一种基于石墨烯的双向致动复合薄膜及其应用
- 国知局
- 2024-08-02 12:16:52
本发明属于新型智能致动器领域的一种薄膜,具体涉及了一种基于石墨烯的双向致动复合薄膜及其应用。
背景技术:
1、基于丰富的致动材料如形状记忆聚合物、液晶弹性体、导电聚合物和碳基材料等开发出能够响应不同外部刺激的致动器与传统机械致动器相比,具有柔性变形、远程控制和生物适应性,可以实现游泳、爬行等仿生运动。目前,基于碳基材料的致动器由于制备方法简单、工艺成本低廉、生物相容性较高的优点,在简易生物仿生运动方面出现了一些应用探索,还在环境污染指示、软体机器人领域有着广泛的应用前景。
2、但是,目前的大多数致动器均基于单层致动策略,导致致动器的变形方向单一而限制致动器的应用。同时,目前大多数致动器由于其变形程度较小且不明显,在环境污染指示应用方面有所欠缺。另外,由于致动器的厚度过小,导致其承载性非常弱,难以获得良好的机械性能,这严重制约了致动器在人工肌肉领域的深入应用。因此,亟需探索实现双向弯曲以及机械性能改进的新途径,获得兼顾变形范围、响应速度和卓越机械性能的致动器,以及用此致动器制作的对环境中特定有机溶剂指示作用以及作为人工关节、仿生动物动作的应用方法也亟需研究。
技术实现思路
1、本发明的目的是针对现有技术存在的上述问题,提供一种基于石墨烯的双向致动复合薄膜及其应用,针对大多数致动器在环境污染指示应用方面的欠缺,以及机械性能差制约其在人工肌肉领域应用的问题,提供了一种基于双向复合薄膜的指示环境中特定有机溶剂的双向开关电路以及复合薄膜作为人工关节、仿生动物动作的应用方法。
2、一、一种基于石墨烯的双向致动复合薄膜
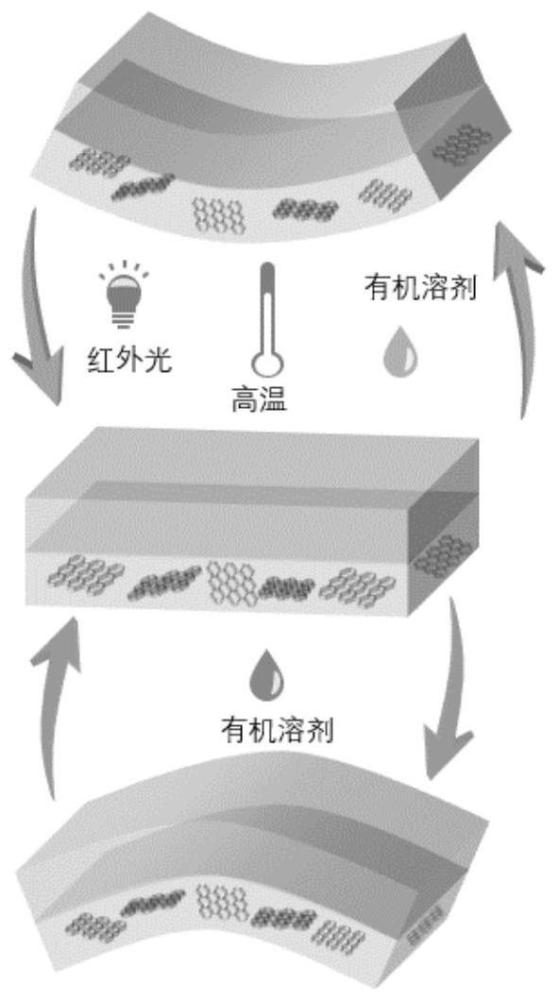
3、所述基于石墨烯的双向致动复合薄膜包括上层薄膜和下层薄膜,上层薄膜与下层薄膜层叠布置;所述上层薄膜与下层薄膜在有机溶剂/光照/温度的作用下发生不同程度的变形,使得复合薄膜双向弯曲变形。
4、即,对光照/温度/有机溶剂作为激励源,复合薄膜在有机溶剂的作用下会产生溶胀差,在有机溶剂刺激下产生双向响应。复合薄膜中的石墨烯在光照的作用下发热,使得复合薄膜在温度的作用下会产生膨胀差。具体地,当接触到有机溶剂时,两层薄膜的溶胀程度不同,从而产生弯曲的动作,且可以根据两层薄膜对同一种有机溶剂的不同溶胀程度而产生不同方向与程度的弯曲变形;当外界环境温度升高时,两层薄膜的热胀程度不同,从而产生弯曲的动作;当红外光照射时,复合薄膜中的石墨烯产生光热效应,导致温度升高,产生热胀差值导致产生弯曲的动作,实现对外界刺激的反馈。
5、优选地,所述的基于石墨烯的双向致动复合薄膜在响应有机溶剂刺激时可以获得两个方向的弯曲变形,采用双层致动策略,上下层均发生溶胀作用,当上层薄膜溶胀大于下层薄膜时,向下弯曲,当下层薄膜溶胀大于上层薄膜时,向上弯曲,且复合薄膜接触有机气体时也会发生变形。
