基于钢珠模体的旋转式探测器模块z方向调位方法及系统与流程
- 国知局
- 2024-08-05 11:40:16
本发明涉及ct系统模块校准,具体而言,涉及一种基于钢珠模体的旋转式探测器模块z方向调位方法及系统。
背景技术:
1、目前在ct系统中,为确保得到更为清晰的图像,其探测器模块在安装时,要求所有探测器模块在z方向的位置尽可能保持一致,即,每个探测器模块的z方向位置差异要求很小。因此,在探测器模块安装完成后,通常需对模块在z方向的位置计算,之后根据计算结果调整z方向位置,以便达到生产要求。
2、现有技术中,针对模块位置的计算普遍采用静态曝光形式,即通过准直叶片使用狭缝成像于探测器模块,而后根据采集到的模块数据进行调整。但是,由于此种方法是在静态下进行曝光,而ct系统实际使用时是通过转位机构进行旋转曝光。也就是说,受到转位机构旋转曝光的动态影响,通过静态曝光计算调整的结果可能与旋转时不一致,由此导致模块位置的静态调整效果不佳。
技术实现思路
1、为此,本发明提供了一种基于钢珠模体的旋转式探测器模块z方向调位方法及系统,以解决现有技术中针对探测器模块位置采用静态曝光计算调位时,与实际转位机构旋转曝光的计算调整结果存在差异,调整效果不佳的问题。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种基于钢珠模体的旋转式探测器模块z方向调位方法,包括如下步骤:
4、基于扫描基座的特定扫描位置将钢珠模体摆放到位,启动位于扫描基座的转位机构旋转扫描采集得到钢珠组数据;
5、退出钢珠模体,并使用与扫描钢珠模体相同的扫描条件扫描得到空气组数据;
6、针对钢珠组数据和空气组数据做预处理,并比对得到钢珠衰减数据;
7、选取钢珠投影于探测器模块x方向中心的view视图数据,计算得到钢珠对应于探测器模块的所处位置,并最终计算得到若干组探测器模块分别对应的钢珠位置;
8、根据若干组探测器模块的索引值及其分别对应的钢珠位置做多项式拟合运算,并将若干组探测器模块的实际位置减去其经拟合后的位置,即得到若干组探测器模块的位置差异;
9、根据若干组探测器模块的位置差异值,分别调整每组探测器模块对应于z方向的位置,直至各组差异值均处于要求的阈值范围内。
10、在上述技术方案的基础上,对本发明做如下进一步说明:
11、作为本发明的进一步方案,所述基于扫描基座的特定扫描位置将钢珠模体摆放到位,启动位于扫描基座的转位机构旋转扫描采集得到钢珠组数据,具体包括:
12、将钢珠模体悬空挂置于一定位机构,并基于该定位机构使钢珠模体装配至扫描基座的曝光扫描预定位置保持定位静止,之后控制位于扫描基座的转位机构依照设定好的驱动参数对于保持定位静止的钢珠模体进行旋转曝光扫描,由此采集得到钢珠模体的旋转曝光扫描数据,即钢珠组数据。
13、作为本发明的进一步方案,所述退出钢珠模体,并使用与扫描钢珠模体相同的扫描条件扫描得到空气组数据,具体包括:
14、退出钢珠模体,继续控制位于扫描基座的转位机构依照与上述过程中曝光钢珠模体设定好的驱动参数对于空气做曝光旋转断层扫描,得到空气组数据。
15、作为本发明的进一步方案,所述选取钢珠投影于探测器模块x方向中心的view视图数据,计算得到钢珠对应于探测器模块的所处位置,并最终计算得到若干组探测器模块分别对应的钢珠位置,具体包括:
16、选取钢珠衰减数据对应投影于探测器模块x方向中心的vi ew视图数据,而后经计算得到在所述vi ew视图数据中钢珠所处的z方向位置,钢珠所处的z方向位置即为钢珠衰减数据曲线在探测器模块z方向分布的质心,其转换公式如下:
17、
18、其中,p表示钢珠所处于探测器模块z方向的位置,d表示钢珠衰减数据值,s为探测器模块对应的slice索引值;
19、最终计算得到若干组探测器模块分别于z方向对应的钢珠位置。
20、作为本发明的进一步方案,所述根据若干组探测器模块的索引值及其分别对应的钢珠位置做多项式拟合运算,并将若干组探测器模块的实际位置减去其经拟合后的位置,即得到若干组探测器模块的位置差异,具体包括:
21、在计算得到每组探测器模块分别于z方向对应的钢珠位置后,根据若干组探测器模块的索引值及其分别对应的钢珠位置做多项式拟合运算,得到若干组探测器模块拟合光滑的位置曲线,并进一步基于拟合光滑的位置曲线与若干组探测器模块实际位置之间做差值运算,即得到若干组探测器模块的位置差异。
22、作为本发明的进一步方案,所述根据若干组探测器模块的位置差异值,分别调整每组探测器模块对应于z方向的位置,直至各组差异值均处于要求的阈值范围内,具体包括:
23、根据若干组探测器模块的位置差异值,对于差异值超出阈值范围的探测器模块沿z方向调节位置,直至若干组探测器模块的位置差异值均处于阈值范围内,即完成若干组探测器模块于z方向的位置调节。
24、一种执行所述的基于钢珠模体的旋转式探测器模块z方向调位方法的系统,所述系统包括:
25、扫描基座、转位机构、射线球管、射线检测器和钢珠模体;
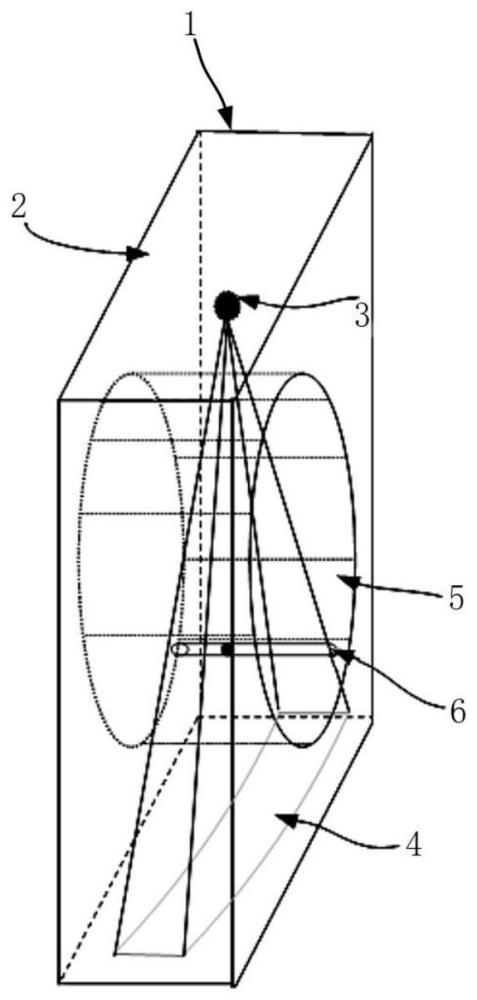
26、所述扫描基座可驱动旋转式装配设置有一所述转位机构,所述转位机构的一侧部固定装配设置有能够发射x射线的所述射线球管,且所述转位机构对应于所述射线球管的对向侧部固定装配设置有能够接收x射线的所述射线检测器,在所述扫描基座控制所述转位机构旋转时,通过所述转位机构的旋转作用带动所述射线球管与所述射线检测器同步旋转曝光扫描;
27、所述钢珠模体定位设置于所述扫描基座,且所述钢珠模体对应位于所述射线球管与所述射线检测器之间的射线传输路径,在所述射线球管基于所述转位机构旋转时同步连续发出x射线,x射线经所述钢珠模体之后形成衰减射线发射至所述射线检测器,所述射线检测器以特定频率连续接收穿过所述钢珠模体形成的衰减射线,并以特定格式存储连续接收的衰减射线数据。
28、作为本发明的进一步方案,所述钢珠模体悬空挂置于一定位机构,所述定位机构设置为扫描床机构,所述钢珠模体基于所述扫描床机构对应位于所述射线球管与所述射线检测器之间的射线传输路径。
29、作为本发明的进一步方案,所述钢珠模体设置为定向延伸的模体基础及活动设置于所述模体基础的钢珠,所述模体基础整体沿z向布置,所述z向即为所述转位机构的旋转轴向。
30、作为本发明的进一步方案,还包括:探测器模块;
31、所述探测器模块设置有若干组,若干组所述探测器模块分别沿x向排布位于所述转位机构对应所述射线检测器的位置;
32、所述x向即为同步垂直于所述z向与所述转位机构对应圆形径向的方向。
33、本发明具有如下有益效果:
34、该系统及方法使用钢珠作为模体,并利用转位机构进行旋转曝光扫描钢珠模体采集数据,以此计算得到探测器模块的z方向位置,并针对性做出探测器模块的位置调整,由此实现与实际使用场景更为一致,达到更高的图像质量。
技术特征:1.一种基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,
3.根据权利要求2所述的基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,
4.根据权利要求3所述的基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,
5.根据权利要求4所述的基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,
6.根据权利要求5所述的基于钢珠模体的旋转式探测器模块z方向调位方法,其特征在于,
7.一种执行如权利要求6所述的基于钢珠模体的旋转式探测器模块z方向调位方法的系统,其特征在于,所述系统包括:
8.根据权利要求7所述的执行基于钢珠模体的旋转式探测器模块z方向调位方法的系统,其特征在于,
9.根据权利要求8所述的执行基于钢珠模体的旋转式探测器模块z方向调位方法的系统,其特征在于,
10.根据权利要求9所述的执行基于钢珠模体的旋转式探测器模块z方向调位方法的系统,其特征在于,还包括:探测器模块;
技术总结本发明公开了一种基于钢珠模体的旋转式探测器模块z方向调位方法及系统,包括:扫描基座、转位机构、射线球管、射线检测器和钢珠模体;扫描基座可驱动旋转式装配设置有一转位机构,转位机构的一侧部固定装配设置有能够发射X射线的射线球管,且转位机构对应于射线球管的对向侧部固定装配设置有能够接收X射线的射线检测器;钢珠模体定位设置于扫描基座,且钢珠模体对应位于射线球管与射线检测器之间的射线传输路径。解决了现有技术中针对探测器模块位置采用静态曝光计算调位时,与实际转位机构旋转曝光的计算调整结果存在差异,调整效果不佳的技术问题。技术研发人员:柴佳彬,马明文受保护的技术使用者:赛诺威盛科技(北京)股份有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/258725.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。