透镜阴影校正电路、透镜阴影校正方法以及图像处理系统与流程
- 国知局
- 2024-08-02 12:41:49
发明构思涉及一种图像处理系统,并且更具体地,涉及一种使用椭圆增益值(elliptical gain value)的透镜阴影校正电路、透镜阴影校正方法以及图像处理系统。
背景技术:
1、成像系统包括检测和传送信息以形成图像的图像传感器。图像传感器的示例包括电荷耦合器件(ccd)传感器和有源像素传感器(诸如,互补金属氧化物半导体(cmos))。图像传感器可包括一个或多个透镜以及一个或多个像素。
2、透镜阴影或渐晕(vignetting)表示发生在成像系统中的光学现象,其中,由于透镜的光学特性,入射在安置在图像传感器的中心部分中的像素上的光的量与入射在安置在图像传感器的外围部分中的像素上的光的量不同。因此,由于透镜阴影或渐晕(即,由于在朝向图像外围的方向上的亮度降低),图像强度在朝向图像外围的方向上降低。因此,需要透镜阴影校正或渐晕校正方法来提高图像质量。
技术实现思路
1、发明构思的至少一个实施例提供了一种透镜阴影校正/补偿方法和/或一种透镜阴影校正/补偿电路、以及一种透镜阴影校正/补偿方法,所述透镜阴影校正/补偿方法用于防止图像在透镜阴影校正/补偿期间突出(stand out),所述透镜阴影校正/补偿电路被配置为执行通过考虑图像的全部像素来调整图像的每个像素的颜色的方法。
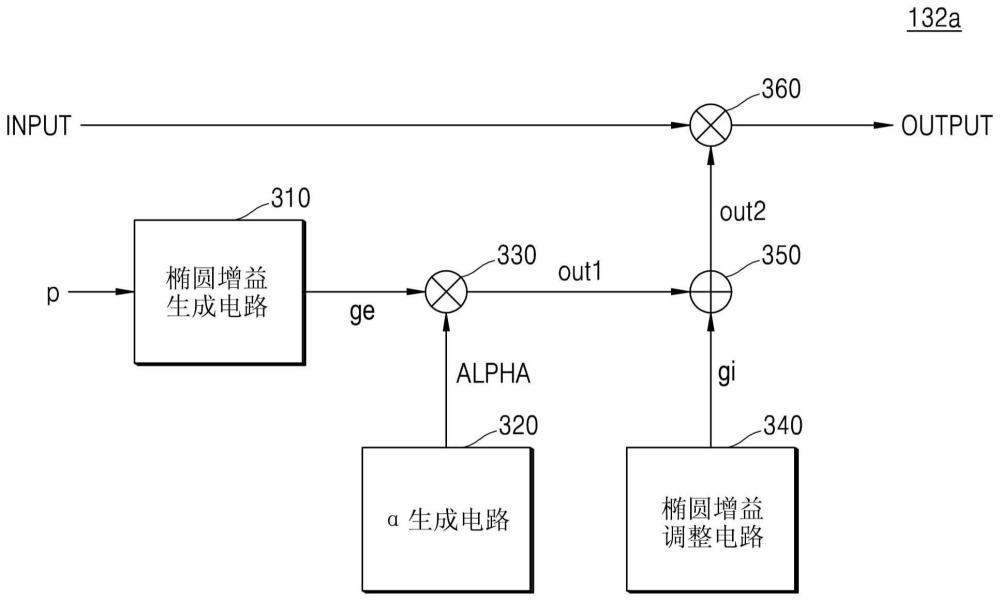
2、根据发明构思的一个方面,提供了一种用于校正透镜阴影的透镜阴影校正电路。所述透镜阴影校正电路包括椭圆增益生成电路,被配置为:提取像素的位置并使用椭圆增益参数和提取的位置来生成椭圆增益值,以及第一乘法器,被配置为:通过将椭圆增益值乘以像素的权重来输出第一输出值。透镜阴影校正电路基于第一输出值和增益增量值来校正透镜阴影。
3、根据发明构思的一个方面,提供了一种透镜阴影校正方法。所述透镜阴影校正方法包括提取像素的位置,使用提取的像素的位置和椭圆增益参数生成椭圆增益值,通过将椭圆增益值乘以像素的权重来生成第一输出值,并且基于第一输出值和增益增量值来校正透镜阴影。
4、根据发明构思的另一方面,提供了一种图像处理系统,所述图像处理系统包括图像传感器和图像信号处理器。图像信号处理器包括:存储椭圆增益参数的寄存器和透镜阴影校正电路。透镜阴影校正电路包括:椭圆增益生成电路,被配置为:提取像素的位置并使用椭圆增益参数来生成椭圆增益值,以及第一乘法器,被配置为:通过将椭圆增益值乘以像素的权重来输出第一输出值。透镜阴影电路使用第一输出值和增益增量值来校正透镜阴影。
技术特征:1.一种用于校正透镜阴影的透镜阴影校正电路,所述透镜阴影校正电路包括:
2.根据权利要求1所述的透镜阴影校正电路,还包括:
3.根据权利要求1所述的透镜阴影校正电路,其中,椭圆增益生成电路还被配置为:根据像素的位置来生成不同的椭圆增益值。
4.根据权利要求1所述的透镜阴影校正电路,其中,像素被安置在二维平面上,并且像素的位置包括第一方向上的第一位置值和与第一方向正交的第二方向上的第二位置值。
