一种改进YOLOv8的森林火情检测方法
- 国知局
- 2024-08-05 11:40:06
本发明属于图像检测,尤其涉及一种改进yolov8的森林火情检测方法。
背景技术:
1、森林火情检测是计算机视觉领域的一个重要的研究方向和技术挑战,由于频繁出现的森林火情不断危害着人们的生命财产安全,目前已经成为世界八大自然灾害之一。虽然护林人员能在一定程度上减少森林火情发生的概率,但是森林面积十分庞大,道路崎岖,杂草丛生,护林人员在森林中行走十分不便,如果突然发生紧急情况,撤离困难,存在较高的安全隐患,因此不宜依靠人力巡查森林火情。随着无人机与山地机器人技术的兴起,在森林火情领域中,使用目标检测算法逐渐成为新的方向。无人机与山地机器人通常会安装烟雾传感器、火焰传感器、温度传感器等对森林火情进行传感器检测,但是传感器检测容易受到环境影响,存在检测精度低的问题。如果使用机器学习的森林火情检测方法,需要强大的硬件支撑,不宜应用在无人机这类小型设备上,而使用改进yolov8的森林火情检测方法,可以极大程度地帮助人们在森林火情发生时,准确定位火情位置与燃烧程度,提高了森林火情检测的性能。
2、近年来,国内外学者对森林火情检测进行了深入的分析研究,其中在已有的文献中最著名和效果最好的方法主要包括:1.基于值转换注意力机制模块的多方向检测方法:2022年,hu y,zhan j,zhou g,et al.fast forest fire smoke detection using mvmnet[j].knowledge-based systems,2022,241:108219-108238.该方法基于水平和垂直方向的联合加权策略,构建值转换注意力机制模块提取烟雾的颜色和纹理,提高了烟雾检测精确度。2.一种利用相机图像的时空信息进行实时烟雾检测的深度学习方法:2022年,dewangana,pande y,braun h w,et al.figlib&smokeynet:dataset and deep learning modelfor real-time wildland fire smoke detection[j].remote sensing,2022,14(4):1007-1021.该方法在resnet34提取原始图像信息,lstm将当前帧中时间信息与前一帧中对应时间信息相结合,最后vit进行图像预测,减少了响应时间,增强了烟雾检测的精确度。3.一种适应于小目标森林火情检测的多尺度特征提取方法:2023年,zhang l,wang m,dingy,et al.ms-frcnn:a multi-scale faster rcnn model for small target forest firedetection[j].forests,2023,14(3):616-633.该方法利用resnet50作为faster rcnn的主干网络,特征金字塔多尺度特征提取的优势有助于模型获取细节特征信息的能力,在区域建议网络中使用pam注意力模块,通过通道注意力和空间注意力并行操作,减少图像中复杂背景的影响,关注小目标森林火情的语义和位置信息。该方法的检测精确度提高了5.7%。