6、所述上层薄膜由石墨烯与聚二甲基硅氧烷混合而成。
7、所述聚二甲基硅氧烷和石墨烯的混合物与石墨烯的质量比为100:2-15。
8、所述下层薄膜为聚偏二氟乙烯。
9、所述上层薄膜与所述下层薄膜的厚度比为10:1-2。
10、二、一种基于石墨烯的双向致动复合薄膜的制备方法
11、1)将聚偏二氟乙烯粉末与分散剂混合搅拌均匀,再超声消泡后注入定制的模具中,然后放入高温烘箱在高温下静置促进分散剂的挥发,使聚偏二氟乙烯固化成膜,获得上层薄膜;
12、2)将聚二甲基硅氧烷主成分剂、石墨烯和溶剂搅拌均匀,然后加入聚二甲基硅氧烷固化剂再次搅拌均匀并加热除去溶剂,接着将混合物置于超声装置中进行消泡处理,将消泡处理后的混合物注入带有制作好下层薄膜的定制模具当中,放入高温烘箱在高温下静置使其加速固化成型,烘干以后两层薄膜自然粘合,获得基于石墨烯的双向致动复合薄膜。
13、所述1)中,所述分散剂为n,n-二甲基甲酰胺、n-甲基吡咯烷酮或二甲基亚硫脲。
14、所述1)中,搅拌时间为60min,转速为1500rpm,超声处理时间为20min,高温静置温度为60℃,时间为2h。
15、所述2)中,所述溶剂为环己烷、正己烷、n,n-二甲基甲酰胺或四氢呋喃,两次搅拌时间均为30min,转速均为1500rpm。
16、所述聚二甲基硅氧烷主成分剂与固化剂的质量比为10:1,去除溶剂的加热温度为80℃,超声处理时间为20min,高温静置温度为60℃,时间为24h。
17、优选地,所述定制模具为玻璃板与聚酰亚胺胶带制成的薄槽,通过调整聚酰亚胺胶带的层数调节复合薄膜的层数,在制备上层薄膜时需要在下层薄膜制作完成后通过增加胶带层数的方法制作适用的模具。
18、三、一种基于石墨烯的双向致动复合薄膜的应用
19、所述一种基于石墨烯的双向致动复合薄膜在电路、人工肌肉、环境污染监测传感、软体机器人中的应用。
20、四、一种电路
21、所述电路中包含所述的一种基于石墨烯的双向致动复合薄膜,基于石墨烯的双向致动复合薄膜在有机溶剂/光照/温度的作用下产生双向弯曲,使得所述电路处于不同通断状态。
22、五、一种仿生软体机器人
23、所述仿生软体机器人中包含所述的一种基于石墨烯的双向致动复合薄膜。
24、优选地,所述的基于石墨烯的双向致动复合薄膜具有较大的弯曲范围,在有机溶剂的刺激下,当样品长宽比为12/5时,可实现-90°到120°角度范围的变形,当样品长宽比为20/5时,可获得最大630°的变形。
25、优选地,所述的基于石墨烯的双向致动复合薄膜具有快速的响应时间,在正己烷的刺激下,实现最大变形的最短时间仅为1.88s。
26、优选地,所述的基于石墨烯的双向致动复合薄膜具有优异的机械性能,在正己烷的刺激下,可以稳定地提升自身重量180倍的重物。
