一种采用自注意力领域自适应图卷积网络的轴承故障诊断方法及装置
- 国知局
- 2024-08-05 11:39:56
本发明涉及机器学习领域,特别是涉及一种采用自注意力领域自适应图卷积网络的轴承故障诊断方法及装置。
背景技术:
1、轴承故障诊断是工业领域的一个重要问题。在许多机械设备中,轴承是关键的组成部分,其性能直接影响到设备的运行状态和生产效率。然而,由于各种原因,轴承可能会出现故障,如疲劳、磨损、过热等。这些故障如果不能及时发现和处理,可能会导致设备停机,甚至发生严重的安全事故。因此,对轴承的状态进行实时监控和故障诊断,对保证设备的正常运行和提高生产效率具有重要意义。
2、传统上,人们依赖人工检查和经验丰富的技术人员来诊断轴承故障,但这种方式存在许多缺陷,如效率低下、主观性强等。随着人工智能技术的不断发展,研究人员开始探索利用深度学习等先进技术来实现轴承故障的自动诊断。其中,图神经网络是一种在非欧几里得数据上进行深度学习的有效方法,已被广泛应用于图结构数据建模,例如社交网络分析和分子指纹识别等领域。然而,传统图神经网络仅限于对二元关系的建模、无法有效捕捉高阶关系,如社区或者聚类等,而这些高阶关系在复杂网络中很常见。为了解决这个问题,超图(hypergraph)被提出,作为一种推广的图结构来刻画高阶关系。与普通图只能描述节点对之间的边不同,超图允许一条超边包含任意数量的节点,从而能够刻画非成对关系。在轴承故障诊断中,超图可以用来描述轴承的多种状态和故障模式,从而提高故障诊断的准确性。
3、最近,基于超图的深度学习方法如超图卷积神经网络(hgnn)得到了广泛关注。受计算机视觉中的卷积神经网络(cnn)[krizhevsky等人,2012]的启发,研究人员设计了用于半监督学习的基于图的神经网络,如cnn[kipf和welling,2017]和gat[velickovi等人,2018]。此外,hgnn[feng et al.,2018]是第一个超图神经网络模型。但是现有方法存在一个主要缺陷,即它们只利用了初始的固定超图结构,而忽视了在神经网络深层中可能出现的新的高阶关系。由于网络的非线性变换,更深层特征可能会包含初始超图结构无法刻画的新的局部或全局关系模式。因此,如何动态更新超图结构以捕捉深层特征中的高阶关系仍然是一个有待解决的挑战。在轴承故障诊断中,这种动态更新的能力可以更好地捕捉和理解轴承的故障模式和状态变化。
4、为了解决该问题,zhang等人提出了动态超图结构学习(dynamic hypergraphstructure learning,dhsl)来处理这个问题,dhsl通过使用原始输入数据迭代优化超图结构。尽管取得了一定进展,dhsl仅在初始特征嵌入时更新超图结构,未能利用特征之间的高阶关系。而且,dhsl中的迭代优化在时间和空间上都有昂贵的代价。