4.一种基于yolov5的森林火情检测模型:2023年,lin j,lin h,wang f.a semi-supervised method for real-time forest fire detection algorithm based onadaptively spatial feature fusion[j].forests,2023,14(2):361-381.首先将transformer编码器与卷积神经网络结合作为特征提取网络,增强对林火全局信息的提取。其次,融合了坐标注意力机制,不仅获取通道间信息,还考虑了方向相关的位置信息,帮助模型更好地定位和识别林火目标。最后,使用半监督学习节省人工标注工作。该方法更准确定位目标。
技术实现思路
1、为解决上述技术问题,本发明提出了一种改进yolov8的森林火情检测方法,以解决上述现有技术存在的问题。
2、为实现上述目的,本发明提供了一种改进yolov8的森林火情检测方法,包括:
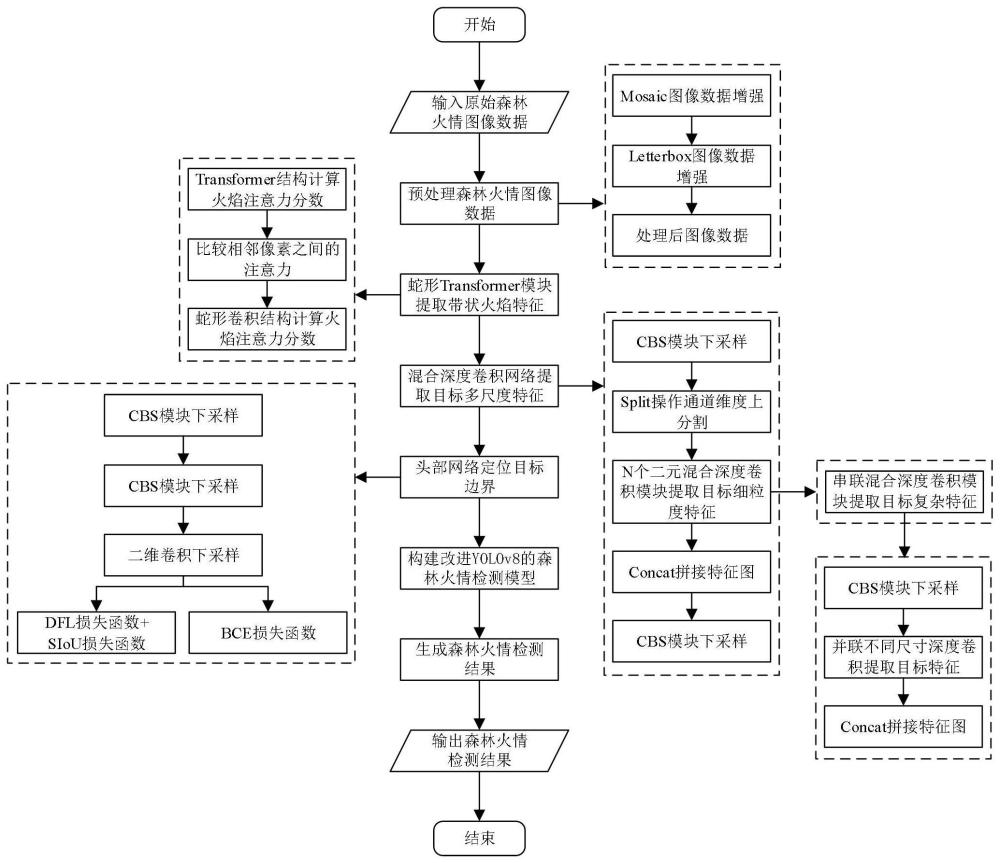
3、获取原始图像数据,对所述原始图像数据进行预处理,获得预处理后的图像数据;
4、将蛇形transformer模块作为骨干网络,将混合深度卷积网络作为颈部网络,将siou损失作为头部网络构建改进yolov8的森林火情检测模型;
5、将所述预处理后的图像输入至所述改进yolov8的森林火情检测模型中进行计算,获得森林火情检测结果。
6、优选的,所述获得预处理后的图像数据的过程包括:
7、随机读取四张原始图像数据,同时随机选择一个区域作为拼接的中心区域;
8、将所述四张原始图像数据进行随机裁剪、随机缩放、随机排布处理,然后基于所述中心区域对所述四张原始图像数据进行拼接,获得增强后的图像数据;
9、对所述增强后的图像数据进行letterbox图像数据增强,获得所述预处理后的图像数据。
10、优选的,基于所述蛇形transformer模块作为骨干网络提取带状火焰的特征信息;
11、所述提取带状火焰的特征信息的过程包括:
12、通过所述蛇形transformer模块和卷积结构提取火焰的局部特征,同时通过transformer结构提取全局特征,生成火焰注意力分数;
13、基于所述火焰注意力分数和蛇形卷积模块获取蛇形卷积处理后的特征向量;
14、将所述蛇形卷积处理后的特征向量转化为带状火焰的特征信息。
15、优选的,所述生成火焰注意力分数的表达式为:
16、score(q,k)=scoretr(q,k)+scoresc(scoretr(q,k));
17、scoretr表示transformer结构的火焰注意力分数,scoresc表示蛇形卷积的火焰注意力分数,q表示查询向量,k表示键向量,score(q,k)表示火焰注意力分数;
18、所述transformer结构的火焰注意力分数的表达式为:
19、
20、其中,t表示矩阵转置,表示键向量维度的平方根。
21、优选的,所述将混合深度卷积网络作为颈部网络捕捉目标火焰细粒度尺度信息;
22、所述捕捉目标火焰细粒度尺度信息的过程包括:
23、利用cbs模块提取火焰特征,得到h×w×c2特征图;
