低冲突无人机网络分布式的自主资源规划方法
- 国知局
- 2024-08-02 12:39:00
本发明属于通信,具体涉及一种自主资源规划方法,可用于无人机网络中提升业务传输成功率。
背景技术:
1、无人机uav是一种以数据驱动的空中移动智能体,能够执行各种任务。其具有移动速度快、定制化灵活、维护费用低、扩展性强、不易侦查的特点,可广泛用于单无人机场景与无人机自组网场景。单无人机通常用于完成简单任务,但随着无人机应用场景愈发复杂,大数据时代信息数据量的爆炸增长及信息化社会发展的需求对网络通信性能与业务传输质量提出了更高的要求,传统单无人机部署模式对数据处理的能力受限,已无法支持多业务并发低时延高可靠传输。为了提高网络对于不同业务的适应能力,满足高质量的业务处理需求,由若干架无人机构成的无人机自组网应运而生,各无人机之间可以通过协同作业的方式满足各种复杂场景的需求。多架无人机协同工作,不仅提高了网络的扩展性与鲁棒性,还能更好地适应不同业务需求。无人机自组网在各种民用领域均起到关键作用,尤其在物流运输、农林植保、巡检巡查等方面有着广泛应用。潜在无人机应用场景还有许多,例如在森林防火、国土测绘、环境保护、应急救援、医疗救助、城市消防等公共服务领域的应用,无人机自组织网络的优势在这一发展过程中愈发凸显。特别值得关注的是,在物流方面,无人机可以忽略城市地面的复杂情况,无需“修路建桥”来搭建运输网络,仅需利用低空场景,就能实现物流领域的全新突破,为行业带来更大的便利和效益。
2、申请号为cn202210613320.9的专利文献公开了一种《基于动态tdma资源分配自组网的资源预留实现方法及系统》,其使用dijkstra算法为节点发送数据包预留最佳路由,并参照路由计算结果,为每个基于时分多址tdma体制的节点分配时隙的资源分配方法。但该类方法并不适用于分布式的无人机网络场景。首先,这种方法未考虑自组网分布式业务到达需求,若网络中多个节点均有业务传输需求,按照dijkstra算法一般选择最快转发的时隙,这样选择的路径耗费时间最短,但是易造成时隙冲突;其次,该方法将问题分解为两个子问题求解,割裂了路由与链路资源的耦合性,使得求解结果不精确。
3、申请号为cn202211334082.4的专利文献公开了《一种基于候鸟群特性的无人机自组网的资源分配方法》,其将时隙划分为感知阶段与数据传输阶段。在感知阶段,通过设定最优感知范围,获取网络感知信息;在数据传输阶段,基于感知信息为源节点到汇节点分配最短时延传输路径,以避免感知信息与传输数据之间的冲突。但该方法由于未考虑分布式网络的在数据传输过程中的低冲突需求,即在数据传输阶段,基于最短时延方法为节点分配资源的过程中,各节点产生的业务可能会经过同一节点的相同时隙,从而导致业务之间的冲突。在冲突发生后,节点会重传传输失败的业务,使得业务传输时延增长。
技术实现思路
1、本发明目的在于针对上述现有技术的不足,提出一种低冲突无人机网络分布式的自主资源规划方法,以降低业务数据分布式传输过程中的节点的冲突概率,减小网络中业务的平均传输时延,提升业务传输成功率。
2、为实现上述目的,本发明的技术方案如下:
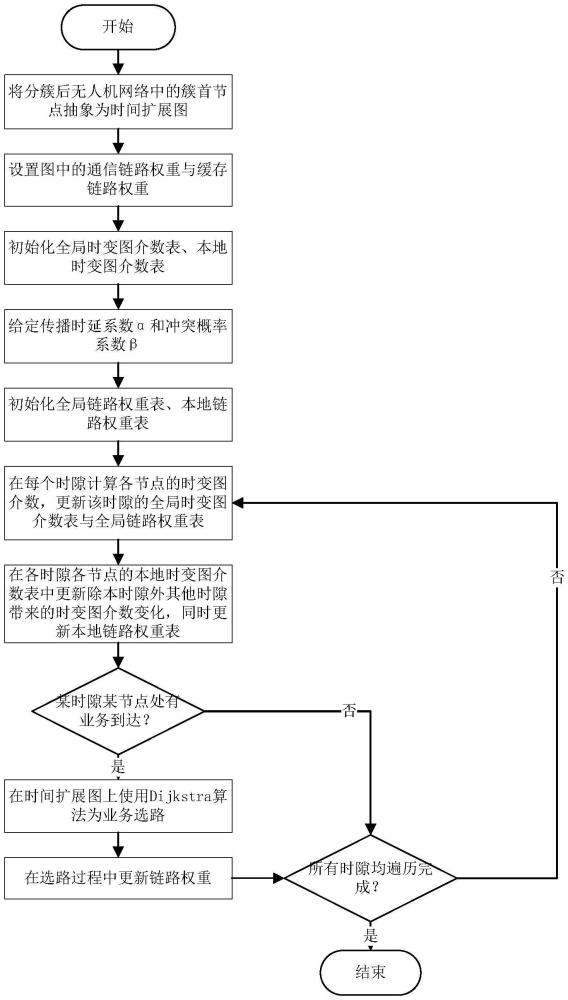
3、(1)对无人机网络进行分簇,并将分簇后无人机网络中的所有簇首节点抽象为一个时间扩展图,计算该图中链路i在时隙t的传播时延和冲突概率
4、(2)根据传播时延和冲突概率计算时间扩展图中的通信链路权重根据时间扩展图中的时隙宽度t计算该图的存储链路权重τ:
5、
6、τ=αt
7、其中,α为传播时延系数,β为冲突概率系数;
8、(3)初始时刻,设置全局时变图介数表与本地时变图介数表中各时隙中的各节点的时变图介数均为0,并给定α与β,得到时间扩展图中各通信链路权重,将其存储至网络中的全局链路权重表和各节点处的本地链路权重表中;
9、(4)在时间扩展图上基于dijkstra算法对以节点st为源节点的业务选择到达汇节点dt′的最小代价路径,并在选路过程中根据节点的时变图介数更新链路权重:
