一种基于物联网的智能门禁管控系统的制作方法
- 国知局
- 2024-07-31 22:23:37
本发明涉及智能门禁管控,具体为一种基于物联网的智能门禁管控系统。
背景技术:
1、目前,公司的目前门禁系统是通过派车业务激活后自动进入到排队系统,叫号后司机通过手机微信客户端接收到进厂通知信息,车辆通过门禁时通过业务有效性、叫号入厂时限以及环保排放标准都满足情况下自动进行抬杆进厂。
2、但是目前存在以下情况,一是在有些情况下,需要人工遥控器操作抬杆,会造成监管不力,这样就存在一些人为的漏洞;
3、二是在特定的约束场景,如充足均匀的光照、简单的背景、固定的拍摄角度等情况下,现有的车牌识别系统能取得较高的车牌识别准确率,但在光照不均、大角度偏转、雨雪天气等非约束场景下该系统存在较大的局限性,会导致车辆管理系统对车辆的识别速度较慢,且车辆存在识别不到的情况,影响车辆通行的效率;
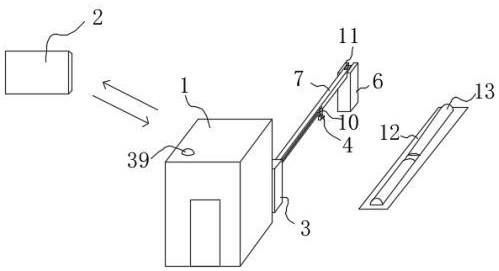
4、厂区内的入厂车辆存在较大的差异性,有小汽车、大客车和各种货车,进厂通道往往较宽,摄像头4所面对的非约束场景会增多,如图1和图2所示,现有的车牌识别系统中的摄像头4处于门禁通道的一侧,摄像头4朝向门禁通道的中间位置,当车辆8的行走轨迹5存在较大偏转时,摄像头4与车辆8的车牌位置会存在较大的偏角,容易导致识别失败的情况,影响车辆通行的效率。
5、因此,针对上述问题提出一种基于物联网的智能门禁管控系统。
技术实现思路
1、本发明的目的在于提供一种基于物联网的智能门禁管控系统,以解决上述背景技术中提出的“在有些情况下,需要人工遥控器操作抬杆,会造成监管不力,这样就存在一些人为的漏洞以及在光照不均、大角度偏转、雨雪天气等非约束场景下该系统存在较大的局限性,会导致车辆管理系统对车辆的识别速度较慢,且车辆存在识别不到的情况,影响车辆通行效率”的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于物联网的智能门禁管控系统,包括后台服务器、顶部带有报警器的保安亭、道闸升降器、摄像头和支撑座,道闸升降器的输出端转动连接有横杆,道闸升降器与后台服务器之间通过无线网络实现数据传输,该管控系统还包括设置在进入路径中间位置上的车辆偏移检测机构;
3、横杆上开设有滑槽,滑槽的内侧滑动连接有滑杆,所述滑杆的前端固定连接有转盘,所述转盘的底端内侧转动连接有转轮,转轮的外侧呈齿环状,所述转轮的底端中心处与摄像头的顶端固定连接,所述摄像头能够根据车辆偏移检测机构提供的偏移数据进行位移和偏转以处于最优的识别位置,所述横杆上设置有用于检测横杆倾斜状态的倾斜传感器;
4、所述转盘的内侧转动连接有齿环,所述转盘的内侧固定连接有第一电机,所述第一电机的输出端固定连接有齿轮,所述齿轮与齿环相啮合,所述齿环的外侧与转轮的外侧相啮合,通过第一电机实现摄像头角度的偏转。
5、在上述设置下,本发明中的厂区车辆门禁的工作方式为,司机通过手机微信客户端接收到进厂通知信息后,开始进厂,摄像头对车辆信息进行识别,当车辆的信息与后台服务器内预存的信息一致时,且业务有效性、叫号入厂时限以及环保排放标准都满足情况下自动进行抬杆进厂;
6、为了防止在非约束场景下,车辆大角度偏转后入厂造成摄像头与车辆车牌存在较大角度,摄像头容易存在识别错误和识别不出的情况,本发明将摄像头安装在横杆上,初始状态下,摄像头处于横杆的居中位置以获得更佳的识别角度,摄像头可以进行移动和偏转,在车辆偏移检测机构的位置和偏转之后,设置的摄像头能够进行位置调节和偏转,从而使摄像头与车辆的车牌处于便于识别的角度,从而增加摄像头的识别效率,减少门禁处出现堵塞的现象;
