一种运载火箭级间同步分离控制方法
- 国知局
- 2024-08-02 12:28:37
本发明属于机电系统动力学与控制领域,具体涉及一种运载火箭级间同步分离控制方法。
背景技术:
1、级间分离是运载火箭成功发射中的关键一环,是将下面级抛弃,上面级继续飞行的过程。随着人类对外太空的探索越来越频繁,对航空运载器提出了新的要求。可回收式运载火箭是当前各国航天领域的研究热点。可重复使用火箭能够大幅度降低发射成本,但同时对火箭级间分离系统也提出了新的要求。
2、spacex公司的猎鹰9号系列火箭搭载了一种基于气动技术的级间分离方式,并成功将一子级回收。这种新型的级间冷分离方式,具有分离迅速,对一子级的损伤小,并且能够重复使用的优点。因此研究此种级间分离方式,并将其应用在小中大型火箭上,对实现可重复使用是十分有意义的。
3、目前,国内外针对基于气动技术的火箭级间分离系统的研究尚少。蓝箭航天发明了一种基于单气缸和多气缸的分离系统,但尚未对其分离系统进行建模分析。尤其是针对多气缸的分离系统,各气缸的同步性,影响分离两级之间的相对姿态角大小。若两级的相对姿态角过大,则可能会引起两级发生碰撞,进而引起发射失败。因此,研究多气缸分离系统的气缸同步分离意义重大。
4、针对多气缸同步分离的研究方法,主要是集中在基于偏差耦合的主从控制,并且应用领域有限。而多气缸的级间分离系统属于典型的过驱动系统,并且气动系统存在着强非线性和不确定性,要实现多气缸同步控制,急需开发一种新的控制算法。针对过驱动系统的控制问题,主要是使用控制分配的方法实现,目前也主要应用在飞行器姿态控制领域,以及大型锻压机的多液压缸调平控制领域中,而在多气缸级间分离系统同步控制领域的研究还处于一个起步阶段。现有技术(赵叔豪.基于控制分配的过驱动系统非线性控制方法研究[d].天津理工大学,2023.)研究了控制分配方法在多缸液压机中的调平应用,但未提供一种用于气动同步分离系统的控制方法。因此设计开发一种有效的气动同步控制系统,并借鉴控制分配算法在卫星和飞行器上的研究成果,再运用合适的控制方法实现对多气缸的运载火箭级间分离系统同步分离控制,提高火箭级间分离的可靠性,是一个值得研究的崭新的学术课题。
技术实现思路
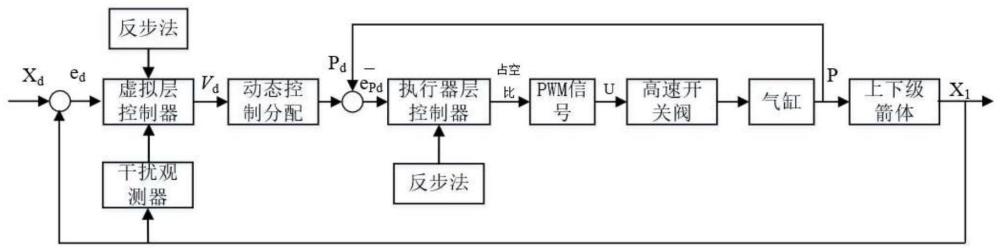
1、本发明提出了一种基于控制分配的同步分离控制方法,首先建立基于干扰观测器的虚拟层反步虚拟控制器,再通过动态控制分配,将虚拟控制律分配到内环,形成执行器层控制器的控制目标,最后设计基于反步控制的内环执行器控制律,实现同步分离控制,该旨在解决火箭在级间分离时由于外界的干扰及自身参数的不确定导致的分离作动器不同步的问题,探索一种有效的多气缸分离系统同步控制技术,弱化干扰的影响,从而提高级间分离的可靠性。
2、本发明至少通过如下技术方案之一实现。
3、一种运载火箭级间同步分离控制方法,包括以下步骤:
4、步骤1、构建由高速开关阀控制的级间气动分离系统;
5、步骤2、建立四气缸级间分离系统的数学模型;
6、步骤3、构建基于控制分配的分层控制器;
7、步骤4、进行火箭级间分离系统同步分离仿真验证。
8、进一步地,所述级间分离系统包括四个及以上的气缸和相应的推杆,气缸均匀分布在级间段的内壁上,所述推杆与上面级的连接面在上面级与级间段的分离面上,通过推杆将一二级箭体分开;
9、每个气缸的进排气由两个高速开关阀组成,一个负责进气腔的进气,一个负责进气腔的排气;
10、所述气动分离系统包括气瓶、减压阀、气容和管路,为气缸提供高压气体。
11、进一步地,步骤2中,根据箭体动力学建立四气缸级间分离系统的数学模型,包括以下步骤:
12、步骤2-1、根据分离过程中箭体受力,分离体六自由度欧拉方程的动力学模型为:
13、
14、式(1)中m1为下面级分离体质量;m2为上面级分离体质量;v1、v2为下面级和上面级的分离子级的速度矢量;ω1、ω2为下面级和上面级的角速度矢量,j1、j2为下面级和上面级分离子级的转动惯量矩阵,fi为气缸i的推力矢量;ψ1,θ1,γ1和ψ2,θ2,γ2分别为下上分离子级的俯仰角、偏航角、滚转角,g1、g2为分离体在地面坐标系下的重力;ff为下面级发动机残余推力;mi为气缸i的推力力矩;fd1、fd2为外界的干扰力;md1、md2为外界干扰力矩;