27、本发明基于具有不同刺激下表现出两种弯曲方向的复合薄膜引申出多种应用。基于只有在特定的有机溶剂刺激下复合薄膜才会表现出向第二弯曲方向弯曲的特性,设计并制备了可指示环境特定有机溶剂的双向开关电路。基于复合薄膜优异的机械性能与双向弯曲的特性,设计并制备了具有人工肌肉作用的仿生鸟类人造翅膀挥动模型。
28、与现有技术相比,本发明的有益效果为:
29、本发明设计了一种基于石墨烯的双向致动复合薄膜,所述复合薄膜可以在光照、温度、有机溶剂的刺激下实现两个方向快速弯曲变形,并且具有优异的机械性能;基于以上的特点,制备的可指示环境特定有机溶剂的双向开关电路可以实现对环境中指定有机污染的警报;得益于其优异的机械性能,还能够支持更灵活的、双向挥动的鸟类人造翅膀挥动运动。
技术特征:1.一种基于石墨烯的双向致动复合薄膜,其特征在于,包括上层薄膜和下层薄膜,上层薄膜与下层薄膜层叠布置;所述上层薄膜与下层薄膜在有机溶剂/光照/温度的作用下发生不同程度的变形,使得复合薄膜双向弯曲变形。
2.根据权利要求1所述的一种基于石墨烯的双向致动复合薄膜,其特征在于,所述上层薄膜由石墨烯与聚二甲基硅氧烷混合而成。
3.根据权利要求1所述的一种基于石墨烯的双向致动复合薄膜,其特征在于,所述聚二甲基硅氧烷和石墨烯的混合物与石墨烯的质量比为100:2-15。
4.根据权利要求1所述的一种基于石墨烯的双向致动复合薄膜,其特征在于,所述下层薄膜为聚偏二氟乙烯。
5.如权利要求1所述的一种基于石墨烯的双向致动复合薄膜,其特征在于,所述上层薄膜与所述下层薄膜的厚度比为10:1-2。
6.如权利要求1-5任一所述的一种基于石墨烯的双向致动复合薄膜的应用,其特征在于,所述一种基于石墨烯的双向致动复合薄膜在电路、人工肌肉、环境污染监测传感、软体机器人中的应用。
7.一种电路,其特征在于,所述电路中包含权利要求1-5任一所述的一种基于石墨烯的双向致动复合薄膜,基于石墨烯的双向致动复合薄膜在有机溶剂/光照/温度的作用下产生双向弯曲,使得所述电路处于不同通断状态。
8.一种仿生软体机器人,其特征在于,所述仿生软体机器人中包含权利要求1-5任一所述的一种基于石墨烯的双向致动复合薄膜。
技术总结本发明公开了一种基于石墨烯的双向致动复合薄膜及其应用。复合薄膜主要包括上下两层薄膜;下层为聚偏二氟乙烯,上层薄膜由石墨烯与聚二甲基硅氧烷组成。复合薄膜具有响应速度快、变形范围大、机械性能优异以及成本较低、制备简单等优点。这种复合薄膜可以对有机溶剂、温度、光照等多种刺激响应。由其对特定有机溶剂的反向弯曲方向的特点,可制成有机溶剂指示作用的双向开关电路以指示环境中存在的特定有机溶剂。另外,其优异的机械性能可以支撑其作为人工关节、仿生动物动作的应用。技术研发人员:宋秀菊,冯毅雄,陈美好,洪兆溪,胡炳涛,谭建荣受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240802/235385.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表