一种前装ETC防蹭方法、系统及车辆与流程
- 国知局
- 2024-07-31 22:25:48
本发明涉及车辆智能交通的,特别涉及一种前装etc防蹭方法、系统及车辆。
背景技术:
1、不停车电子收费系统(electronic toll collection,etc)是一种专门用于收费道路的道路收费方式,它利用安装在车辆挡风玻璃上的车载电子标签与收费站etc车道上的微波天线之间的微波专用短程通讯,以及计算机联网技术与银行进行后台结算处理,从而达到车辆通过路桥收费站不需停车就能交纳路桥费的目的。随着智能交通系统的发展,etc已在中国的高速公路网络中广泛应用。
2、目前,新申请准入的车型普遍选装直接供电的前装单片式etc车载装置,这种前装etc由于采用了安全模块,其响应速度和灵敏度等性能相比传统的后装需插卡的etc要更加优秀,然而,这种技术升级也带来了一些新的挑战,其中最为显著的问题就是在高速路口的etc通道中,蹭etc的行为变得更加难以预测和防范,并且由于前装etc不需要插储值卡或记账卡,驾驶员在发现etc被蹭时往往无法在短时间内采取措施阻止。因此在驾驶员做出反应前,如果车辆本身可通过前挡处的前视摄像头的识别能力,判断旁边车道或前方车辆是否有蹭etc的动机,从而反馈给etc终止刷卡操作,则可避免etc被蹭的情况。
3、现有技术公开了一种etc防蹭方法,利用摄像头判定视野内是否属于高速出入口,随后通过识别前方车辆是否有越线趋势或占道抢行等蹭etc的动机,从而阻止etc刷卡操作,规避etc被蹭的情况发生,一方面,由于高速路口的放行速度不一,在车流量较大,抬杆速度较快的时候,由于前装etc识别快,高速路口已经抬杆,旁边车道车辆如果急加速,往往还是可以成功蹭到etc,阻止etc刷卡操作只能够保证不让自己的资金流失,并不能阻止这种行为,导致发生碰撞风险;另一方面,该方法仅利用单摄像头识别高速路口作为前提,而单摄像头盲区易产生误交易,且在停车场等场景下会出现识别不到位,被人蹭到etc的情况,即应用场景单一。
技术实现思路
1、为解决上述现有技术存在etc使用场景单一,etc被蹭风险和碰撞风险高的问题,本发明旨在提出一种前装etc防蹭方法、系统及车辆,能够扩展etc使用场景,有效阻止了etc被蹭的情况,减少etc被蹭风险和车辆碰撞风险。
2、为了达到上述技术效果,本发明的技术方案如下:
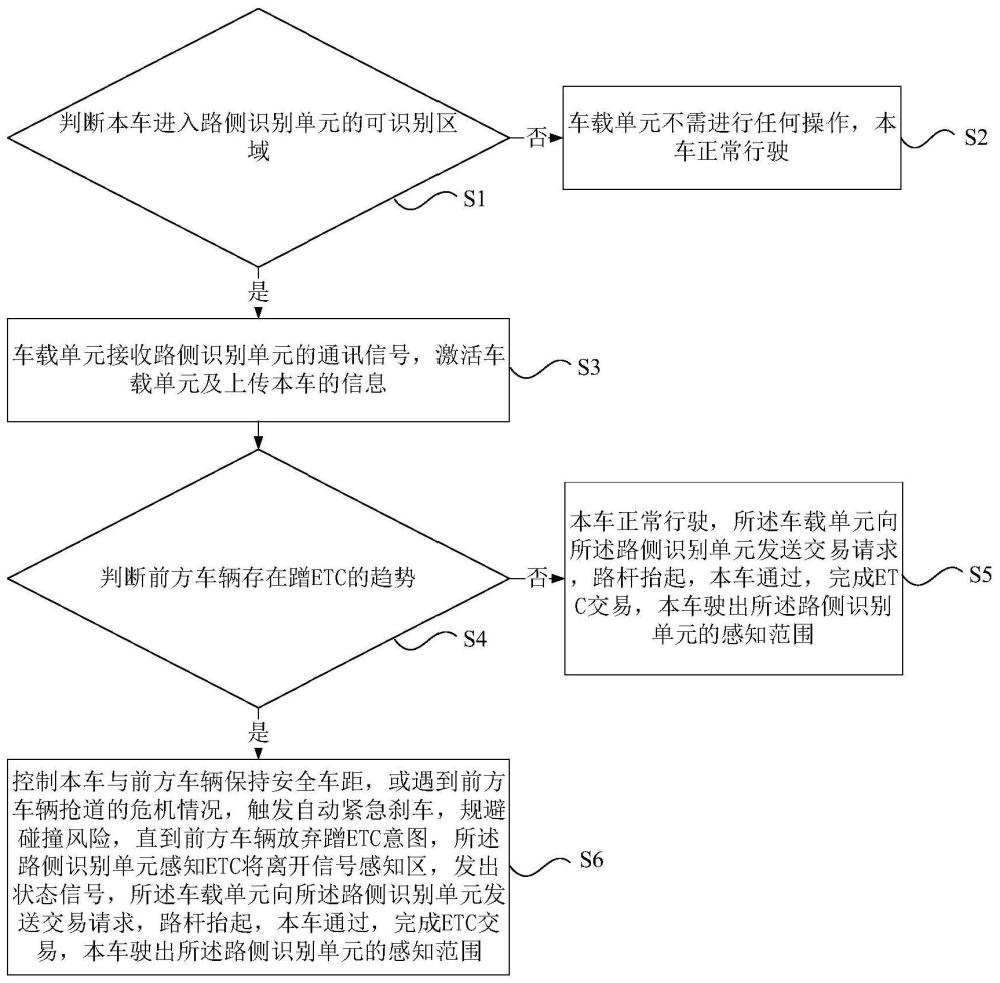
3、判断本车是否进入路侧识别单元的可识别区域,若否,则车载单元不需进行任何操作,本车正常行驶;若是,则车载单元接收路侧识别单元的通信讯号,激活车载单元及上传本车的信息;
