一种可用于摄像头仿生的多自由度平台的制作方法
- 国知局
- 2024-08-02 13:53:36
本发明涉及机械域,特别涉及机械多自由度平台。
背景技术:
1、摄像机相关技术在不断完善,镜头透镜设计和图像传感器设计都相对完善,对焦变焦也有诸多解决方案。关于摄像机的技术发展,未来的发展趋势在于3d摄影和摄像机的仿生技术。摄像机的仿生技术处于发展阶段,用于机器人的的仿生技术的需求也在逐步显现。一种性能优良的摄像机的仿生技术用于模拟动物眼球是市场急需的。在本公司申请的另一发明专利(申请号2022114504516)中提及摄像头的电磁仿生装置,这种电磁仿生装置体积较小,适合小微型摄像头的眼球仿生。但是电磁作用力有距离限制,并不太适合大中型摄像头。 为满足不同的应用需求,需要不同的摄像机仿生技术解决方案。
2、当前市场上的多自由度平台品种多,运用广。航空航天,汽车制造,机械加工,虚拟现实游戏,3d体感游戏,以及各种需要调整角度的实验室平台都需要用到多自由度平台。这些不同的平台适用于不同领域,自由度需求也各不相同。但这些多自由度平台相对摄像头而言普遍体积太大,尺寸难以做小,不适用于摄像头的眼球仿生。一款外形通用的,设计尺寸可大可小,设计载重可大可小的多自由度平台是市场需要的。
技术实现思路
1、本发明提供一种可用于摄像头仿生的多自由度平台。这种多自由度平台外形具有通用性,尺寸设计可大可小,载重设计可大可小。
2、本发明的样式可参考图1,图2,图3,图4。本发明的核心思路是模拟眼球可在一定锥形视角范围内自由转动。本发明的核心机械原理是球形物体可以绕球心随意旋转。利用拉伸杆轴线过活动平面运动中心的三个以上的球形铰链支撑活动平面。球形铰链的套筒固定在活动平面底面,球形铰链另一端在导轨上随电机带动丝杠旋转而上升或下降。多个球形铰链顺着导轨运动,可以带动活动平面在一定的锥形角范围内运动,也可以整个活动平面平行上升或下降。固定在活动平面上的物体随着活动平面的运动而运动。例如活动平面上固定的是摄像头,则整个装置就可模拟眼球在一定锥形视角范围内运动。
3、本发明的多自由度平台的机械结构,如图4和图5所示,主要包括活动平面,球形铰链,带齿轮的丝杆,球形铰链滑动导轨,带齿轮的电机,平台底座等。
4、多自由度平台的活动平面,如图7和图8所示,其功能是承载物品和固定球形铰链的套筒,带动负载做多自由度运动。活动平面外形无特别要求,其材质用塑料还是金属根据需要而定,需要一定的结构强度。活动平面的运动中心位于活动平面几何中心的平面法线与活塞拉伸杆轴线延长线相交的交点。固定在活动平面下的球形铰链的套筒,套筒内的活塞拉伸杆的轴线必须过活动平面的运动中心,否则活动平台将无法活动。也就是以活动平面的活动中心为原点,平行活动面的面画圆,球形铰链的拉伸轴线处于该圆的辐条方向。
5、多自由度平台的球形铰链包含铰链球头一端和铰链球形凹槽一端。其球头和球形凹槽的位置可互换,本发明中默认球形铰链球头一端带拉伸杆,在活动平面那一侧。球铰链的伸缩可以是一级伸缩或多级伸缩,但级数增加理论上会增加机械误差进而削弱角度调节精度,同时也会增加额外的制造成本。
6、铰链球头一端如图9所示,包含套筒,弹簧,带拉伸杆的球头。 平面下,套筒内为与拉伸杆匹配的滑槽导轨,套筒底部带排气孔。套筒内滑轨形状和拉伸杆的截面形状无限制,可以是方形也可以是圆形,但圆形更易于加工。弹簧放置于套筒内,用于弹压拉伸杆,确保拉伸杆被压进套筒后能及时被弹压出,让球头始终压在铰链球形凹槽内。弹簧的弹力满足将球头压紧在凹槽内就行,其次弹簧的可活动的弹性空间大于拉伸杆拉伸的距离。套筒底部的排气孔,可平衡套筒内外气压差,便于拉伸杆在套筒内自由拉伸。靠近球头的拉伸杆的直径必须小于球头直径,以便带拉伸杆的球头能在球形凹槽内,在一定锥形角范围内自由运动。球形铰链的球心和球形凹槽中心重合,并与活动平面运动中心,拉伸杆轴线三者在同一直线上。球形凹槽的剖视图如图11和图13的所示,球形凹槽的凹槽包括半球形凹槽和一小段与球头等直径圆柱形孔。圆柱形孔是为了球头在凹槽内运动时不易滑出凹槽,同时也便于球头的顶入和拔出。球头易于顶入和拔出的特性,使得这种球形铰链非常易于结合和松开,便于生产和装配。
