一种热烧蚀后的弹体回收方法
- 国知局
- 2024-08-02 12:16:48
本发明涉及回收,特别是涉及一种热烧蚀后的弹体回收方法。
背景技术:
1、当导弹超音速飞行时,会发生气动加热现象,气动加热所产生的高温,会降低材料的强度极限和结构的承载能力,严重情况下会烧毁弹体结构、破坏气动外形影响导弹的飞行安全,弹体需要进行热防护设计。舱体外表面进行防热设计时,通过舱体表面的防热材料分解升华消耗热量,防热材料会发生烧蚀碳化现象,外部热量会向舱内传导,使舱内的环境温度升高,影响仪器设备的正常工作,舱体内部也会进行隔热设计,隔热材料会经历高温环境,材料特征会发生改变,此外弹上凸起物如天线、吊挂,翼、舵根部缝隙等区域无法采取有效的热防护措施,也会发生热烧蚀现象。热防护设计不仅需要仿真分析和地面热防护试验支撑,还需要空中飞行试验验证,获得飞行试验温度数据和气动加热烧蚀现象至关重要。
2、飞行试验时,当导弹以较大的落角和较高的速度撞击目标或地面时,大量的动能将转化为热能和变形能,由于结构材料的本身限制,弹体结构在高速冲击下承受到极大的压力和剪切力,会发生断裂和破碎,碎片飞散或侵入地面以下,很难找到完整结构,因此无法获得经历了高温环境后弹体表面及防/隔热材料的烧蚀情况,也不能有效与地面热防护试验结果和仿真结果对比。同时,当弹上一些实测数据无法直接通过遥测设备传输到地面时,通常在舱内安装图像和数据记录仪,虽然记录仪在设计上考虑抗冲击能力,记录仪通常会出现变形和损坏,也不能获得有效的数据。
3、专利文献101298974b(申请号:200710137264.1)公开了一种空空导弹试验导弹的主动回收控制方法,通过在导弹内部增加主动回收控制模块和内置降落伞,完成主动回收。专利文献110966898a(申请号201911242482.0)公开了一种考核飞行试验结束后到弹弹体回收系统,利用主降落伞和自主充气浮囊进行回收。两个专利均通过主动回收装置对弹体实施回收,针对导弹弹体空间和重量均受限,无法通过主动装置回收。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种热烧蚀后的弹体回收方法。目的是在不影响飞行试验考核项目和不需要回收装置前提下,仅依靠对飞行轨迹控制方法实现对弹体减速和控制落地姿势,实现对热烧蚀后的弹体主要结构回收。所述一种热烧蚀后的弹体,是指飞行器在超音速飞行时会带来气动加热现象,超音速飞行器飞行过程中,周围空气受到强烈的压缩和剧烈的摩擦作用,导致飞行器周围的空气温度升高,此高温气体和飞行器表面之间产生巨大温差,在大气层中高速飞行而产生的热能传递方式即为“气动加热”。对于超音速飞行器来说,飞行器表面会发生烧蚀现象,根据飞行状态,烧蚀的位置及烧蚀后的形貌特征会有所不同,飞行结束后的弹体结构被定义为一种烧蚀后的弹体。
2、本发明方法具体包括以下步骤:
3、步骤1,在导弹发射后,导弹通过弹上定位算法解算到一个目标点坐标,并引导导弹向目标点飞行,所述目标点坐标为弹上解算的目标点坐标;
4、所述弹上定位算法可以参考如下参考文献:
5、《美军新型反辐射导弹aargm-er性能分析与研究》,战术导弹技术,2023(7),文献2.3节,2022年11月30日,aargm-er反辐射导弹完成了第四次实弹飞行试验,成功击中了一个具有作战代表性的移动海上目标。此次试验测试了aargm-er反辐射导弹探测、识别、定位并有效打击远程关键目标的能力,并验证了其与海上机动目标有效作战的能力。
