扫雷车及其控制方法与流程
- 国知局
- 2024-08-02 13:42:34
本发明涉及扫雷,特别涉及一种扫雷车及其控制方法。
背景技术:
1、链枷式扫雷装置是一种通过滚筒快速旋转带动链锤来引爆或破坏地雷的机械式扫雷机构,其扫雷率受地形、地面硬度、滚筒转速、作业速度等多种因素影响。在扫雷过程中,往往依靠操作手对作业过程的观察和判断,不断调整机器的参数和作业状态来提升扫雷率,因此难以保证较高的扫雷率。
2、相关技术主要通过对链枷式扫雷装置进行机械结构的优化来提高扫雷率,例如:对链锤形状进行优化以降低链锤在土壤中的阻力,以此提高滚筒的转速,增加链锤的打击能量;通过作业深度调整装置进行作业深度的调整以适应不同地形、地质条件,避免链锤装置作业深度过深导致机器功率无法满足作业需求;通过增加浮动功能、减重功能、偏摆机构来提高地形适应能力,避免漏扫地雷。
技术实现思路
1、经研究发现,相关技术中的链枷式扫雷装置在扫雷作业过程中虽然通过优化机械结构提高了对地形、地质条件的适应性,但地形起伏变化、地面硬度不均匀等因素仍然时常造成滚筒的转速出现忽高忽低的不稳定现象,导致链锤的打击能量忽大忽小,进而造成作业深度深浅不一,从而产生漏雷或打击能量不足等现象,影响扫雷率。因此仍然需要依赖于操作手对作业过程的观察和对扫雷装置及作业速度的及时调整。
2、有鉴于此,本公开实施例提供了一种扫雷车及其控制方法,能够改善扫雷率,并减少对操作手的依赖。
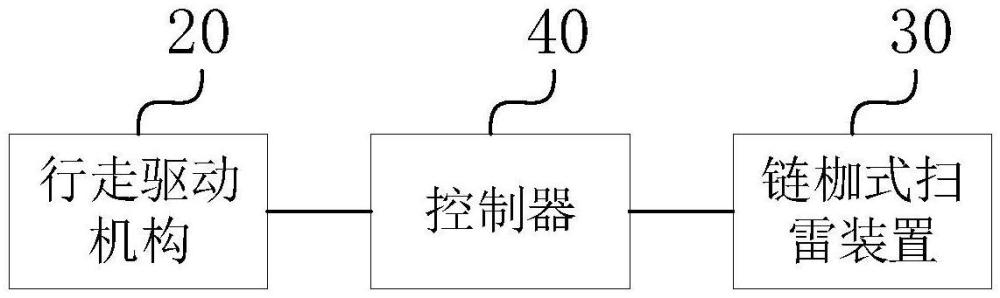
3、在本公开的一个方面,提供一种扫雷车,包括:车体,具有行走机构;行走驱动机构,设置于所述车体,被配置为驱动所述行走机构在扫雷场地行进;链枷式扫雷装置,设置于所述车体,且包括相对所述车体可转动的滚筒和与所述滚筒连接的扫雷链锤,所述链枷式扫雷装置被配置为通过驱动所述滚筒转动,以带动所述扫雷链锤对所述扫雷场地的地面进行锤击;和控制器,与所述行走驱动机构和所述链枷式扫雷装置信号连接,被配置为根据所述滚筒的实际转速,通过所述行走驱动机构调整所述车体的行进速度,以使所述扫雷链锤相邻两次击打地面的间距符合预设范围。
4、在一些实施例中,所述链枷式扫雷装置包括与所述滚筒连接的多个扫雷链锤,所述控制器被配置为根据所述滚筒的实际转速,通过所述行走驱动机构调整所述车体的行进速度,以使每个扫雷链锤相邻两次击打地面的间距均符合预设范围。
5、在一些实施例中,所述扫雷车还包括:遥控装置,与所述控制器信号连接,被配置为与所述控制器进行通信,以传递控制指令和所述扫雷车的运行状态信息。
6、在一些实施例中,所述控制器被配置为接收所述遥控装置传递的对所述扫雷链锤相邻两次击打地面的间距进行设置的设置指令,并根据所述设置指令对所述扫雷链锤相邻两次击打地面的间距进行设置。
7、在一些实施例中,所述遥控装置包括遥控器和第一通信电台,所述遥控器与所述第一通信电台信号连接,所述扫雷车还包括设置在所述车体内的第二通信电台,所述第二通信电台与所述第一通信电台通过无线进行自组网通信。
8、在一些实施例中,所述链枷式扫雷装置还包括第一转速传感器和与所述滚筒驱动连接的第一扭矩输出器,所述行走驱动机构包括第二转速传感器和与行走机构驱动连接的第二扭矩输出器;所述控制器被配置为根据所述第一转速传感器实时采集的所述滚筒的实际转速或所述第一扭矩输出器的输出转速,计算与所述滚筒的实际转速或所述第一扭矩输出器的输出转速相匹配的所述车体的理论行进速度,通过对所述第二转速传感器采集的所述第二扭矩输出器的输出转速的闭环控制,以使所述车体的实际行进速度与所述车体的理论行进速度一致。
9、在一些实施例中,所述第二扭矩输出器包括行走液压马达,所述行走驱动机构还包括行走液压泵,与所述行走液压马达通过液压油路连通,所述第一扭矩输出器包括扫雷作业液压马达,所述链枷式扫雷装置还包括扫雷作业液压泵,与所述扫雷作业液压马达通过液压油路连通,所述行走液压泵和所述扫雷作业液压泵共用动力源;其中,所述控制器与所述行走液压泵和所述扫雷作业液压泵信号连接,被配置为调整所述行走液压泵和所述扫雷作业液压泵中的至少一个的输出排量,以实现对所述动力源对所述行走液压泵和所述扫雷作业液压泵的输出功率的分配。