24、基于split操作对所述h×w×c2特征图的通道维度上进行分割操作,获得两个h×w×0.5c2特征图;
25、基于n个二元深度卷积模块对所述两个h×w×0.5c2特征图的目标细粒度尺度信息进行捕捉,获得h×w×0.5×n×c2尺寸的特征图;
26、对所述h×w×0.5×n×c2尺寸的特征图进行拼接,获得h×w×0.5(n+2)c2特征图;
27、基于cbs模块对所述h×w×0.5(n+2)c2特征图提取火焰特征,重新得到h×w×c2特征图,完成目标火焰细粒度尺度信息捕捉。
28、优选的,siou损失通过角度惩罚损失、距离损失、形状损失与iou损失构成;
29、所述角度惩罚损失用于衡量预测框与真实框之间的角度差异;
30、所述距离损失用于衡量预测框与真实框在距离方面的差异;
31、所述形状损失用于衡量预测框与真实框在形状方面的差异;
32、所述iou损失用于衡量预测框与真实框在重叠面积的差异。
33、优选的,所述角度惩罚损失的表达式为:
34、
35、
36、其中,ch为预测框与真实框中心点的高度距离,σ为预测框与真实框中心点的距离,当α为0或π/2时,角度惩罚损失λ为0。
37、优选的,所述预测框与真实框中心点的高度距离的表达式为:
38、
39、所述预测框与真实框中心点的距离的表达式为:
40、
41、其中,与表示为预测框的中心点坐标,与表示为真实框的中心点坐标。
42、与现有技术相比,本发明具有如下优点和技术效果:
43、本发明提出构建一种改进yolov8的森林火情检测方法,兼具提升森林火情目标检测的性能和泛化能力;本发明提出构建一种改进yolov8的森林火情检测模型,针对森林火情发生时,火焰顺山势蔓延呈细长状态,传统特征提取方法受自身限制,无法聚焦带状火焰的特征,导致检测模型精确度较低的问题,在骨干网络中提出蛇形transformer模块,通过结合卷积结构提取局部特征与transformer结构提取全局特征,并利用卷积操作改善transformer结构中的错误全局特征关联,进一步采用蛇形卷积聚焦蜿蜒细长火焰像素特征,有效提高模型的火焰特征提取能力;在本发明提出构建的一种改进yolov8的森林火情检测模型中,针对森林火情存在火焰和烟雾的边界轮廓不清晰,在无人机航拍高度与视角的影响下,图像中的火焰与烟雾尺度多样,定位困难的问题,在颈部网络中设计一种混合深度卷积网络捕捉目标细粒度尺度信息,利用两个提出的混合深度卷积模块串联获取多尺度目标特征,细化特征金字塔与路径聚合网络各层级对不同尺度目标的感知能力,mdc模块通过深度卷积拆分特征通道,促使不同感受野卷积核在对应特征通道内学习尺度敏感特征,在增加感受野的同时,缓解并行带来的速度损耗问题,在此基础上,为了提高模型对不规则形状和方向多变的火情目标定位能力,在头部网络中引入siou损失函数,利用角度惩罚更准确定位烟雾边界。本发明提出的一种改进yolov8的森林火情检测方法,能够有效地完成森林火情检测任务,并提升检测精确度。
本文地址:https://www.jishuxx.com/zhuanli/20240802/258708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。