7、本发明中,摄像头角度的偏转方式为:第一电机转动并带动齿轮转动,齿轮的转动会通过齿环使转轮出现偏转,转轮会同步带动摄像头出现偏转,从而实现摄像头识别角度与车辆车牌面的垂直或接近垂直,实现有效识别;
8、优选地,所述横杆的内侧固定连接有第二电机,所述第二电机的主轴末端固定连接有第一螺杆,所述第一螺杆转动设置在滑槽内,所述第一螺杆的外侧与滑杆的内侧螺旋连接,通过第二电机的转动实现摄像头位置的改变。
9、在上述设置下,摄像头位置的移动方式为,第二电机转动,第二电机转动带动第一螺杆转动,第一螺杆的转动会通过滑杆带动转盘和摄像头实现位置的改变,滑杆与转盘的转动连接便于摄像头垂直于地面;
10、优选地,车辆偏移检测机构包括第一基座,所述第一基座的上表面滑动连接有两个对称的滑板,所述滑板突出于道路表面,两个所述滑板向道路的两侧方向逐渐升高,所述第一基座的底端固定连接有第一伸缩杆,所述滑板的底端固定连接有压杆,所述第一伸缩杆的顶端活动端与滑板的底端固定连接。
11、本发明中的第一伸缩杆和第二伸缩杆为弹性支撑构件,内部存在复位弹簧,为现有技术,在此不做多余阐述;
12、优选地,所述第一基座的每一侧还固定连接有固定杆、第二伸缩杆、两个定滑轮以及滑筒,所述第二伸缩杆的顶端活动端转动连接有动滑轮,压杆下行时,能够将第二伸缩杆的顶端活动端压下。
13、优选地,所述滑筒的内侧滑动连接有活塞,所述滑筒的一端内侧固定连接有拉力传感器,所述滑筒的内侧设置有拉簧,所述拉簧的两端分别与拉力传感器的一端和活塞的一端固定连接,初始状态下,活塞处于滑筒的中间位置,此时,拉簧不受力。
14、优选地,所述固定杆的外侧固定连接有拉绳,所述拉绳依次绕在动滑轮和两个定滑轮之后与活塞的另一端固定连接,通过拉力传感器获得活塞的偏移距离。
15、优选地,其中一个定滑轮与固定杆平齐,所述动滑轮设置在固定杆和与固定杆平齐的定滑轮之间。
16、在上述设置下,本发明中设置有车辆偏移检测机构,车辆偏移检测机构能够对车辆的道路中的居中位置和偏转角度进行大致的识别,后续摄像头会根据车辆偏移检测机构得到的数据进行位移和偏转,从而实现更加准确高效的识别;
17、车辆偏移检测机构的检测方式为:车辆在进厂时,如果车辆的前车轮同时或接近同时经过两个滑板时,则系统认定车辆没有发生偏转,此时,可以根据车辆偏移检测机构识别车辆是否处于居中位置,当车辆没有处于路径上的居中位置时,可以使摄像头向偏离一侧移动,使摄像头的识别角度更加接近车辆的车牌处,实现高效有效的识别;
18、车辆偏移检测机构识别车辆是否处于居中位置的方式为:当车辆在路径上没有处于居中位置时,两个前车轮经过两个滑板时,两个前车轮与两个滑板的接触位置会不同,因为滑板的上侧呈倾斜状且突出与路面,此时,两个滑板的下陷程度会不同,通过分析两个滑板的下陷程度能够获得车辆在道路上的偏移位置,其中,滑板的下陷会通过压杆作用到动滑轮上,动滑轮的下降会通过拉绳拉动活塞向远离拉力传感器的一侧运动,拉力传感器受力,拉力传感器的受力值能够直接体现滑板的下陷深度,从而反应该侧车轮在滑板上的位置,在获得两个车轮分别在两个滑板上的位置后,则能够获得车辆在道路上的偏移值,从而将摄像头根据偏移位置进行移动,使摄像头直面车辆的车牌处,实现更加高效的识别;
