一种水面光电稳定制导平台及制导方法
- 国知局
- 2024-08-05 11:47:21
本发明属于光电探测成像辅助设备领域,具体涉及一种水面光电稳定制导平台及制导方法。
背景技术:
1、目前,在对海上远距离目标实时感知以及远场海域水面、近海码头目标信息及图像获取时,一般选择光电桅杆作为水下载体或利用潜望镜予以探测。使用光电桅杆、潜望镜时,由于长时间暴露,易被发现,且潜望高度低、不能远距离观察。因此,通常的方法是将水下载体行进至预定海域直接获取。水下载体要到达预定区域,多采用水下声纳探测距离和导引。显而易见,此种方法的弊端是,声纳易被发现从而暴露水下载体,未到达预定海域之前就被发现,从而对自身安全带来威胁。因此,目前的水下载体进行海上远场目标、以及近岸海域水面和陆地目标图像获取手段隐蔽性差,危险程度高。同时,目前的光电探测采用折返光路方案,需要利用快反镜从而实现系统稳定,其控制系统复杂,且视场角小,而大的视场角使得整个系统体积庞大,且装配复杂,易出现探测死角。亟需一种能够安装于水面浮标并能稳定进行水面目标识别及导引的稳定平台装置及方法。
技术实现思路
1、本发明提出的一种水面光电稳定制导平台及制导方法,平台具有可见光及红外双波段探测,可适应不同的气象条件及昼夜工作;利用该小型化光电成像稳定平台系统获取的目标数据,不受近岸水声影响,具有较好的隐蔽性,与水下载体的通信可实现对水下载体的精确导引。
2、本发明采取的技术方案是:
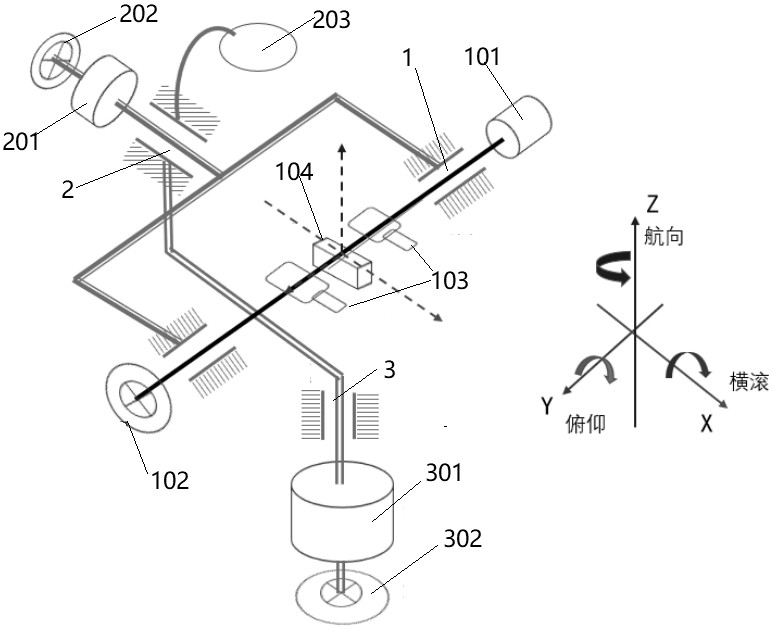
3、一种水面光电稳定制导平台,包括y轴方向的内框、x轴方向的中框和z轴方向的外框;所述内框为俯仰轴,中框为横滚轴,外框为航向周视扫描轴,内框连接在中框上,中框连接在外框上;
4、所述内框为直线状空心轴,在内框两端分别设置内框电机和内框光电编码器,在内框中部设有探测器、imu传感器;
5、所述中框由直线部分和u型部分固定而成,在中框的直线轴端连接中框电机和中框光电编码器,在中框上还连接有导航模块;
6、所述外框由三段构成,在其中的一个垂直段上连接有外框电机和外框光电编码器;
7、所述内框电机、内框光电编码器、探测器、imu传感器、中框电机、中框光电编码器、导航模块、外框电机、外框光电编码器均与伺服控制系统连接。
8、进一步的,所述探测器为可见光及红外双波段探测器。
9、进一步的,所述内框电机、中框电机和外框电机均为直驱无框电机。
10、探测器为可见光探测器和红外焦平面探测器,实现目标物可见及红外双波段探测成像;内框安装集成imu传感器,实时提供内框平台的三维姿态信息,内框轴端的内框电机借助伺服控制系统,根据三轴陀螺的角度及加速度分量等数据,结合内框光电编码器数据驱动内框电机,实现内框轴俯仰调节。
11、中框为内框和外框的连接框架。中框根据内框imu传感器的姿态陀螺的y轴角度分量和中框光电编码器数据,通过伺服控制系统,驱动中框电机横滚,结合内框的俯仰调节,从而保证设置在内框上的探测器保持水平稳定工作。中框上安装的导航模块,实时获取平台的坐标信息,实时提供载体位置坐标。
12、平台工作启动后,内框保证水平稳定姿态,外框周视扫描,带动内框的探测器搜索目标,完成图像识别、锁定,利用图像识别算法追踪目标并驱动外框运动,保持对目标的实时跟踪,结合载体位置坐标信息实现目标的方位导引。
13、进一步的,所述伺服控制系统采用以电流环、速度环和位置环构成的三环结构进行驱动控制;
14、所述电流环作为速度环的内环,由电流感应器、电流控制器、电机驱动器和电机组成;
