责存储商品信息、库存状态以及用户的交易记录。基于库存数据的分析结果,集成控制模块采用动态规划(dp)思想自动补货,确定需要补货的商品和数量。
本文地址:https://www.jishuxx.com/zhuanli/20240731/190632.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表