基于自适应MNAD的谐波减速器早期故障诊断方法、系统、装置及存储介质
- 国知局
- 2024-08-05 11:40:14
本技术涉及谐波减速器,特别是涉及一种基于自适应mnad的谐波减速器早期故障诊断方法、系统、装置及存储介质。
背景技术:
1、谐波减速器是一种减速装置,由三个基本构件所组成:带有内齿圈的刚性齿轮(刚轮)、带有外齿圈的柔性齿轮(柔轮)以及波发生器。工作时,固定钢轮,由电机带动波发生器转动,柔轮作为从动轮,输出转动,带动负载运动。波发生器是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿预设方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器相反方向的缓慢旋转。
2、谐波减速器是广泛应用于工业机器人中的关键部件,其健康状况直接影响着整个工业机器人的运行精度和可靠性。目前,工业机器人的谐波减速器早期故障诊断过程中由于环境噪声导致故障特征信息弱,且最小噪声幅度反褶积算法模型mnad中的关键参数组合(滤波器长度l和周期噪声振幅比ρ)的数值会对滤波结果造成一定影响,而现有技术中,mnad中的关键参数组合中滤波器长度l和周期噪声振幅比ρ的值依赖于人工经验选择,选择得到的关键参数组合中的滤波器长度l和周期噪声振幅比ρ的值往往不是最优的,因此对谐波减速器的早期故障诊断特征提取性能不佳,导致故障诊断结果的准确率低。
3、因此,如何提高谐波减速器的早期故障诊断的诊断结果准确率,是目前亟待解决的问题。
技术实现思路
1、为解决上述技术问题,本技术提供基于自适应mnad的谐波减速器早期故障诊断方法、系统、装置及存储介质,以提高谐波减速器的早期故障诊断的诊断结果准确率。本技术还提供一种基于自适应mnad的谐波减速器早期故障诊断系统、装置及存储介质,具有相同的技术效果。
2、本技术的第一个目的为提供基于自适应mnad的谐波减速器早期故障诊断方法。
3、本技术的上述申请目的一是通过以下技术方案得以实现的:
4、一种基于自适应mnad的谐波减速器早期故障诊断方法,所述方法包括如下步骤:
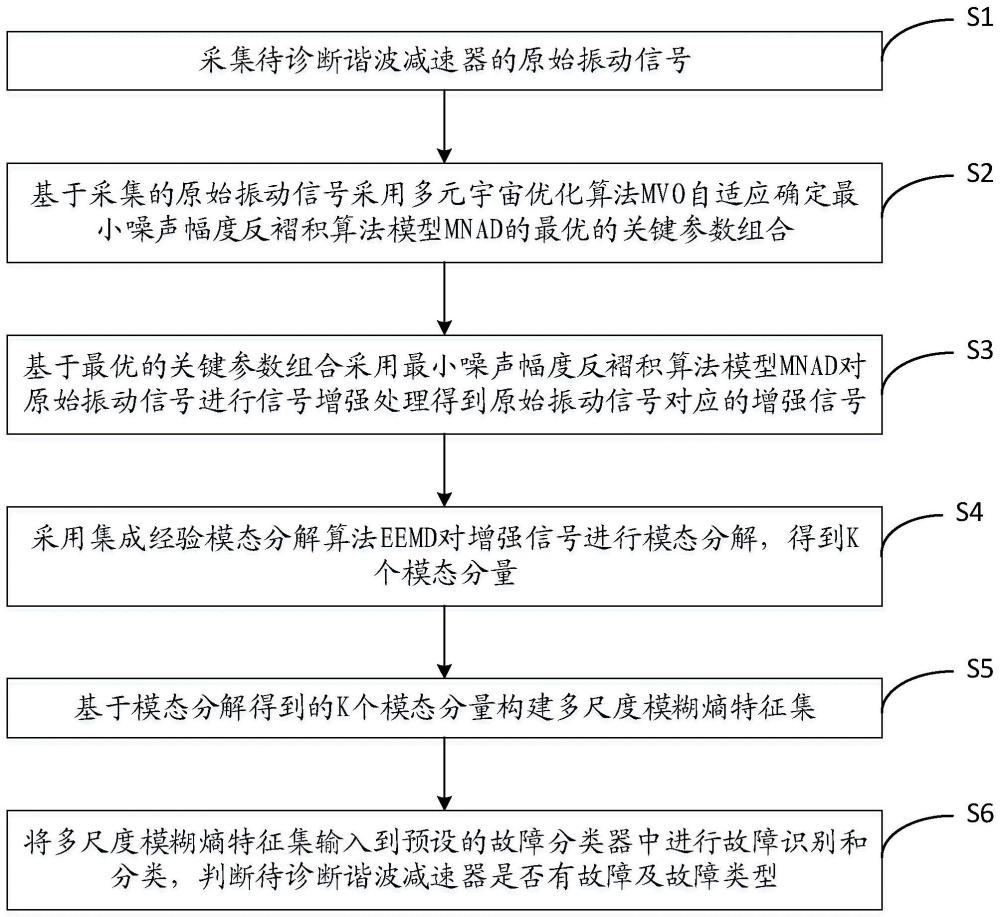
5、s1,采集待诊断谐波减速器的原始振动信号;
6、s2,基于采集的所述原始振动信号采用多元宇宙优化算法mvo自适应确定最小噪声幅度反褶积算法模型mnad的最优的关键参数组合,其中,所述关键参数组合包括滤波器长度l和周期噪声振幅比ρ;
7、s3,基于所述最优的关键参数组合采用所述最小噪声幅度反褶积算法模型mnad对所述原始振动信号进行信号增强处理得到原始振动信号对应的增强信号;
8、s4,采用集成经验模态分解算法eemd对所述增强信号进行模态分解,得到k个模态分量,其中,k为正整数;
9、s5,基于模态分解得到的所述k个模态分量构建多尺度模糊熵特征集;
10、s6,将所述多尺度模糊熵特征集输入到预设的故障分类器中进行故障识别和分类,判断所述待诊断谐波减速器是否有故障及故障类型。
11、优选地,步骤s2中,所述基于采集的所述原始振动信号采用多元宇宙优化算法mvo自适应确定最小噪声幅度反褶积算法模型mnad的最优的关键参数组合包括:
12、s21,设置所述多元宇宙优化算法mvo的初始参数,以及所述最小噪声幅度反褶积算法模型mnad的关键参数组合中的滤波器长度l和周期噪声振幅比ρ的取值范围;