10、在一些实施例中,所述扫雷车还包括发动机、联轴器和分动箱,所述发动机通过所述联轴器与所述分动箱连接,所述分动箱分别与所述行走液压泵和所述扫雷作业液压泵连接。
11、在一些实施例中,所述扫雷车还包括设置在所述行走液压泵和所述扫雷作业液压泵中的至少一个对应的液压油路上的压力传感器,所述控制器与所述压力传感器信号连接,被配置为根据所述压力传感器感测的压力信号计算所述行走液压泵和所述扫雷作业液压泵中的至少一个的实际输出功率。
12、在一些实施例中,所述行走液压泵与所述扫雷作业液压泵分别对应的液压油路相互独立。
13、在本公开的一个方面,提供一种前述的扫雷车的控制方法,包括:通过所述行走驱动机构驱动所述行走机构在扫雷场地行进,并通过驱动所述滚筒转动,以带动所述扫雷链锤对所述扫雷场地的地面进行锤击;根据所述滚筒的实际转速,通过所述行走驱动机构调整所述车体的行进速度,以使所述扫雷链锤相邻两次击打地面的间距符合预设范围。
14、在一些实施例中,所述控制方法还包括:接收所述遥控器传递的对所述扫雷链锤相邻两次击打地面的间距进行设置的设置指令;根据所述设置指令对所述扫雷链锤相邻两次击打地面的间距进行设置。
15、在一些实施例中,所述链枷式扫雷装置还包括第一转速传感器和与所述滚筒驱动连接的第一扭矩输出器,所述行走驱动机构还包括第二转速传感器和与所述行走机构驱动连接的第二扭矩输出器;其中,根据所述滚筒的实际转速,通过所述行走驱动机构调整所述车体的行进速度的步骤包括:根据所述第一转速传感器实时采集的所述滚筒的实际转速或所述第一扭矩输出器的输出转速,计算与所述滚筒的实际转速或所述第一扭矩输出器的输出转速相匹配的所述车体的理论行进速度;通过对所述第二转速传感器采集的所述第二扭矩输出器的输出转速的闭环控制,以使所述车体的实际行进速度与所述车体的理论行进速度一致。
16、在一些实施例中,所述第二扭矩输出器包括行走液压马达,所述行走驱动机构还包括行走液压泵,与所述行走液压马达通过液压油路连通,所述第一扭矩输出器包括扫雷作业液压马达,所述链枷式扫雷装置还包括扫雷作业液压泵,与所述扫雷作业液压马达通过液压油路连通,所述行走液压泵和所述扫雷作业液压泵共用动力源;其中,所述控制方法还包括:调整所述行走液压泵和所述扫雷作业液压泵中的至少一个的输出排量,以实现对所述动力源对所述行走液压泵和所述扫雷作业液压泵的输出功率的分配。
17、根据本公开实施例,控制器根据扫雷作业中所述滚筒的实际转速,自动地通过所述行走驱动机构调整所述车体的行进速度,使得车体的行进速度能够与滚筒的实际转速相匹配,从而使所述扫雷链锤相邻两次击打地面的间距能够符合预设范围,从而确保扫雷作业深度稳定,减少漏雷,进而改善扫雷率,并减少对操作手的依赖。
技术特征:1.一种扫雷车,其特征在于,包括:
2.根据权利要求1所述的扫雷车,其特征在于,所述链枷式扫雷装置(30)包括与所述滚筒(31)连接的多个扫雷链锤(32),所述控制器(40)被配置为根据所述滚筒(31)的实际转速,通过所述行走驱动机构(20)调整所述车体(10)的行进速度,以使每个扫雷链锤(32)相邻两次击打地面的间距均符合预设范围。
3.根据权利要求1所述的扫雷车,其特征在于,还包括:
4.根据权利要求3所述的扫雷车,其特征在于,所述控制器(40)被配置为接收所述遥控装置(50)传递的对所述扫雷链锤(32)相邻两次击打地面的间距进行设置的设置指令,并根据所述设置指令对所述扫雷链锤(32)相邻两次击打地面的间距进行设置。
5.根据权利要求3所述的扫雷车,其特征在于,所述遥控装置(50)包括遥控器(51)和第一通信电台(52),所述遥控器(51)与所述第一通信电台(52)信号连接,所述扫雷车还包括设置在所述车体(10)内的第二通信电台(12),所述第二通信电台(12)与所述第一通信电台(51)通过无线进行自组网通信。
