永磁同步电机伺服系统电流环解耦控制方法、装置及介质与流程
- 国知局
- 2024-08-02 16:01:44
本申请涉及电机控制,特别涉及一种永磁同步电机伺服系统电流环解耦控制方法、装置及介质。
背景技术:
1、为了提高永磁同步电机伺服系统的干扰抑制性能,现有技术《extended stateobserver based current decoupling control for pmsm》通过引入扩张状态观测器来估计电流方程中的干扰并进行前馈补偿,该方法对包括不确定参数和外部干扰在内的集总干扰进行实时估计,使电流环控制获得更快的瞬态响应和更好的干扰抑制能力。但是,扩张状态观测器为线性观测器,对于弱磁工况下时变的非线性强干扰,该方法并不能很好地协调系统快速性和超调的矛盾,最终导致观测器收敛时间长、超调量大、调节时间长等缺点。
技术实现思路
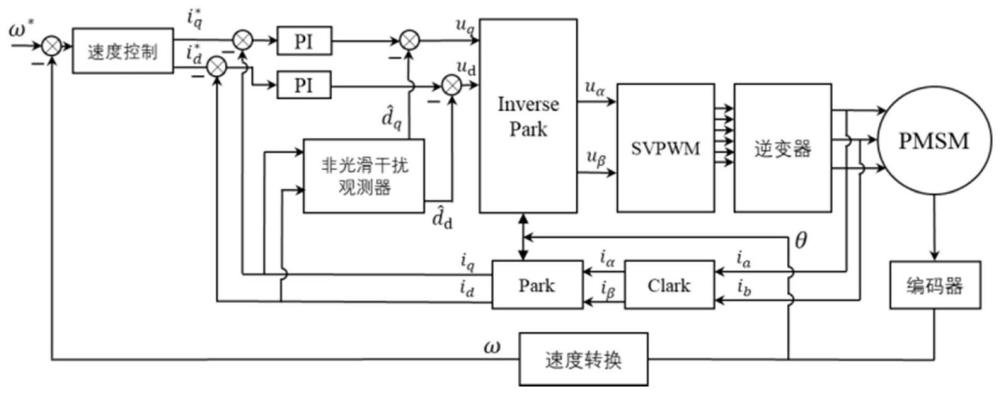
1、本申请提供了一种永磁同步电机伺服系统电流环解耦控制方法、装置及介质,其优点本申请使用非光滑干扰观测器观测电流方程存在的干扰,干扰观测器的收敛更快,能兼顾控制的快速性和超调量,有效地减小弱磁工况下电流环的跟踪误差,提升电流控制效果。。
2、一方面,本申请提供一种永磁同步电机伺服系统电流环解耦控制方法,包括如下步骤:
3、建立包含d轴、q轴集总干扰的永磁同步电机dq轴坐标系模型;
4、根据永磁同步电机dq轴坐标系模型建立非光滑干扰观测器,并根据非光滑干扰观测器获得干扰观测值;
5、将获得的干扰观测值前馈补偿到永磁同步电机控制器的输出上,实现交直轴电流方程的解耦控制。
6、进一步的,永磁同步电机dq轴坐标系模型为:
7、
8、其中,rm为电阻r的标称值;ldm为直轴电感ld的标称值;lqm为交轴电感lq的标称值;id为直轴电流值;iq为交轴电流值;ud为直轴电压值;uq为交轴电压值;ωe为电角速度;ψf为永磁体磁链;dd和dq为直轴和交轴存在的集总干扰,其包含耦合量和参数摄动,其形式如公式(2)所示:
9、
10、进一步的,非光滑干扰观测器的形式如下:
11、
12、
13、其中,sign为符号函数;和为电流id和iq的观测值;和为电流观测值的导数;和为干扰dd和dq的观测值;和为干扰观测值的导数;kd1、kd2、kq1和kq2为观测器增益;α为实数幂。
14、进一步的,α=3/5。
15、又一方面,本申请提供一种永磁同步电机伺服系统电流环解耦控制装置,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序被处理器调用并执行时,实现如上所述的永磁同步电机伺服系统电流环解耦控制方法。
16、又一方面,本申请提供一种计算机可读介质,所述计算机可读介质存储有计算机程序,所述计算机程序被计算机调用并执行时,实现如上所述的永磁同步电机伺服系统电流环解耦控制方法。
17、综上所述,本申请的有益效果有:
18、1.本申请提供的非光滑干扰观测器,针对永磁同步电机控制,相较基于扩张状态观测器的电流环解耦方案,此方案具有速度调节上升时间短、调节时间短、稳态波动小、超调量小的优点,且能保证稳态误差在有限时间内收敛到0;
19、2.本申请使用非光滑干扰观测器观测电流方程存在的干扰,本申请优点在于干扰观测器的收敛更快,能兼顾控制的快速性和超调量,有效地减小弱磁工况下电流环的跟踪误差,提升电流控制效果。
技术特征:1.一种永磁同步电机伺服系统电流环解耦控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的永磁同步电机伺服系统电流环解耦控制方法,其特征在于,永磁同步电机dq轴坐标系模型为:
3.根据权利要求2所述的永磁同步电机伺服系统电流环解耦控制方法,其特征在于,非光滑干扰观测器的形式如下:
4.根据权利要求3所述的永磁同步电机伺服系统电流环解耦控制方法,其特征在于,α=3/5。
5.永磁同步电机伺服系统电流环解耦控制装置,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序被处理器调用并执行时,实现如权利要求1-4任意一项所述的永磁同步电机伺服系统电流环解耦控制方法。
6.一种计算机可读介质,其特征在于,所述计算机可读介质存储有计算机程序,所述计算机程序被计算机调用并执行时,实现如权利要求1-4任意一项所述的永磁同步电机伺服系统电流环解耦控制方法。
技术总结本申请公开了一种永磁同步电机伺服系统电流环解耦控制方法、装置及介质,方法包括如下步骤:建立包含d轴、q轴集总干扰的永磁同步电机dq轴坐标系模型;根据永磁同步电机dq轴坐标系模型建立非光滑干扰观测器,并根据非光滑干扰观测器获得干扰观测值;将获得的干扰观测值前馈补偿到永磁同步电机控制器的输出上,实现交直轴电流方程的解耦控制。本申请使用非光滑干扰观测器观测电流方程存在的干扰,本申请优点在于干扰观测器的收敛更快,能兼顾控制的快速性和超调量,有效地减小弱磁工况下电流环的跟踪误差,提升电流控制效果。技术研发人员:李世华,杨凯峰,成泽宇,李海峰,齐丹丹,李军良,王佐受保护的技术使用者:南京埃斯顿自动化股份有限公司技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240801/249015.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表