一种基于图神经网络的无人机集群拓扑优化方法及系统与流程
- 国知局
- 2024-08-02 12:45:56
本发明属于无人机,尤其涉及一种基于图神经网络的无人机集群拓扑优化方法及系统。
背景技术:
1、无人机集群通信拓扑是指多架无人机之间建立的通信网络结构。在无人机集群中,各个无人机之间需要相互通信进行协作、协调和信息交换,以完成特定任务或目标。通信拓扑可以描述无人机之间的联系方式、传输路径、信息交换方式等,有助于实现集群中无人机之间的协同工作和智能决策。通信拓扑的设计和优化可以提高无人机集群的工作效率和性能。
2、无人机集群的通信拓扑在高速飞行中变化迅速,传统的路径寻优算法(遗传算法,蚁群算法,暴力搜索算法等)需要对路径进行遍历,使得收敛速度慢,响应速度慢,无法实时优化拓扑结构。
3、例如,专利申请cn110661566a公开了一种采用深度图嵌入的无人机集群组网方法与系统,该方法包括:对历史网络数据进行量化处理得到网络快照数据,对所述网络快照数据进行数据表示,并根据无人机集群特性计算得到有向含权图对应的权值;采用编码解码模型对所述历史网络数据进行图嵌入,提取所述历史网络数据中各节点的拓扑结构信息,并通过改进的临近相似度函数使所述编码解码模型对所述有向含权图进行适应;根据所述拓扑结构信息对无人机集群网络进行个体局部分层组网。
4、再例如,专利申请cn114326824a还公开了一种基于仿生算法异构高密度混合无人机群拓扑控制方法。该方法针对不同类型的异构无人机集群,设计了全新的通信拓扑构建,首先针对异构高密度混合无人机群应用场景,采用以大型/中型无人机作为关键节点,高密度小型无人机在关键节点周围采用分层次的不同耦合模式,进行编队队形构建;然后构建异构无人机群拓扑结构;再基于仿生算法进行队形拓扑实时优化调整;最后采用避障队形拓扑实时拆分与重构技术完善避障控制方法。
5、中国专利申请cn117784823a还公开了一种面向大规模无人机集群的网络拓扑控制方法和系统,包括:初始化无人机拓扑网络,获取无人机网络节点的飞行信息;利用飞行信息估测相邻节点的动态拓扑路径,并根据估测结果自适应调整通信网络开销;根据飞行信息计算用于维持拓扑结构的重要节点生存寿命,并根据生存寿命调整重要节点配置,并根据调整结果重新构建拓扑网络;维护重新构建的拓扑网络。
6、但是,上述避障方式均存在响应速度较慢等缺陷,尤其是在大型无人机集群遇障时,难以快速地实现无人机集群的避障。
技术实现思路
1、本发明的目的在于提供一种基于图神经网络的无人机集群拓扑优化方法及系统,能够实时的对无人机集群拓扑结构进行优化。
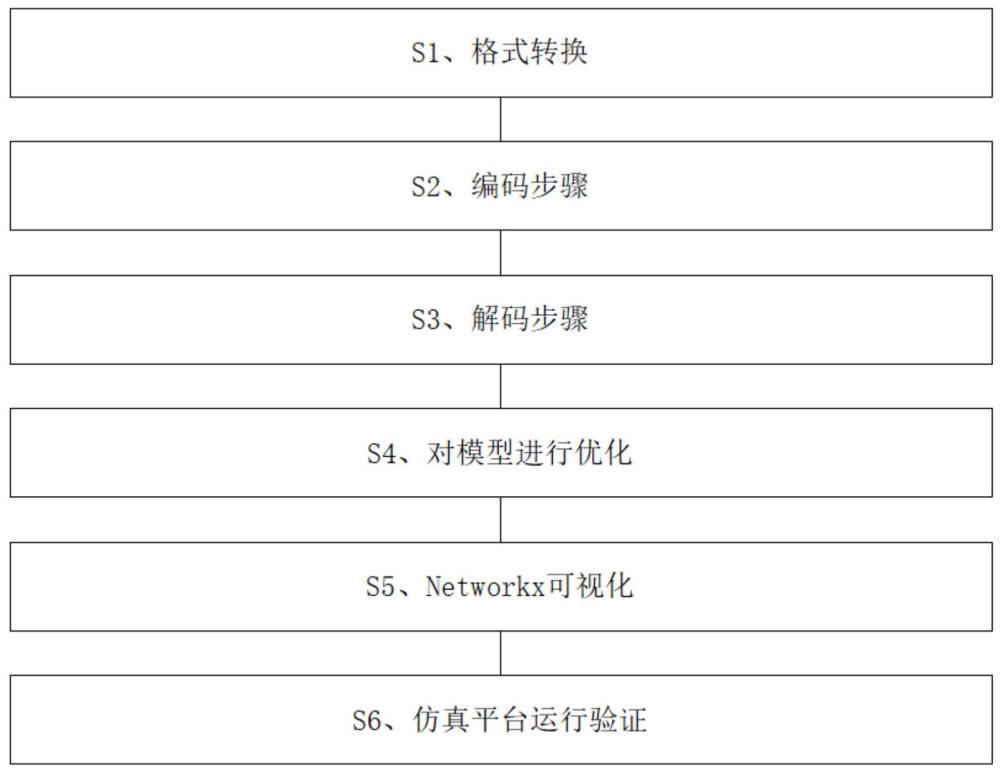
2、为了解决上述所提到的技术问题,本发明具体采用以下技术方案:一种基于图神经网络的无人机集群拓扑优化方法,包括:
3、编码步骤,计算待优化的无人机集群拓扑结构的邻接矩阵以及所述无人机集群的节点特征矩阵中每个节点的均值和方差,并通过节点均值和方差获取正态分布变量;对正态分布变量进行随机采样获得采样变量矩阵;将采样变量矩阵还原为真实变量矩阵;
4、解码步骤,利用真实变量矩阵获取重构邻接矩阵;并对重构邻接矩阵中的元素进行整数化获取优化后的无人机集群拓扑结构邻接矩阵。
5、作为一种改进,通过pytorch库函数对待优化无人机集群通信拓扑结构图进行格式转换获得无人机集群拓扑结构的邻接矩阵。
6、作为一种改进,所述无人机集群的节点特征矩阵中包括无人机特征矩阵以及集群特征矩阵;所述无人机特征矩阵的属性包括剩余能耗、传感器输入、位置信息、信道利用率;所述集群特征矩阵的属性包括当前拓扑连接、任务要求、有无故障节点。
7、作为一种改进,
8、利用公式:
9、;
10、计算无人机节点剩余能耗;其中,为序号为的节点的剩余能耗,e0为初始能耗,为无人机节点发送位比特数据包的能耗;为无人机节点接收位比特数据的能耗;分别为发送和接收的指示变量,无人机发送数据时,接收数据时;
11、利用公式:
12、;
13、计算无人机转发和接收时的能量消耗;其中,为无人机节点发送位比特数据包的能耗;为数据包的比特数量;为无人机节点接收位比特数据的能耗;为电路运行的能耗;为自由空间传播损耗系数;为多径衰落传播损耗系数;为无人机与无人机之间的距离;为损耗系数选择变量:
14、;
15、其中,为距离阈值,;