5.根据权利要求4所述的透镜阴影校正电路,其中,椭圆增益生成电路被配置为:使用n次方程、椭圆增益参数以及像素的第一位置值和第二位置值来生成椭圆增益值。
6.根据权利要求5所述的透镜阴影校正电路,其中,椭圆增益参数包括第一参数至第四参数,
7.根据权利要求1至6中的任一项所述的透镜阴影校正电路,还包括:寄存器,寄存器存储椭圆增益参数。
8.根据权利要求6所述的透镜阴影校正电路,其中,第一参数至第四参数使像素的第一位置值、第二位置值以及误差最小化。
9.一种透镜阴影校正方法,包括:
10.根据权利要求9所述的透镜阴影校正方法,还包括:
11.根据权利要求9所述的透镜阴影校正方法,其中,生成椭圆增益值的步骤包括:根据像素的位置来生成不同的椭圆增益值。
12.根据权利要求9所述的透镜阴影校正方法,其中,在提取像素的位置时,像素被安置在二维平面上,并且像素的位置包括第一方向上的第一位置值和与第一方向正交的第二方向上的第二位置值。
13.根据权利要求12所述的透镜阴影校正方法,其中,生成椭圆增益值的步骤包括:使用n次方程、椭圆增益参数和像素的第一位置值和第二位置值来生成椭圆增益值。
14.根据权利要求13所述的透镜阴影校正方法,其中,在使用椭圆增益参数生成椭圆增益值时,椭圆增益参数包括第一参数至第四参数,第一参数和第二参数是所述n次方程的参数,第三参数是第一方向上的椭圆参数,并且第四参数是第二方向上的椭圆参数。
15.一种图像处理系统,包括图像传感器和图像信号处理器,
16.根据权利要求15所述的图像处理系统,其中,透镜阴影校正电路还包括:
17.根据权利要求15所述的图像处理系统,其中,椭圆增益生成电路还被配置为:根据像素的位置来生成不同的椭圆增益值。
18.根据权利要求15所述的图像处理系统,其中,像素被安置在二维平面上,并且像素的位置包括第一方向上的第一位置值和与第一方向正交的第二方向上的第二位置值。
19.根据权利要求18所述的图像处理系统,其中,椭圆增益生成电路被配置为:使用n次方程、椭圆增益参数以及像素的第一位置值和第二位置值来生成椭圆增益值。
20.根据权利要求19所述的图像处理系统,其中,椭圆增益参数包括第一参数至第四参数,
技术总结公开了一种透镜阴影校正电路、透镜阴影校正方法以及图像处理系统。所述透镜阴影校正电路包括:椭圆增益生成电路,被配置为提取像素的位置,并使用椭圆增益参数和提取的位置生成椭圆增益值;以及乘法器,被配置为通过将椭圆增益值乘以像素的权重来输出输出值。透镜阴影校正电路基于第一输出值和增益增量值来校正透镜阴影。技术研发人员:崔畅训,崔承源,金铉哲,崔钟声受保护的技术使用者:三星电子株式会社技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/237371.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
手持式电子设备的制作方法
下一篇
返回列表