7、带齿轮的丝杆的功能是带动球形铰链运动和稳定球形铰链,如图10、图11、图12、图13所示。主要功能是将电机的转动转变为球形铰链沿导轨运动,并稳定球形铰链的位置。丝杆的螺纹的间距和精度对整个多自由平台的角度调整和自锁稳定性具有至关重要的作用。螺纹间距越小,精度越高,平台的角度调整越精细,自锁性能越好。但间距的大小还会影响到平台的角度调整的速度。平台角度调整的精细度和调整速度之间需要平衡。
8、球形铰链滑动导轨在图10和图12中可见,可以是直线形,也可以是弧形,其截面可以是圆柱形也可是方形或其他形状。其功能是稳定球形铰链的凹槽开口方向和规定球形铰链的运动轨迹。球形铰链的球心的运动轨迹必须与球形铰链滑动导轨平行。对于直线形导轨,用圆柱形和方形都可以。对于弧形导轨,丝杆与在弧形导轨上的球形铰链之间的距离和夹角都会变化,用方形等非圆形导轨除了能规定铰链的运动轨迹,还能更好的稳定铰链的方向。直线形导轨和弧线形导轨,在运用中各有优缺。
9、直线形运动导轨,如图10所示,其优势在于结构更紧凑,缺点在于活动平面的可活动的锥形角度较小。球形铰链单级伸缩杆长度不能大于活动平面的半径。三角函数的常识可知,单级伸缩杆的直线形导轨的多自由度活动平台的可活动的锥形角度范围极限在于接近±60°。采用多级伸缩杆可适当增大角度调节范围。但当调节范围大于±45°时,整个装置的高度将大于设备的宽度,角度越大,设备高度越高。直线形导轨的位置摆放,要确保球形铰链的铰链球中心位于铰链的运动直线上,这需要和丝杆和铰链凹槽还有直线导轨协同设计。
10、弧线形运动导轨,如图12所示,其优势在弧形导轨可以弥补球形铰链伸缩长度有限的缺点,对于角度调整的范围更大,理论上其角度调节范围可以接近±90°。但角度增加会增加整个设备的宽度和高度。其次弧形导轨上的球形铰链与丝杆之间的距离和夹角变化,会让两者之间的传动和位置锁定更复杂,至少需要增加一个带伸缩杆球形铰链。弧线形导轨的位置摆放,要确保球形铰链的铰链球中心运动轨迹与弧形导轨的弧线平行,这需要和丝杆、丝杆滑块、铰链凹槽,丝杆滑块限位杆、还有弧线导轨协同设计。弧形导轨的弧形半径满足球形铰链伸缩杆的伸缩范围即可,弧形导轨的圆心不一定需要与运动平面的运动中心重合,也就是说弧形导轨的半径可以大于弧形导轨距离运动中心的最短距离。满足需求的前提下,弧形的半径越大,整个机构的尺寸可以做的越紧凑。
11、带齿轮的电机是整个平台的驱动力来源,电机的驱动力和转速是多自由度平台负载大小和角度调整灵敏度的决定性因素之一。微型电机可以通过减速齿轮来增加电机的输出扭矩。电机与丝杆之间用45°齿轮实现直角传动。电机的转速越快,输出扭矩越大,平台的角度调整灵敏越高,负载越大。
12、说明书附图
13、附图展示了本发明专利的基本结构和运用于摄像头眼球仿生的运用场景。
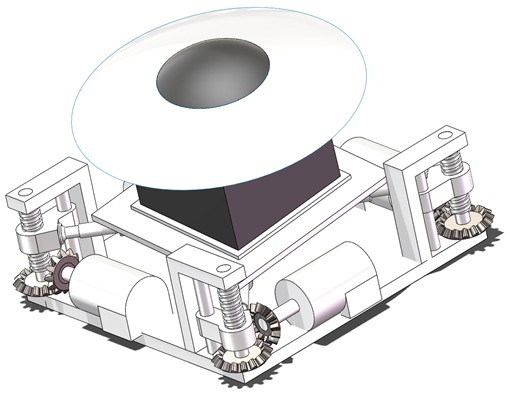
14、图1为直线形导轨的摄像头眼球仿生装置。
15、图2为弧线形导轨的摄像头眼球仿生装置。
16、图3为模仿动物眼球的摄像头模组。
17、图4为直线形导轨的多自由度平台。
18、图5为弧线形导轨的多自由度平台。
19、图6为直线形导轨的多自由度平台去掉活动平面后的机构。
20、图7为多自由度活动平台的带着球形铰链一端的活动平面。
21、图8为活动平面的底视图。
22、图9为球形铰链的带拉伸杆球头一端。
23、图10为直线导轨、丝杆、球形铰链凹槽一端的装配图。
24、图11为直线导轨、丝杆、球形铰链凹槽一端的装配图,关于凹槽的剖视图。
25、图12为弧线导轨、丝杆、丝杆滑块、球形铰链凹槽一端的装配图。
26、图13为弧线导轨、丝杆、丝杆滑块、球形铰链凹槽一端的装配图,关于凹槽的剖视图。
本文地址:https://www.jishuxx.com/zhuanli/20240801/240981.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表