15、由于分离系统的约束,实际分离可控自由度只有三个:沿箭体轴向的位移、相对俯仰角以及相对偏航角,因此,六自由度模型可进一步简化为三自由度模型,分别取下、上子级运动状态变量其中,为下、上子级的加速度,为下、上子级偏航角加速度,为下、上级俯仰角加速度;
16、分离体三自由度动力学模型:
17、
18、
19、式中,e1=en1+δe1,e2=en2+δe2;en1=diag(m1,jy1,jz1)和en2=diag(m2,jy2,jz2)为系统正常部分,m1、m2为分离体的质量,jy1、jz1、jy2、jz2分别为上下分离子级绕y轴和绕z轴的转动惯量;δe1=diag(δm1,δjy1,δjz1),δe2=diag(δm2,δjy2,δjz2)为系统的不确定性部分,δm1,δm2为分离子级质量不确定性,δjy1,δjy2,δjz1,δjz2为分离子级转动惯量的不确定性,dn1、dn2∈r3×1为系统外部干扰,η=[f1 f2 f3 f4]t为气缸分离力,r1为气缸安装位置到箭体轴线的距离,b1、b2为安装矩阵;
20、选取相对运动状态变量其中,为下、上子级的轴向速度,为下、上分离子级的偏航角速度,为下、上分离子级的俯仰角速度,将系统转换为状态空间模型:
21、
22、其中为控制效率矩阵,为集总扰动,为系统相对运动速度向量,为系统相对运动加速度向量,由式(4)可见,输入量η维数大于状态量x2的维数,系统是一个典型的过驱动系统;
23、由于相对转动角度较小,每个气缸的相对位移按下式计算为:
24、
25、式中,xa、xb、xc、xd为4个气缸的相对位移,x21为分离子级轴向相对位移,在分离体的相对姿态角很小时,假设sinψ21≈ψ21,sinθ21≈θ21,其中ψ21=ψ2-ψ1,θ21=θ2-θ1分别为分离子级的相对偏航角和相对俯仰角。
26、进一步地,建立四气缸级间分离系统的数学模型的气动系统动力学,具体如下:
27、建立气动系统动力学模型:由于进气腔的压力远远大于排气腔的压力,且忽略气缸的摩擦力,气动系统动力学模型则为:
28、
29、式中,pm为气缸m的进气腔的气体压力,am为气缸m的有效作用面积,mm为推杆质量,ηm为气缸m的输出力,为推杆相对气缸的加速度,由于推杆质量相对箭体质量较小,进一步简化:ηm=pmam;
30、由热力学定律可得进气腔压力与高速开关阀占空比信号关系:
31、
32、
33、
34、式中,k为气体绝热系数,r为气体常数,tb为气体温度,v0为气瓶到进气腔管路容积与进气腔死区容积之和,xm为气缸位移,为气缸速度,为气缸内压力的导数,qm为进入进气腔的气体质量流量,μm为高速开关阀占空比信号,cd为流量系数,ae为开关阀阀口等效截面积,pum为上游压力,pdm为下游压力,为气体流量。
35、进一步地,构建基于控制分配的分层控制器中的虚拟层干扰观测器,具体如下:
36、取虚拟控制量vd=lfη,状态空间模型式(4)可变为:
37、
38、其中,ξ为集总扰动;
39、设计非线性干扰观察测器,针对系统(10)可得:
40、
41、式中l=diag(l1,l2,l3)为观测器增益矩阵,且l1,l2,l3>0;为扰动的估计值;为扰动估计值的导数;
42、定义总扰动观测器的观测误差为:
43、
44、由式(10)~式(12)可得干扰观测值的误差导数为:
45、
46、进一步地,构建基于控制分配的分层控制器中的虚拟层控制器,具体如下:
47、由式(10),定义z1=x1d-x1为跟踪误差,其中x1d∈r3×1为目标值指令,且该目标指令二阶连续可微,x1为关于系统相对位移,相对偏航角、相对俯仰角的向量;r3×1表示3行1列的矩阵,选取式(10)中的x2为虚拟控制量,使趋于稳定状态;令x2eq为虚拟控制的期望值,定义虚拟控制误差z2=x2eq-x2;
48、设计虚拟控制的期望值为x2eq:
49、
50、式中,k1=diag(k11,k12,k13),为可调增益矩阵,且k11,k12,k13>0;
51、对虚拟控制误差z2求导,用干扰观测器的估计值代替系统的干扰ξ,并将式(10)、式(14)代入,可得:
52、
53、其中,为虚拟控制误差的导数,k1为增益矩阵;