5、另一方面,领域自适应思想的引入为进一步提高轴承故障诊断性能带来了新的可能。由于不同类型的轴承在制造、使用环境等方面存在差异,直接将在某一领域训练好的模型应用到另一领域可能会导致性能下降。近年来,一些学者尝试将领域自适应思想应用于图结构数据。cdne算法通过最小化最大平均差异(mmd)损失来学习跨网络学习任务的可转移节点嵌入。但是,它不能对网络结构和节点属性进行联合建模,这限制了它的建模能力。为了利用网络结构进行跨网络节点分类,adagcn算法使用图卷积网络作为特征提取器学习节点表示,并利用对抗学习策略学习域不变节点表示。虽然利用gcns和对抗学习共同提高图结构数据的跨域节点分类性能似乎是合理的,但这些现有的方法仍然不能有效地处理在域自适应学习层面的挑战。
6、现有轴承故障检测的机器学习模型没有很好结合多传感器数据进行融合,同时很难通过迁移学习以适应不同类型的轴承在制造、使用环境等方面的差异,二者都导致了现在通过机器学习方法进行轴承故障诊断的准确率不高。
技术实现思路
1、有鉴于现有技术的上述的一部分缺陷,本发明所要解决的技术问题是提供一种采用自注意力领域自适应图卷积网络的轴承故障诊断方法及装置,旨在提高轴承故障诊断的准确率。
2、为实现上述目的,本发明第一方面公开了一种采用自注意力领域自适应图卷积网络的轴承故障诊断方法,所述方法包括:
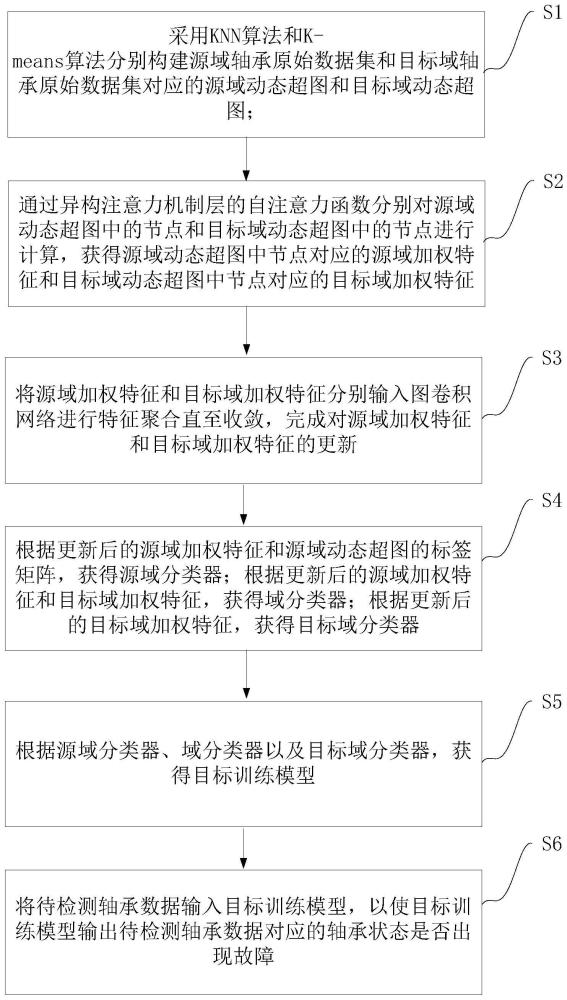
3、步骤s1、采用knn算法和k-means算法分别构建源域轴承原始数据集和目标域轴承原始数据集对应的源域动态超图和目标域动态超图;其中,所述源域轴承原始数据集中的数据为带有标签的已知标准数据,所述目标域轴承原始数据集中的数据为目标训练模型对应的数据,所述源域动态超图包括源域节点集、源域超边集、源域邻接矩阵以及标签矩阵,所述目标域动态超图包括目标域节点集、目标域超边集以及目标域邻接矩阵;
4、步骤s2、通过异构注意力机制层的自注意力函数分别对所述源域动态超图中的节点和所述目标域动态超图中的节点进行计算,获得所述源域动态超图中节点对应的源域加权特征和所述目标域动态超图中节点对应的目标域加权特征;
5、步骤s3、将所述源域加权特征和所述目标域加权特征分别输入图卷积网络进行特征聚合直至收敛,完成对所述源域加权特征和所述目标域加权特征的更新;
6、步骤s4、根据更新后的所述源域加权特征和所述源域动态超图的所述标签矩阵,获得源域分类器;根据更新后的所述源域加权特征和所述目标域加权特征,获得域分类器;根据更新后的所述目标域加权特征,获得目标域分类器;
7、步骤s5、根据所述源域分类器、所述域分类器以及所述目标域分类器,获得所述目标训练模型;
8、步骤s6、将待检测轴承数据输入所述目标训练模型,以使所述目标训练模型输出所述待检测轴承数据对应的轴承状态是否出现故障。
9、可选的,所述步骤s1包括:
10、分别对分别构建所述源域轴承原始数据集和所述目标域轴承原始数据集进行傅里叶变换,并计算短时平谱密度图,获得所述源域轴承原始数据集的第一频率索引和所述目标域轴承原始数据集的第二频率索引;
11、根据所述第一频率索引构建源域时空图;根据所述第二频率索引构建目标域时空图;
12、根据所述源域时空图,进行计算获得所述源域动态超图;根据所述目标域时空图,进行计算获得所述目标域动态超图。
13、可选的,所述步骤s2包括:
14、获得对所述源域动态超图中节点对应的第一查询向量、第一键向量以及第一值向量;获得所述目标域动态超图中节点对应的第二查询向量、第二键向量以及第二值向量;