13、s22,以所述原始振动信号的包络谱峰值因子作为所述多元宇宙优化算法mvo的适应度函数,并以所述包络谱峰值因子的结果的倒数的最小值作为目标函数值,基于所述初始参数和所述适应度函数采用多元宇宙优化算法mvo搜索最优的关键参数组合,得到初始最小包络谱峰值因子倒数值对应的最优的关键参数组合;
14、s23,更新所述多元宇宙优化算法mvo的虫洞存在概率和旅行距离率,然后执行微分变异操作,更新宇宙位置;
15、s24,循环迭代执行步骤s22~s23,当达到预设的最大迭代次数或得到最小包络谱峰值因子倒数值时,则满足终止循环迭代条件,得到最优的关键参数组合中的滤波器长度l和周期噪声振幅比ρ。
16、优选地,所述关键参数组合中,滤波器长度l的取值范围为[100,1000],周期噪声振幅比ρ的取值范围为[0.1,0.9]。
17、优选地,步骤s3中,所述基于所述最优的关键参数组合采用最小噪声幅度反褶积算法模型mnad对所述原始振动信号进行信号增强处理得到原始振动信号对应的增强信号包括:
18、s31,将所述所述最优的关键参数组合中的滤波器长度l和周期噪声振幅比ρ代入到所述最小噪声幅度反褶积算法模型mnad;
19、s32,通过削弱周期噪声振幅比来增强冲击的重复特性,并提取出所述原始振动信号中的代表故障的周期脉冲分量,得到所述增强信号。
20、优选地,步骤s5中,所述基于模态分解得到的所述k个模态分量构建多尺度模糊熵特征集包括:
21、s51,计算所述k个模态分量中除残差分量之外的其他k-1个模态分量的多尺度模糊熵;
22、s52,基于计算得到的所述k-1个模态分量的多尺度模糊熵构建所述多尺度模糊熵特征集。
23、本技术的第二个目的为提供一种基于自适应mnad的谐波减速器早期故障诊断系统。
24、本技术的上述申请目的二是通过以下技术方案得以实现的:
25、一种基于自适应mnad的谐波减速器早期故障诊断系统,所述系统包括:
26、振动信号采集模块,用于采集待诊断谐波减速器的原始振动信号;
27、最优参数组合自适应确定模块,用于基于采集的所述原始振动信号采用多元宇宙优化算法mvo自适应确定最小噪声幅度反褶积算法模型mnad的最优的关键参数组合,其中,所述关键参数组合包括滤波器长度l和周期噪声振幅比ρ;
28、信号增强处理模块,用于基于所述最优的关键参数组合采用所述最小噪声幅度反褶积算法模型mnad对所述原始振动信号进行信号增强处理得到原始振动信号对应的增强信号;
29、信号分解模块,用于采用集成经验模态分解算法eemd对所述增强信号进行模态分解,得到k个模态分量,其中,k为正整数;
30、特征集构建模块,用于基于模态分解得到的所述k个模态分量构建多尺度模糊熵特征集;
31、故障识别模块,用于将所述多尺度模糊熵特征集输入到预设的故障分类器中进行故障识别和分类,判断所述待诊断谐波减速器是否有故障及故障类型。
32、优选地,所述最优参数组合自适应确定模块包括:
33、参数设置单元,用于设置所述多元宇宙优化算法mvo的初始参数,以及所述最小噪声幅度反褶积算法模型mnad的关键参数组合中的滤波器长度l和周期噪声振幅比ρ的取值范围;
34、初始化处理单元,用于以所述原始振动信号的包络谱峰值因子作为所述多元宇宙优化算法mvo的适应度函数,并以所述包络谱峰值因子的结果的倒数的最小值作为目标函数值,基于所述初始参数和所述适应度函数采用多元宇宙优化算法mvo搜索最优的关键参数组合,得到初始最小包络谱峰值因子倒数值对应的最优的关键参数组合;