4、待激活车载单元及上传本车的信息后,判断前方车辆是否存在蹭etc的趋势,若否,则本车正常行驶,所述车载单元向所述路侧识别单元发送交易请求,路杆抬起,本车通过,完成etc交易,本车驶出所述路侧识别单元的感知范围;若是,控制本车与前方车辆保持安全车距,或遇到前方车辆抢道的危急情况,触发自动紧急刹车,规避碰撞风险,直到前方车辆放弃蹭etc意图,所述路侧识别单元感知etc将离开信号感知区,发出状态信号,所述车载单元向所述路侧识别单元发送交易请求,路杆抬起,本车通过,完成etc交易,本车驶出所述路侧识别单元的感知范围。
5、进一步,利用防蹭判断单元判断前方车辆是否存在蹭etc的趋势,所述防蹭判断单元包括前视摄像头和前毫米波雷达。
6、进一步,所述判断前方车辆是否存在蹭etc的趋势包括以下情况:
7、当本车道及旁边车道前方均不存在车辆时,默认判定etc防蹭未触发,并将etc防蹭未触发信号反馈给车载单元,待路杆正常抬杆后,本车驶出所述路侧识别单元的感知范围,完成etc交易;
8、当本车道前方存在车辆时,利用所述前视摄像头反馈前方车道线和车辆位置,利用所述前毫米波雷达反馈前方车辆位置,速度以及当前跟车距离,此时若非高速路口场景,利用所述前视摄像头确定车辆位置,结合所述毫米波雷达确定前方车辆距离,并将车辆位置和前方车辆距离的信息反馈至车载单元;在车载单元反馈被激活的情况下,若前方车辆一直处于停止状态或反复挪动车辆,即判定前方车辆存在蹭etc的趋势,反馈etc防触触发信号,停止etc交易;待前方车辆挪走后,所述前视摄像头和前毫米波雷达判定前方通畅,向车载单元反馈etc防触未触发信号,车载单元向所述路侧识别单元反馈交易状态,路杆抬起,本车驶离路口后完成etc交易;
9、当本车道前方不存在车辆,旁边车道前方存在车辆,若处于高速路口场景,利用所述前视摄像头分辨车道线,并判定前方车辆是否有轮胎压线准备变道或车身是否已经越过车道线,结合所述前毫米波雷达对车距进行判定,选择是否刹停本车。
10、进一步,若前方车辆有轮胎压线准备变道或车身已经越过车道线情况,所述前视摄像头结合所述前毫米波雷达对前方车辆信息进行分析,判定前方车辆存在蹭etc的趋势,向车载单元反馈etc防触触发信号,终止etc交易,同时遇到危急情况刹停本车;若在此过程前方车辆放弃插道,则本车在短暂地等待后,所述车载单元向所述路侧识别单元发送交易请求,路杆抬起,本车通过,完成etc交易。
11、进一步,利用所述毫米波雷达控制本车与前方车辆保持安全车距,或遇到前方车辆抢道的危机情况,利用所述规避碰撞单元触发自动紧急刹车,规避碰撞风险。
12、进一步,所述规避碰撞单元包括车身控制单元、电子驻车制动单元和安全气囊控制器,所述车身控制单元分别与所述防蹭判断单元、所述车载单元、所述电子驻车制动单元和所述安全气囊控制器连接。