15、将所述第一查询向量、所述第一键向量以及所述第一值向量代入异构注意力机制层的自注意力函数,获得所述源域动态超图中节点对应的所述源域加权特征;将所述第二查询向量、所述第二键向量以及所述第二值向量代入异构注意力机制层的自注意力函数,获得所述目标域动态超图中节点对应的所述目标域加权特征。
16、可选的,所述步骤s3包括:
17、将所述源域加权特征输入图卷积网络,以使所述图卷积网络结合所述源域邻接矩阵对应的归一化矩阵对所述源域加权特征进行特征聚合直至收敛,完成对对所述源域加权特征的更新;
18、将所述目标域加权特征输入图卷积网络,以使所述图卷积网络结合所述目标域邻接矩阵对应的归一化矩阵对所述目标域加权特征进行特征聚合直至收敛,完成对对所述目标域加权特征的更新。
19、可选的,所述源域轴承原始数据集来自固定的标准轴承在标准环境下产生的带有标签的数据,所述目标域轴承原始数据集为从需要检测轴承上采集的数据,且所述目标域轴承原始数据集中的数据不带有标签或一部分带有标签;所述轴承原始数据集和所述目标域轴承原始数据集中的数据均为振动信号。
20、本发明第二方面公开了一种采用自注意力领域自适应图卷积网络的轴承故障诊断装置,所述装置包括:超图构建模块、加权特征获得模块、特征聚合模块、分类器获得模块、模型获得模块以及故障检测模块;
21、所述超图构建模块,用于采用knn算法和k-means算法分别构建源域轴承原始数据集和目标域轴承原始数据集对应的源域动态超图和目标域动态超图;其中,所述源域轴承原始数据集中的数据为带有标签的已知标准数据,所述目标域轴承原始数据集中的数据为目标训练模型对应的数据,所述源域动态超图包括源域节点集、源域超边集、源域邻接矩阵以及标签矩阵,所述目标域动态超图包括目标域节点集、目标域超边集以及目标域邻接矩阵;
22、所述加权特征获得模块,用于通过异构注意力机制层的自注意力函数分别对所述源域动态超图中的节点和所述目标域动态超图中的节点进行计算,获得所述源域动态超图中节点对应的源域加权特征和所述目标域动态超图中节点对应的目标域加权特征;
23、所述特征聚合模块,用于将所述源域加权特征和所述目标域加权特征分别输入图卷积网络进行特征聚合直至收敛,完成对所述源域加权特征和所述目标域加权特征的更新;
24、所述分类器获得模块,用于根据更新后的所述源域加权特征和所述源域动态超图的所述标签矩阵,获得源域分类器;根据更新后的所述源域加权特征和所述目标域加权特征,获得域分类器;根据更新后的所述目标域加权特征,获得目标域分类器;
25、所述模型获得模块,用于根据所述源域分类器、所述域分类器以及所述目标域分类器,获得所述目标训练模型;
26、所述故障检测模块,用于将待检测轴承数据输入所述目标训练模型,以使所述目标训练模型输出所述待检测轴承数据对应的轴承状态是否出现故障。
27、可选的,所述超图构建模块具体用于:
28、分别对分别构建所述源域轴承原始数据集和所述目标域轴承原始数据集进行傅里叶变换,并计算短时平谱密度图,获得所述源域轴承原始数据集的第一频率索引和所述目标域轴承原始数据集的第二频率索引;
29、根据所述第一频率索引构建源域时空图;根据所述第二频率索引构建目标域时空图;
30、根据所述源域时空图,进行计算获得所述源域动态超图;根据所述目标域时空图,进行计算获得所述目标域动态超图。