16、所述传感器输入包括自身定位、温度热成像、与障碍物间距离与反射率、电磁环境参数。
17、作为一种改进,利用公式:
18、;
19、计算节点的均值;其中,μ为节点的均值,f为邻接矩阵,a为节点特征矩阵,gcnμ为计算均值的图卷积层;
20、利用公式:
21、;
22、计算节点的方差;其中,logσ为方差的对数,f为邻接矩阵,a为节点特征矩阵,gcnσ为计算方差的图卷积层;
23、利用公式:
24、zi=n(μi,σi2);
25、计算正态分布变量;其中,zi为序号为i的节点的正态分布变量,μi为序号为i的节点的均值,σi为序号为i的节点的方差,n为正态分布计算符号。
26、作为一种改进,利用公式:
27、;
28、计算真实变量矩阵;其中,z为真实变量矩阵,为采样变量矩阵,μ为均值,为方差。
29、作为一种改进,利用公式:
30、a*=sigmoid(zzt);
31、计算重构邻接矩阵;其中,a*为重构邻接矩阵,z为真实变量矩阵,zt为真实变量矩阵的转置,sigmoid为激活函数。
32、作为一种改进,利用损失函数:
33、<mstyle displaystyle="true" mathcolor="#000000"><mi>loss</mi><mi>=</mi><mi>diff</mi><mi>(</mi><mi>a</mi><msup><msub><mrow /><mi>t</mi></msub></msup><mi>,</mi><mi>a</mi><msup><msub><mrow /><mrow><mi>t</mi><mo>+</mo><mn>1</mn></mrow></msub></msup><mi>)</mi><mi>=</mi><msub><mi>e</mi><mrow><msup><mi>a</mi><mi>t</mi></msup><mi>~{</mi><mn>0</mn><mi>,</mi><mn>1</mn><mi>}</mi></mrow></msub><mi>[</mi><mi>−</mi><mi>log</mi><mi>p</mi><mi>(</mi><msup><mi>a</mi><mrow><mi>t</mi><mo>+</mo><mn>1</mn></mrow></msup><mi>|</mi><mi>z</mi><mi>)]</mi></mstyle>;
34、进行优化;其中,loss为损失参数,diff为区别对比;at为输入的邻接矩阵,at+1为输出的邻接矩阵,z为真实变量矩阵,p为真实分布概率,e为数学期望。
35、作为一种改进,利用networkx工具对待优化的无人机集群拓扑结构和优化后的无人机集群拓扑结构进行可视化,或/和,对编码步骤中的低维向量进行可视化。
36、作为一种改进,搭建仿真平台对优化后的无人机集群拓扑结构进行验证。
37、本发明还提供一种基于图神经网络的无人机集群拓扑优化系统,包括:
38、编码器,用于计算待优化的无人机集群拓扑结构的邻接矩阵以及所述无人机集群的节点特征矩阵中每个节点的均值和方差,并通过节点均值和方差获取正态分布变量;对正态分布变量进行随机采样获得采样变量矩阵;将采样变量矩阵还原为真实变量矩阵;
39、解码器,用于利用真实变量矩阵获取重构邻接矩阵;并对重构邻接矩阵中的元素进行整数化获取优化后的无人机集群拓扑结构邻接矩阵。
40、本发明的有益之处在于:
41、为了提升大型无人机集群在遇障时的避障速度,本发明一方面引入了图卷积层对无人机拓扑信息进行深度学习,另一方面结合图卷积层的学习特性、大型无人机集群的运动特性针对性地选取了一组特定输入数据(即无人机的剩余能耗、传感器输入、位置信息、信道利用率等无人机特征,以及当前拓扑连接、任务要求、有无故障节点等集群特征),并围绕这一组特定输入数据完成矩阵结构的快速优化。
42、换言之,本发明所选用的特定输入数据组合能够与图卷积层的学习特性、大型无人机集群的运动特性有效协同,从而在遇障时,快速为无人机集群构建有效地避障队形,以提升无人机集群在遇障时的响应速度,提升无人机集群的运行安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240802/237709.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表