13、进一步,所述车身控制单元连接有组合仪表,所述组合仪表用于当前方车辆存在蹭etc的趋势时,进行报警和文字提示。
14、进一步,所述车身控制单元还连接有用于反馈自身工作状态和转向角度信号的电动助力转向控制器,当具有蹭etc的趋势的前方车辆执意插道或无法退出本车道时,利用所述电动助力转向控制器输出本车的转向角度信号,通过所述转向角度信号判断出本车放弃etc交易,待本车驶出所述识别区域后,停止当前车道的etc交易,直至本车进入另一车道的路侧识别单元的可识别区域,重新激活当前车道的etc交易。
15、本发明还提出了一种前装etc防蹭系统,包括:
16、防蹭判断单元,用于在本车进入路侧识别单元的可识别区域时,判断前方车辆是否存在蹭etc的趋势,当判定前方车辆存在蹭etc的趋势,控制本车与前方车辆保持安全车距;
17、车载单元,用于在本车进入路侧识别单元的可识别区域时,接收路侧识别单元的通信讯号,激活车载单元及上传本车的信息;当前方车辆存在蹭etc的趋势,向所述路侧识别单元发送交易请求,路杆抬起,本车通过,完成etc交易,本车驶出所述路侧识别单元的感知范围;当前方车辆不存在蹭etc的趋势,向所述路侧识别单元发送交易请求,路杆抬起,本车通过,完成etc交易,本车驶出所述路侧识别单元的感知范围;
18、规避碰撞单元,用于遇到前方车辆抢道的危急情况,触发自动紧急刹车,规避碰撞风险。
19、本发明还提出了一种车辆,包括如所述的前装etc防蹭系统。
20、与现有技术相比,本发明技术方案的有益效果是:
21、本发明提出了一种前装etc防蹭方法、系统及车辆,首先在本车进入路侧识别单元的可识别区域后,车载单元接收路侧识别单元的通信讯号,激活车载单元及上传本车的信息,其次判断前方车辆是否存在蹭etc的趋势,得到前方车辆蹭etc的趋势结果,避免了仅以单摄像头识别高速路口作为前提,在其他应用场景下出现识别不到位,被蹭etc的情况;然后车载单元根据前方车辆是否具有蹭etc的趋势的判定结果,决定是否向所述路侧识别单元发送交易请求,通过前方车辆蹭etc的趋势的判断,决定车载单元是否向所述路侧识别单元发送交易请求,扩展了etc使用场景,保证在难以通过拔卡操作阻止前装etc交易的时候,有效阻止了etc被蹭的情况,减少etc被蹭风险;进一步,当前方车辆存在蹭etc的趋势,通过控制本车与前方车辆保持安全车距,或遇到前方车辆抢道的危急情况,触发自动紧急刹车,有效降低了车辆碰撞风险,以保障驾驶员的安全。
本文地址:https://www.jishuxx.com/zhuanli/20240731/193353.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表