10、(4a)使用全局链路权重表中的链路权重初始化时间扩展图,在每个时隙中使用dijkstra算法计算图中各节点的时变图介数保存到网络中的全局时变图介数表中,并根据更新节点冲突概率,将其转化为链路权重,更新网络中的全局链路权重表;
11、(4b)各时隙的每个节点在其自身的本地时变图介数表中更新除本节点外的节点带来的时变图介数g′变化,并根据g′更新节点冲突概率,将其转化为链路权重,更新各节点的本地链路权重表;
12、(4c)判断各时隙中各节点处是否有业务到达:
13、若有业务到达,则使用本地链路权重表中的链路权重更新时间扩展图,基于更新后的时间扩展图,使用dijkstra算法为业务选择最优路径,并在本地链路权重表中更新路径占用的发送节点和接收节点连接链路的权重为∞,继续执行步骤(4d);
14、若无业务到达,则直接执行步骤(4d);
15、(4d)判断当前时隙是否为最后一个时隙:
16、若不是最后一个时隙,返回步骤(4a),直至所有时隙均被遍历完成;
17、若是最后一个时隙,得到各时隙中为各节点业务分配的资源结果。
18、本发明与现有技术相比,有如下优点:
19、其一,本发明通过定量刻画越区导致的业务在节点处的冲突概率,并将其表征到链路权重上,使得为业务选择路径时,能够提前规避业务资源之间的冲突,与现有技术相比,可减少因业务传输失败导致的业务重传次数,从而减小网络中业务的平均传输时延。
20、其二,本发明中时间扩展图的链路权重随着网络状态自主变化,使得业务分布式决策资源时,能够较为准确地选择冲突概率较低的路径与时隙,有助于降低业务数据分布式传输过程带来的冲突问题,提升业务传输成功率。
技术特征:1.一种低冲突无人机网络分布式的自主资源规划方法,包括:
2.根据权利要求1所述的方法,其中步骤(1)中计算时间扩展图中链路i在时隙t的传播时延实现如下:
3.根据权利要求1所述的方法,其中步骤(1)中计算时间扩展图中链路i在时隙t的冲突概率实现如下:
4.根据权利要求1所述的方法,其中步骤(4a)中在每个时隙中使用dijkstra算法计算图中各节点的时变图介数实现如下:
5.根据权利要求1所述的方法,其中步骤(4b)中各时隙每个节点在其自身的本地时变图介数表中更新除本节点外的节点带来的时变图介数g′变化,实现如下:
6.根据权利要求1所述的方法,其中步骤(4c)中使用dijkstra算法为业务选择最优路径,实现如下:
7.根据权利要求3所述的方法,其中步骤(1a)中根据节点的运动速度v与运动方向θ,计算节点向左或右方向越区的概率p1,公式如下:
8.根据权利要求3所述的方法,其中步骤(1a)中根据节点的运动速度v与运动方向θ,计算节点向上或下方向越区的概率p2,公式如下:
9.根据权利要求3所述的方法,其中步骤(1a)中根据节点的运动速度v与运动方向θ,计算节点向左上或左下或右上或右下方向越区的概率p3,公式如下:
技术总结本发明公开了一种低冲突无人机网络分布式的自主资源规划方法,主要解决各节点分布式决策资源时分配资源易冲突的问题。其实现方案为:对无人机网络进行分簇;将分簇后的无人机网络抽象为一个初始时间扩展图;计算初始时间扩展图中链路在时隙的传播时延及图中节点的时变图介数;计算初始时间扩展图中链路在时隙的冲突概率;计算初始时间扩展图中链路权重得到复合权重的扩展图;对复合权重的时间扩展图初始化得到最终时间扩展图;在最终扩展图上为业务选路,并在该过程中更新时变图介数与链路权重;得到业务的资源分配结果。本发明降低了节点分布式路由决策过程中的业务冲突概率,可用于无人机网络、移动自组织网络、车载自组织网络。技术研发人员:李红艳,齐凡,王鹏,史可懿,马英红,张建国,郭宗焕受保护的技术使用者:西安电子科技大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/237123.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。