19、本发明将动滑轮设置在固定杆和与固定杆平齐的定滑轮之间的作用为,因为滑板左右的高度差异较小,本发明在动滑轮下降时,能够对动滑轮两侧的拉绳均产生拉扯,在这种设置下,动滑轮的下降距离转变为拉绳的拉伸距离会被增加,从而增加活塞运动的敏感性,增加拉力传感器受力识别的敏感性;
20、车辆偏移检测机构识别车辆是否处于偏转的方式为:当车辆入厂存在偏转时,两个前车轮分别经过两个滑板时会存在一个时间差,即两个拉力传感器的数值变化会存在差异,当车辆首先经过一侧滑板时,车辆会向另一侧滑板的方向倾斜,由此,可以判断车辆入厂时的偏转角度,从而将摄像头根据偏转方向进行转动,使摄像头相对直面车辆的车牌处,实现更加高效的识别;
21、当车辆偏转入厂,且车辆在路径上没有处于居中位置时,本发明中滑板也能够进行参考上述两种方式进行识别,并使摄像头同时进行位置的改变和角度的偏移;
22、优选地,该管控系统还包括第二基座,所述第二基座的顶端通过铰链转动连接有倾斜板,倾斜板落下后,能够与地面保持平齐,所述第二基座的内侧固定连接有支撑板,所述支撑板的顶端通过铰链转动连接有电动推杆,所述电动推杆的顶端通过铰链与倾斜板的底端转动连接,通过电动推杆活动端的伸缩实现倾斜板开口一侧的升降运动。
23、优选地,所述倾斜板的底端固定连接有两个连接板,两个连接板之间转动连接有第二螺杆,两个连接板之间固定连接有限位杆,所述限位杆的外侧滑动连接有滑块,所述滑块的内侧与第二螺杆的外侧螺旋连接,其中一个所述连接板上固定连接有第三电机,所述第三电机的主轴末端与第二螺杆固定连接,所述滑块的一端固定连接有喷头,通过转动所述第三电机实现喷头位置的调节。
24、优选地,所述第二基座的底端固定连接有水泵,所述水泵的输入端与供水管相连通,所述水泵的输出端通过软管与喷头的进水端相连通。
25、在上述设置下,在调整好摄像头的位置和角度之后,如果摄像头仍无法实现有效识别,门禁系统会认定车辆的车牌位置被灰尘等覆盖,车牌位置一般处于车辆前底端的中间位置,此时,设置的摄像头可以通过车辆偏移检测机构中获得的车辆在进厂通道的位置,从而改变喷头的位置,喷头的水平移动方式通过第三电机带动第二螺杆实现,使喷头迎向车辆的车牌处,水泵工作,电动推杆的活动端不断地进行往复运动,使倾斜板往复上下开合,喷头会朝向车辆的车牌处进行喷水清理,以便于摄像头对车辆信息的识别。
26、当对车牌进行喷水清理后,摄像头仍无法识别车辆的信息或该车辆信息没有与后台服务器内预存的信息匹配时,摄像头会对车辆进行抓拍存储在后台服务器内并使报警器工作,以增加厂区的安全性;
27、当保安亭内的工作人员手动打开横杆时,本发明中的摄像头同样会对车辆进行抓拍存储在后台服务器内。
28、与现有技术相比,本发明的有益效果是:
29、1、该一种基于物联网的智能门禁管控系统,为了防止在非约束场景下,车辆大角度偏转后入厂造成摄像头与车辆车牌存在较大角度,摄像头容易存在识别错误和识别不出的情况,本发明将摄像头安装在横杆上,初始状态下,摄像头处于横杆的居中位置以获得更佳的识别角度,摄像头可以进行移动和偏转,在车辆偏移检测机构的位置和偏转之后,设置的摄像头能够进行位置调节和偏转,从而使摄像头与车辆的车牌处于便于识别的角度,从而增加摄像头的识别效率,减少门禁处出现堵塞的现象。
30、2、该一种基于物联网的智能门禁管控系统,本发明中设置有车辆偏移检测机构,车辆偏移检测机构能够对车辆的道路中的居中位置和偏转角度进行大致的识别,后续摄像头会根据车辆偏移检测机构得到的数据进行位移和偏转,从而实现更加准确高效的识别。