6、《弹载单基测角被动定位滤波算法研究》,空天防御,2020(1),该文献摘要中描述了被动定位技术,其中推最小二乘法、扩展卡尔曼滤波法、无迹卡尔曼滤波法、有限差分扩展卡尔曼滤波法、自适应扩展卡尔曼滤波法滤波方法和所述弹上定位算法意思相同。
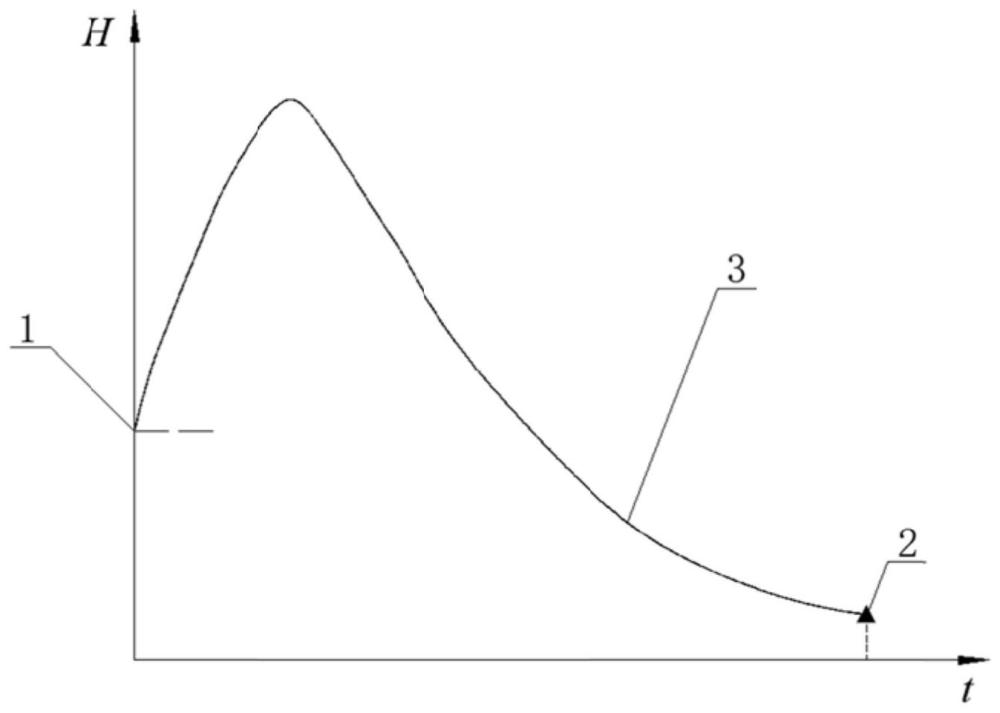
7、步骤2,导弹攻击的目标为地面目标,在飞行末端,在降高阶段,为了实现回收,对导弹的飞行轨迹提出要求,导弹飞行轨迹在高度上最佳形式为呈向下凸出形状,来保证飞行轨迹上每一时刻的弹道倾角的绝对值大于弹目视线角的绝对值,并且导弹以正攻角飞行,通过气动升力和阻力降低向下和向前的飞行速度;
8、步骤3,在飞行末端,为了实现导弹能在攻击目标后有足够的距离由俯冲改为升起,对于导弹的倾角,期望在一个小的弹道倾角飞向目标,将弹道倾角控制在一定范围(一般取值为15°)内,具体的倾角调整方法和策略由导弹控制算法来实现,通过对落地倾角θqw的约束,得到期望的攻击角度;
9、步骤4,在导弹到达解算的目标点之前,在高度轨迹上,当导弹高度和目标高度差为h时,导弹更新目标点坐标值:导弹不再以解算的目标点作为目标,而是以当前高度点的坐标作为目标的坐标,所述当前高度点为设计目标点;
10、导弹在到达目标点前,导弹是以一定的角度向下飞行,为了实现所描述的回收,导弹由向下飞行时需要拉起向上飞行,使导弹不与地面提前发生碰撞,在高度上需要有一定的距离完成该动作执行,该距离为h值,该设计目标点的坐标在导弹的飞行轨迹上,当前高度点为设计的目标点。
11、步骤5,导弹在以设计目标点坐标作为目标飞行时,不再对弹道倾角约束,设计目标点已在导弹后方;
12、步骤6,导弹飞行到设计目标点下方后,不再通过导引头提供的导引信号进行引导,开始通过过载控制指令进行理论计算引导导弹飞行;
13、步骤7,导弹飞过设计目标点后,弹目视线角qb由负值突跃为正值后逐渐较小为正值,弹道倾角θ仍为负值,逐渐增大,此飞行阶段产生正过载指令ayc,控制导弹产生向上力,当升力为一定值时,导弹开始向上飞行,此时弹道倾角θ=0;
14、所述弹目视线角指导弹指向目标的方位线与惯性基准线之间的角度,在俯仰上对应上下和偏航上对应左右,统一就叫弹目视线角。
15、步骤8,弹体从高度上的第一个波峰高点开始第二次向下飞行,在向下飞行过程中,由于qb-θ>0控制系统会给出正过载指令,弹体升力逐渐增加;在航向上,速度逐渐在减小,相对应升力也逐渐减小,当速度减小到失速速度时,导弹飞行时的升力小于重力,导弹会落到地面;
16、步骤9,在导弹触地时刻,导弹飞行姿态为正攻角,舵面位于弹体的尾部,舵面的外包络尺寸大于弹身包络尺寸,弹翼位于弹体的中部,外包络尺寸大于弹身的外包络尺寸,舵面首先与地面发生碰撞,然后弹翼与地面发生碰撞,最后头部与地面发生碰撞;
17、步骤10,在触地后,弹体法向速度较小,在航向仍存在剩余速度,通过弹体和地面摩擦,弹体变形吸收最后的动能,最后停止在地面上。
18、步骤3中,所述导弹控制算法包括:
19、导弹的空中实时位置由惯导提供,以弹目距离r为极轴,以俯仰视线角qb为极角,建立极坐标系,则弹目距离r和俯仰视线角qb计算公式为:
20、
21、
22、其中(xm,ym)为导弹在地面坐标系实时位置,(xt,yt)为解算的目标点在地面坐标系固定位置;
23、导弹在空中飞行的飞行轨迹方程为:
24、
25、