6.根据权利要求1所述的扫雷车,其特征在于,所述链枷式扫雷装置(30)还包括第一转速传感器(61)和与所述滚筒(31)驱动连接的第一扭矩输出器,所述行走驱动机构(20)包括第二转速传感器(62)和与行走机构(11)驱动连接的第二扭矩输出器;所述控制器(40)被配置为根据所述第一转速传感器(61)实时采集的所述滚筒(31)的实际转速或所述第一扭矩输出器的输出转速,计算与所述滚筒(31)的实际转速或所述第一扭矩输出器的输出转速相匹配的所述车体(10)的理论行进速度,通过对所述第二转速传感器(62)采集的所述第二扭矩输出器的输出转速的闭环控制,以使所述车体(10)的实际行进速度与所述车体(10)的理论行进速度一致。
7.根据权利要求6所述的扫雷车,其特征在于,所述第二扭矩输出器包括行走液压马达(21),所述行走驱动机构(20)还包括行走液压泵(22),与所述行走液压马达(21)通过液压油路连通,所述第一扭矩输出器包括扫雷作业液压马达(33),所述链枷式扫雷装置(30)还包括扫雷作业液压泵(34),与所述扫雷作业液压马达(33)通过液压油路连通,所述行走液压泵(22)和所述扫雷作业液压泵(34)共用动力源;
8.根据权利要求7所述的扫雷车,其特征在于,还包括发动机(13)、联轴器(14)和分动箱(15),所述发动机(13)通过所述联轴器(14)与所述分动箱(15)连接,所述分动箱(15)分别与所述行走液压泵(22)和所述扫雷作业液压泵(34)连接。
9.根据权利要求7所述的扫雷车,其特征在于,还包括设置在所述行走液压泵(22)和所述扫雷作业液压泵(34)中的至少一个对应的液压油路上的压力传感器(63),所述控制器(40)与所述压力传感器(63)信号连接,被配置为根据所述压力传感器(63)感测的压力信号计算所述行走液压泵(22)和所述扫雷作业液压泵(34)中的至少一个的实际输出功率。
10.根据权利要求7所述的扫雷车,其特征在于,所述行走液压泵(22)与所述扫雷作业液压泵(34)分别对应的液压油路相互独立。
11.一种根据权利要求1-10任一所述的扫雷车的控制方法,其特征在于,包括:
12.根据权利要求11所述的控制方法,其特征在于,还包括:
13.根据权利要求11所述的控制方法,其特征在于,所述链枷式扫雷装置(30)还包括第一转速传感器(61)和与所述滚筒(31)驱动连接的第一扭矩输出器,所述行走驱动机构(20)还包括第二转速传感器(62)和与所述行走机构(11)驱动连接的第二扭矩输出器;
14.根据权利要求11所述的控制方法,其特征在于,所述第二扭矩输出器包括行走液压马达(21),所述行走驱动机构(20)还包括行走液压泵(22),与所述行走液压马达(21)通过液压油路连通,所述第一扭矩输出器包括扫雷作业液压马达(33),所述链枷式扫雷装置(30)还包括扫雷作业液压泵(34),与所述扫雷作业液压马达(33)通过液压油路连通,所述行走液压泵(22)和所述扫雷作业液压泵(34)共用动力源;
技术总结一种扫雷车及其控制方法,扫雷车包括:车体(10),具有行走机构(11);行走驱动机构(20),设置于车体(10),被配置为驱动行走机构(11)在扫雷场地行进;链枷式扫雷装置(30),设置于车体(10),且包括相对车体(10)可转动的滚筒(31)和与滚筒(31)连接的扫雷链锤(32),链枷式扫雷装置(30)被配置为通过驱动滚筒(31)转动,以带动扫雷链锤(32)对扫雷场地的地面进行锤击;和控制器(40),与行走驱动机构(20)和链枷式扫雷装置(30)信号连接,被配置为根据滚筒(31)的实际转速,通过行走驱动机构(20)调整车体(10)的行进速度,以使扫雷链锤(32)相邻两次击打地面的间距符合预设范围。技术研发人员:周天雷,韩文贵,米玉轩,卢冠成,李言,菅浩宇,张幸幸,陈哲,王坤,张霄霄,陈潇洒受保护的技术使用者:徐州徐工道金特种机器人技术有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240801/240369.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表