31、可选的,所述加权特征获得模块具体用于:
32、获得对所述源域动态超图中节点对应的第一查询向量、第一键向量以及第一值向量;获得所述目标域动态超图中节点对应的第二查询向量、第二键向量以及第二值向量;
33、将所述第一查询向量、所述第一键向量以及所述第一值向量代入异构注意力机制层的自注意力函数,获得所述源域动态超图中节点对应的所述源域加权特征;将所述第二查询向量、所述第二键向量以及所述第二值向量代入异构注意力机制层的自注意力函数,获得所述目标域动态超图中节点对应的所述目标域加权特征。
34、可选的,所述特征聚合模块具体用于:
35、将所述源域加权特征输入图卷积网络,以使所述图卷积网络结合所述源域邻接矩阵对应的归一化矩阵对所述源域加权特征进行特征聚合直至收敛,完成对对所述源域加权特征的更新;
36、将所述目标域加权特征输入图卷积网络,以使所述图卷积网络结合所述目标域邻接矩阵对应的归一化矩阵对所述目标域加权特征进行特征聚合直至收敛,完成对对所述目标域加权特征的更新。
37、可选的,所述源域轴承原始数据集来自固定的标准轴承在标准环境下产生的带有标签的数据,所述目标域轴承原始数据集为从需要检测轴承上采集的数据,且所述目标域轴承原始数据集中的数据不带有标签或一部分带有标签;所述轴承原始数据集和所述目标域轴承原始数据集中的数据均为振动信号。
38、本发明的有益效果:1、针对现有超图构图方法只考虑单个传感器信号的局限性,本发明提出了kkdsg(knn kmeans dynamic supergraph)构图方法,采用knn方法生成基本超边,并通过聚类算法(即k-means聚类)扩展相邻超边集,来提取局部关系和全局关系。这种方法能够有效建模来自多个异构传感器的数据,从而更好地解决实际多传感器故障诊断问题。即,本发明可以结合多个传感器数据,对轴承状态进行判定,避免基于单一数据带来的判定失误,提高了轴承故障诊断的准确性。2、本发明设计一种自注意力领域自适应图卷积网络(self-attention domain adaptive graph convolution network,sa-dagcn)模型,融合了自注意力机制,可自适应分配权重突出关键故障特征,提高了模型在复杂情况下的诊断精度。3、本发明引入了领域自适应学习策略,联合利用源域、目标域和领域信息,增强了模型的跨领域迁移能力,从而能更好地应用于智能制造等场景。本发明可以通过上述方法使得迁移学习在轴承故障诊断中容易实现,这样模型可以通过迁移学习适应不同类型的轴承在制造、使用环境等方面的差异,从而提高模型进行轴承故障诊断的准确率。另一方面比起直接再训练一个模型,本发明无需对需求模型的训练数据进行再一次的标签添加,本发明的迁移学习可以大大减少模型训练时间,提高模型训练效率。
39、综上,本发明可以提高了轴承故障诊断对应的机器学习模型的训练效率,同时结合超图、自注意力机制进行训练,进而了模型对轴承故障诊断的准确率。
本文地址:https://www.jishuxx.com/zhuanli/20240802/258687.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表