26、其中d是积分符号,x是坐标系上x轴方向的位移,y是坐标系上y轴方向的位移,t是时间,vm为导弹实时矢量速度,θm为弹道倾角,表示速度矢量与惯性系水平面的夹角;
27、导弹末端,已进入无动力飞行,简化飞行模型为:
28、
29、
30、
31、其中qbm是某一时刻的弹目视线角;a为导弹加速度;这个整体表示视线角的导数,就是视线角的变化速率。不用单独说明dq中的q,这个q也是视线角的意思。qbm这个也是视线角的意思,表达为每一时刻的视线角具体值,是在角度约束控制时引用这个值,其他的地方没有用。
32、参考论文《导弹同时弹着指导律研究》,中北大学,2020,其中20-21页;
33、倾角变化率公式为:
34、
35、
36、其中θqw为期望的攻击角度;
37、在某一时刻,速度及高度坐标是已知量,目标点坐标为已知量,求得弹目视线角、弹目距离和弹道倾角随时间的变化率,得到下一时刻弹道参数,通过对倾角θ的变化率约束,得到期望的攻击角度θqw。
38、步骤4中,导弹高度和目标高度差h计算公式为:
39、h=h0-ht
40、其中h0为导弹实时高度,ht为目标点的高度。
41、步骤5中,当导弹飞行到设计目标点坐标附近时,弹目视线角会发生剧烈变化,由稳定的一个负值突跃为正90°后逐渐减小,负值接近等于在未到目标时约束的弹道倾角值:
42、
43、步骤6中,所述通过过载控制指令进行理论计算引导导弹飞行具体包括:
44、ayc=f(qb-θ)
45、其中f是一个函数,f(qb-θ)表示ayc是关于qb-θ的一个函数;
46、其中ayc为法向过载指令,θ为弹道倾角;
47、在俯冲飞行阶段,由于qb>θ,控制系统会给出法向的正过载指令,使导弹产生抬头力矩,飞行时攻角为正,并且逐渐变大,弹体的升力y也随之增加:
48、
49、其中cy为升力系数,ρ为大气密度,v为飞行速度,s参考面积;
50、cy=f(v,α,δz),
51、其中α,δz分别为攻角和侧滑角;
52、导弹飞行时会受到零升阻力和诱导阻力,在攻角状态下导弹升力增加的同时诱导阻力也会增加,随着飞行攻角α的增加,弹体受到总的阻力也会增大;
53、随着升力增加,天向速度逐渐减小到达零点,弹道倾角第一次出现为θ=0的情况,导弹飞行轨迹在高度上出现到第一个波谷低点,在该阶段,向下的动能将被消耗,同时由于飞行阻力的增加,在航向的飞行速度也开始降低。
54、步骤7中,在导弹向上飞行过程中,弹目视线角qb仍逐渐较小,且仍为正值,弹道倾角θ在由0开始逐渐增大,正过载指令ayc逐渐减小,在飞行轨迹上会出现临界位置,即qb-θ=0,此时刻正过载指令为0,随后,弹道倾角θ开始逐渐减小,此过程qb弹目视线角也逐渐较小,弹目视线角qb减小的速率小于弹道倾角θ减小的速率,当qb-θ<0时,控制系统给出负过载指令,此时弹体开始减速向上飞行,弹道倾角θ一直在减小,当第二次θ=0时,导弹飞行轨迹在高度上出现到第一个波峰高点。
55、本发明还提供了一种软件控制系统,所述系统存储有计算机程序或指令,当所述计算机程序或指令被运行时,实现所述一种热烧蚀后的弹体回收方法。
56、有益效果:本发明回收方法简单,不需要额外回收装置下,在不影响飞行考核试验项目和不需要回收装置前提下,仅依靠控制飞行轨迹方法实现导弹减速和控制落地姿势,能对烧蚀后的弹体的主要结构回收。
本文地址:https://www.jishuxx.com/zhuanli/20240802/235380.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表