31、3、该一种基于物联网的智能门禁管控系统,车辆偏移检测机构的检测方式为:车辆在进厂时,如果车辆的前车轮同时或接近同时经过两个滑板时,则系统认定车辆没有发生偏转,此时,可以根据车辆偏移检测机构识别车辆是否处于居中位置,当车辆没有处于路径上的居中位置时,可以使摄像头向偏离一侧移动,使摄像头的识别角度更加接近车辆的车牌处,实现高效有效的识别。
32、4、该一种基于物联网的智能门禁管控系统,车辆偏移检测机构识别车辆是否处于居中位置的方式为:当车辆在路径上没有处于居中位置时,两个前车轮经过两个滑板时,两个前车轮与两个滑板的接触位置会不同,因为滑板的上侧呈倾斜状且突出与路面,此时,两个滑板的下陷程度会不同,通过分析两个滑板的下陷程度能够获得车辆在道路上的偏移位置,其中,滑板的下陷会通过压杆作用到动滑轮上,动滑轮的下降会通过拉绳拉动活塞向远离拉力传感器的一侧运动,拉力传感器受力,拉力传感器的受力值能够直接体现滑板的下陷深度,从而反应该侧车轮在滑板上的位置,在获得两个车轮分别在两个滑板上的位置后,则能够获得车辆在道路上的偏移值,从而将摄像头根据偏移位置进行移动,使摄像头直面车辆的车牌处,实现更加高效的识别。
33、5、该一种基于物联网的智能门禁管控系统,本发明将动滑轮设置在固定杆和与固定杆平齐的定滑轮之间的作用为,因为滑板左右的高度差异较小,本发明在动滑轮下降时,能够对动滑轮两侧的拉绳均产生拉扯,在这种设置下,动滑轮的下降距离转变为拉绳的拉伸距离会被增加,从而增加活塞运动的敏感性,增加拉力传感器受力识别的敏感性。
34、6、该一种基于物联网的智能门禁管控系统,车辆偏移检测机构识别车辆是否处于偏转的方式为:当车辆入厂存在偏转时,两个前车轮分别经过两个滑板时会存在一个时间差,即两个拉力传感器的数值变化会存在差异,当车辆首先经过一侧滑板时,车辆会向另一侧滑板的方向倾斜,由此,可以判断车辆入厂时的偏转角度,从而将摄像头根据偏转方向进行转动,使摄像头相对直面车辆的车牌处,实现更加高效的识别。
35、7、该一种基于物联网的智能门禁管控系统,当车辆偏转入厂,且车辆在路径上没有处于居中位置时,本发明中滑板也能够进行参考上述两种方式进行识别,并使摄像头同时进行位置的改变和角度的偏移。
36、8、该一种基于物联网的智能门禁管控系统,在调整好摄像头的位置和角度之后,如果摄像头仍无法实现有效识别,门禁系统会认定车辆的车牌位置被灰尘等覆盖,车牌位置一般处于车辆前底端的中间位置,此时,设置的摄像头可以通过车辆偏移检测机构中获得的车辆在进厂通道的位置,从而改变喷头的位置,喷头的水平移动方式通过第三电机带动第二螺杆实现,使喷头迎向车辆的车牌处,水泵工作,电动推杆的活动端不断地进行往复运动,使倾斜板往复上下开合,喷头会朝向车辆的车牌处进行喷水清理,以便于摄像头对车辆信息的识别。
37、9、该一种基于物联网的智能门禁管控系统,当对车牌进行喷水清理后,摄像头仍无法识别车辆的信息或该车辆信息没有与后台服务器内预存的信息匹配时,摄像头会对车辆进行抓拍存储在后台服务器内并使报警器工作,以增加厂区的安全性,当保安亭内的工作人员手动打开横杆时,本发明中的摄像头同样会对车辆进行抓拍存储在后台服务器内。
本文地址:https://www.jishuxx.com/zhuanli/20240731/193163.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。