一种路空两栖子母自毁式排弹系统
- 国知局
- 2024-08-02 12:13:50
本发明属于排爆机器人,尤其涉及一种路空两栖子母自毁式排弹系统。
背景技术:
1、现代武器弹药高度智能化,除了当时造成目标破坏和人员杀伤之外,还可能故意产生一定数量的未爆弹或等待一定条件才能爆炸的弹药,这类弹药严重影响部队前进,阻碍机场、跑道抢修,威胁人员生命,及时安全地排除关键部位的未爆弹对赢得战争胜利至关重要。
2、战场地形复杂多变,无人机被广泛用于从空中监测和定位潜在的威胁,它们可以携带高分辨率摄像头、红外传感器和其他监测设备,用于搜索和识别爆炸物;但是无人机的隐蔽性差,且没有地面行进能力,因此无法有效且隐蔽的对战场上未爆炸的弹药进行引爆。目前的无人排爆方式主要是通过无人地面车辆,它们通常配备摄像头、传感器和机械臂,使操作人员能够在安全的地方操纵系统,使其能够检测并处理潜在的爆炸物,并通过遥控或自主导航执行任务,但是由于战场地形的复杂性和不确定性,地面无人车辆无法快速准确地抵达未爆弹附近进行排爆作业。
3、为了解决上述问题,现有技术中公开了一种排爆装置及基于聚能射流引爆的排爆机器人(cn212458155u),排爆装置上设置挂载机构,挂载机构将排爆装置与无人机进行连接。挂载机构包括架体,架体上设置连接件,连接件通过回复件与架体连接,回复件用于在连接件与无人机脱离时将连接件回复至原位。回复件可以采用现有的弹性结构,例如可以是回弹钢丝、弹簧等,连接件可以采用挂环等结构,架体用螺钉固定在内侧安装件上,回复件固定在架体上端内侧,通过连接件将排爆装置挂载在无人机上,然后通过无人机进行运载排爆装置至未爆弹药附近进行投放,投放后配合回复件在连接件与无人机脱离时将连接件回复至原位,即投放后回复件自动回弹,防止影响排爆机器人行进。
4、上述方案使用无人机将排爆装置运载至目标地点附近,从而解决了单一采用无人机或无人地面车辆带来的问题。但是上述方案中采用挂环和挂钩来进行连接,导致连接不稳定,极有可能在运载的过程中发生掉落的情况。
技术实现思路
1、本发明的目的在于提供一种路空两栖子母自毁式排弹系统,以解决现有技术中采用挂环和挂钩来进行连接,导致连接不稳定,极有可能在运载的过程中发生掉落的问题。
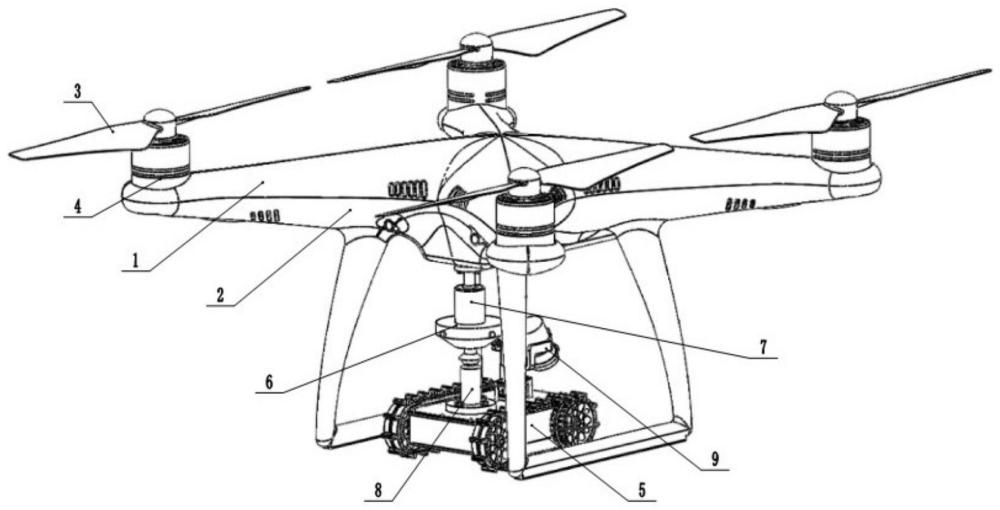
2、为了达到上述目的,本发明的技术方案为:一种路空两栖子母自毁式排弹系统,包括无人机单元、排爆单元和连接单元,所述无人机单元和排爆单元通过连接单元连接;所述排爆单元能够在地面行进并对目标物进行销毁,所述无人机单元包括用于运载所述排爆单元;所述连接单元包括上连接装置和下连接装置,所述上连接装置的上侧与所述无人机单元固定,所述下连接装置的下侧与所述排爆单元固定,所述上连接装置的下侧和所述下连接装置的上侧可拆卸连接;
3、所述上连接装置包括连接本体和若干组连接组件,所述连接本体的顶部与无人机单元连接;所述连接本体内设有竖向的定位孔;所述连接本体的周向设有若干组水平的连接孔,所述连接孔与连接组件一一对应;每组所述连接组件包括弹性件和连接件,所述连接件和弹性件位于所述连接孔内,所述弹性件的一侧与所述连接孔固定,另一侧与所述连接件固定;所述连接件能够在所述所述连接孔内移动;
4、所述下连接装置包括顶帽、导向杆、滑块和底座,所述底座与所述排爆单元连接,所述底座的顶部与顶帽的底部通过导向杆连接,所述滑块的中心设有导向孔,所述滑块滑动连接在所述导向杆上;所述滑块的上侧和下侧均设有圆台结构,两个圆台结构的大径端直径相等并位于相互靠近的一侧;所述顶帽的底部设有与所述滑块上侧的圆台结构匹配的凹槽,所述圆台结构大径端的直径等于顶帽的直径;所述顶帽和滑块能够在所述定位孔内滑动;
5、所述弹性件在自然状态下,所述连接件的一端能够伸入所述顶帽的底部并对顶帽进行支撑。
6、进一步,所述无人机单元包括无人机本体、以及设于无人机本体上的飞行控制系统和飞行执行系统,所述飞行控制系统包括飞行主控器以及与飞行主控器连接的第一数据传输模块、第一外部感知模块、内部感知模块和飞行执行控制模块,所述第一数据传输模块与远程控制终端和飞行主控器连接并进行数据交互;所述第一外部感知模块用于感知外部飞行环境并将外部飞行信息发送给所述飞行主控器;所述内部感知模块用于感应无人机的内部自身信息并将内部信息发送给所述飞行主控器,所述飞行主控器对第一数据传输模块、第一外部感知模块和内部感知模块传输的信息进行处理并通过飞行执行控制模块控制飞行执行系统进行飞行状态的调整。