35、参数更新单元,用于更新所述多元宇宙优化算法mvo的虫洞存在概率和旅行距离率,然后执行微分变异操作,更新宇宙位置;
36、迭代计算单元,用于基于预设的最大迭代次数和最小包络谱峰值因子倒数值进行迭代计算,得到最优的关键参数组合中的滤波器长度l和周期噪声振幅比ρ。
37、优选地,所述关键参数组合中,滤波器长度l的取值范围为[100,1000],周期噪声振幅比ρ的取值范围为[0.1,0.9]。
38、优选地,所述信号增强处理模块包括:
39、参数输入单元,用于将所述所述最优的关键参数组合中的滤波器长度l和周期噪声振幅比ρ代入到所述最小噪声幅度反褶积算法模型mnad;
40、信号增强单元,通过削弱周期噪声振幅比来增强冲击的重复特性,并提取出所述原始振动信号中的代表故障的周期脉冲分量,得到所述增强信号。
41、优选地,所述特征集构建模块包括:
42、模糊熵计算单元,用于计算所述k个模态分量中除残差分量之外的其他k-1个模态分量的多尺度模糊熵;
43、模糊熵特征集构建单元,用于基于计算得到的所述k-1个模态分量的多尺度模糊熵构建所述多尺度模糊熵特征集。
44、本技术的第三个目的为提供一种基于自适应mnad的谐波减速器早期故障诊断装置。
45、本技术的上述申请目的三是通过以下技术方案得以实现的:
46、一种基于自适应mnad的谐波减速器早期故障诊断装置,包括:
47、存储器、处理器以及存储于所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述本技术的第一个目的中任意一项所述的基于自适应mnad的谐波减速器早期故障诊断方法的步骤。
48、本技术的第四个目的为提供一种计算机可读存储介质。
49、本技术的上述申请目的四是通过以下技术方案得以实现的:
50、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述本技术的第一个目的中任意一项所述的基于自适应mnad的谐波减速器早期故障诊断方法的步骤。
51、综上所述,本技术公开了基于自适应mnad的谐波减速器早期故障诊断方法、系统、装置及存储介质,通过采集待诊断谐波减速器的原始振动信号;基于采集的所述原始振动信号采用多元宇宙优化算法mvo自适应确定最小噪声幅度反褶积算法模型mnad的最优的关键参数组合;基于所述最优的关键参数组合采用所述最小噪声幅度反褶积算法模型mnad对所述原始振动信号进行信号增强处理得到原始振动信号对应的增强信号;采用集成经验模态分解算法eemd对所述增强信号进行模态分解,得到k个模态分量;基于模态分解得到的所述k个模态分量构建多尺度模糊熵特征集;将所述多尺度模糊熵特征集输入到预设的故障分类器中进行故障识别和分类,判断所述待诊断谐波减速器是否有故障及故障类型。
52、本技术利用多元宇宙优化算法mvo自适应确定最小噪声幅度反褶积算法模型mnad的最优的关键参数组合,并采用自适应确定得到的最优的关键参数组合通过最小噪声幅度反褶积算法模型mnad来对故障特征信号较弱的原始振动信号进行增强,结合集成经验模态分解算法eemd在故障特征提取方面的优势对增强信号进行模态分解后再进行故障识别和分类,从而能够有效提高谐波减速器的早期故障诊断的诊断结果准确率。
本文地址:https://www.jishuxx.com/zhuanli/20240802/258721.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。