54、设计并将式(15)代入可得外环虚拟控制层的虚拟控制律:
55、
56、式中,k2=diag(k21,k22,k23),为可调增益矩阵,且k21,k22,k23>0;为跟踪目标的导数;i为单位矩阵。
57、进一步地,构建基于控制分配的分层控制器中的控制分配层,具体如下:
58、考虑一种引入即考虑控制量能耗最低,又考虑控制量变化速率更为合理的动态控制分配方案,对虚拟控制指令vd进行动态分配:
59、
60、式中,w0、w1、w2∈r4×4为权值矩阵,t为控制周期;ηc为待分配的气缸推力;ηca为期望的气缸稳态推力;j为目标函数;s.t.表示约束条件;vd(t)为虚拟控制量;t为仿真时间;
61、假定权值矩阵w1和w2是对称的,并且w4=(w12+w22)1/2是非奇异的,则所述的待分配的气缸推力ηc有以下解:
62、ηc(t)=(i-glf)w4-2w12ηca(t)+(i-glf)w4-2w22ηc(t-t)+gvd(t) (18)
63、其中,g=w4-1(lfw4-1)+,ηca(t)=lft(lflft)-1vd(t),lf为控制效率矩阵,i为单位矩阵。
64、进一步地,基于控制分配的分层控制器中的执行器层控制器,具体如下:
65、利用控制力指令转化为气缸进气腔的目标压力pmd,基于反步控制,设εm=pm-pmd为内环压力跟踪误差,pm为气缸进气腔的实际压力:
66、设李亚普诺夫函数为:
67、
68、由进气腔压力动态方程可得:
69、
70、式中,k为气体绝热系数,r为气体常数,tb为气体温度,v0为气瓶到进气腔管路容积与进气腔死区容积之和,xm为气缸位移,am为气缸有效作用面积,qm为进入进气腔的气体质量流量,为v2(εm)的导数,为压力跟踪误差εm的导数,为气缸m的相对速度,为压力跟踪目标的导数;
71、由李亚普诺夫稳定可知,当时,压力跟踪误差εm收敛到0;
72、设计内环执行器气体质量流量qmd控制律:
73、
74、式中,ηcm为式计算的气缸输出力,am为气缸m活塞面积,γm>0为内环控制器控制增益。
75、进一步地,基于控制分配的分层控制器中的高速开关阀占空比信号设计,具体如下:
76、设计pwm信号占空比:
77、当内环执行器气缸的气体质量流量qmd>0时,充气阀打开,排气阀关闭,其占空比为:
78、
79、式中,为进气高速开关阀的占空比,为排气高速开关阀占空比,aecu为进气高速开关阀的有效节流面积,ps为减压阀后压力,pa为气缸进气腔压力,ts为气体温度,kqa为气体流量方程;
80、当qmd≤0时,充气阀关闭,排气阀打开,其占空比为:
81、
82、式中,aedu为排气高速开关阀的有效节流面积,p0为大气压力,kqb为气体流量方程。
83、进一步地,所述进行火箭级间分离系统同步分离仿真验证,具体如下:
84、步骤4-1、对基于四气缸的火箭分离系统动力学建模,包括分离过程中分离子级的动力学建模和气动系统中高速开关阀、气缸的动力学建模;
85、步骤4-2、对同步分离控制算法进行建模,包括虚拟层控制器、动态控制分配求解、执行器层控制器;
86、步骤4-3、为了对比同步分离控制的效果,分别对比开环与闭环控制的仿真结果,为便于验证控制器效果,仿真过程中,假设减压阀出口的压力不变。
87、本发明与现有技术相比,有以下显著优点:
88、1)本发明在基于气动技术的新型火箭分离系统的基础上,引入闭环控制技术,设计了高速开关阀控制的四气缸级间分离系统,能够在分离过程中实时调整分离力,这是本发明的创新应用之一。
89、2)控制分配方法是一种过驱动系统的控制方法,目前应用在卫星姿态控制领域居多,将该方法与反步控制和干扰观测器结合,应用在多气缸分离系统的同步控制中也是本发明的新颖之处。
90、3)本发明提供的一种多作动器火箭级间分离系统同步分离的控制方法用气动分离系统代替传统的火工分离系统,具有清洁、成本低、可重复使用的优点,引入同步控制后,进一步提高了级间分离的可靠性,增强了系统的鲁棒性。
本文地址:https://www.jishuxx.com/zhuanli/20240802/236280.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表