7、进一步,所述排爆单元包括地面控制系统、地面执行系统和自毁系统,所述地面控制系统包括地面主控器以及与地面主控器连接的第二数据传输模块、第二外部感知模块和地面执行控制模块,所述第二数据传输模块与所述无人机单元和地面主控器连接并进行数据交互;所述第二外部感知模块用于感知外部环境并将外部地面信息发送给所述地面主控器;所述地面主控器与所述自毁系统连接并用于启动自毁系统对目标物进行销毁;所述地面主控器对第二数据传输模块和第二外部感知模块传输的信息进行处理并通过地面执行控制模块控制地面执行系统进行行走、调整自毁系统的射流角度。
8、进一步,所述飞行执行系统包括四组旋翼电机,每组所述旋翼电机分别带动无人机本体的旋翼转动;所述内部感知模块包括转速传感组件和惯性测量组件;所述转速传感组件用于检测四组所述旋翼电机的转速,所述惯性测量组件用于检测无人机本体的平衡状态。
9、进一步,所述第一外部感知模块包括第一摄像头、定位器和第一测距传感器,所述第一摄像头用于实时监测周围环境,所述定位器用于实时定位无人机本体的位置信息,所述第一测距传感器用于测量无人机本体与目标物之间的距离信息。
10、进一步,所述第二外部感知模块包括第二摄像头和第二测距传感器,所述第二摄像头用于实时监测周围环境,所述第二测距传感器用于测量自毁系统与目标物之间的距离信息。
11、进一步,所述地面执行系统包括行走组件和调姿组件,所述行走组件用于带动所述自毁系统行进,所述调姿组件用于调整自毁系统的射流角度。
12、本技术方案的工作原理在于:无人机单元和排爆单元通过连接单元连接,远程控制终端向无人机单元的第一数据传输模块发送控制指令,由无人机单元搭载排爆单元飞行到指定空域后降落。
13、降落完成后(也即是排爆单元位于地面上),远程控制终端向无人机单元发送无线控制指令,无人机单元先降低一定飞行高度,上连接装置在下降的过程中,连接件经过滑块上侧时,滑块上侧的圆台结构的倾斜外周会对连接件进行挤压,连接件向连接孔内移动,弹性件被压缩;当连接件运动至滑块下侧时,弹性件会向外伸长,连接件向连接孔外移动。
14、远程控制终端向无人机单元发送无线控制指令,无人机单元再升高一定飞行高度,上连接装置在上升的过程中,连接件会推动滑块的下侧一起上升,直至滑块上侧的圆台结构位于顶帽底部的凹槽内,滑块此时不能再继续上升。连接件继续上升,此时滑块下侧的圆台结构会对连接件进行挤压,弹性件被压缩,并且连接件从滑块的外周直接滑动至顶帽的外周,不再移动至顶帽的底部。连接件继续上升,顶帽从定位孔内脱离,上连接装置和下连接装置分离。
15、通过远程控制终端向无人机单元发送无线控制指令,无人机单元接收后向排爆单元发送无线控制指令,控制行走组件行进。
16、通过无人机单元的第一外部感知模块感应的信息,控制排爆单元行驶至目标物附近。
17、遥控无人机单元撤离至安全地点。
18、无人机单元与排爆单元进行起爆参数设置、对码、解保操作,并向远程控制终端返回点火请求。
19、远程控制终端下发点火指令后,由调姿组件进行射流角度的调整,引爆自毁系统,完成排爆任务。
20、本技术方案的有益效果在于:
21、①本技术方案连接单元能够稳定地实现无人机单元对排爆单元的搭载,在搭载时,通过多组连接件对顶帽进行支撑,并配备定位孔来对顶帽的运动进行导向,连接件基本上不会受到周向的力,因此弹性件不会发生伸缩,从而保证搭载的稳定性,不会存在搭载过程中两者出现分离的情况。
22、②本技术方案中通过滑块下侧的圆台结构来实现滑块至顶帽的过渡,连接件直接从下侧的圆台结构运动至顶帽上,从而实现脱离。整个结构简单,不需要其他控制机构来实现,只需要无人机单元的升降即可完成。
23、③本技术方案中排爆单元可以行进至目标物附近,然后通过调姿组件对射流角度进行调整,然后直接启动自毁,对目标物进行爆炸,完成排爆任务。
本文地址:https://www.jishuxx.com/zhuanli/20240802/235122.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表