15、所述速度环由速度控制器、电流环、平台框架、负载、集成imu组成,集成imu包含陀螺仪、加速度计、磁力计和滤波器;其中,速度环通频带宽大于干扰力矩频率,引起干扰力矩的因素包括负载姿态变化和弹性变形,以及电子系统的噪声;
16、所述位置环由位置控制器、速度环、三个光电编码器组成。
17、电流环可以充分减小电流波动对速度环的影响,提高电机力矩的线性度,从而提高速度环的稳定精度。速度环是电流环的外环,同时是位置环的内环,在稳定平台系统中,速度环的性能对整个系统的性能有很大影响。位置环是整个系统的最外环,是实现平台光电探测器视轴位置控制的一环。
18、一种水面光电稳定制导平台的制导方法,包括以下步骤:
19、s1:开机自检
20、开启制导平台电源,对探测器、imu传感器、内框光电编码器、中框光电编码器、外框光电编码器、导航模块、伺服控制系统进行自检,通信正常且反馈数据在设定范围内,则系统自检通过;
21、s2:制导平台稳定状态调节
22、当制导平台由于外界因素的干扰而无法处于水平状态时,使得内框和中框上的负载分别绕各自支撑轴转动,导致imu传感器侦测到各框体支撑轴有位置偏差,该位置偏差转换为电压信号,该电压信号被采集并进行积分后输入到位置环的位置控制器;
23、与此同时,负载转动的角速度被转化成陀螺仪的进动角,该进动角经信号转换、放大为电压信号,进一步转换为数字信号,通过mcu运算后,mcu发出信号到速度环的速度控制器,速度控制器将电压信号转换为电流信号,通过电流环的电流控制器送给电机驱动器,电机驱动器会给相应电机发送电流脉冲,使相应的工作轴往平台稳定的状态进动;在此过程中,位置控制器根据初始的位置指令实时监测平台框架复位状态,当复位后,电机停止驱动,平台框架达到平稳状态;
24、s3:装订数据加载
25、根据提前装订的数据,设置目标的识别参数;
26、s4:大地坐标定位
27、读取导航模块的大地坐标参数及平台初始方位;
28、s5:工况判定
29、按照步骤s2中的方法保持平台框架实时稳定,同时,外框方位轴周视扫描后判定当前的环境工况,并完成海平面基准提取;
30、s6:目标识别与锁定
31、根据装订加载的目标特征信息,周视扫描环境,识别并判定目标位置;根据识别的目标位置信息,对目标区域图像进行集中处理,得到实时性更好的位置信息;
32、s7:目标跟踪
33、根据锁定的目标的动态轨迹及环境工况,驱动制导平台,对目标实时跟踪,使目标始终处于探测器视场中心;根据跟踪目标相对于制导平台的实时位置信息,结合制导平台大地坐标及方位,给出目标的方位数据,发送给水下潜器,实现跟踪制导。
34、进一步的,步骤s6的目标识别与锁定,具体过程为:
35、平台框架水平稳定后,方位轴会周视扫描,当识别到光电探测器获取目标物图像后,识别算法根据目标物图像的轮廓数据计算出图像的中心,并将目标图像中心置于探测器靶面中心,保证识别图像在光电探测器的中心,从而实现制导平台对目标的锁定。
36、进一步的,步骤s7的目标跟踪过程为:
37、在平台框架恢复到平稳状态的过程中,光电探测器采集目标图像信号,解算光电探测器的视轴相对平台框架与目标连线的夹角,即确定出视轴跟踪误差,将该误差经过滤波器滤波后,补偿图像采集与处理中的滞后和探测噪声,得到跟踪误差及其变化率的预报值,再经坐标变换解算出跟踪指令输出到位置环光电编码器,经光电编码器输出角度指令转化为电流信号,输入到速度环陀螺仪,实现在消除扰动的同时跟踪目标。
38、本发明的有益效果:
39、与常规水下载体提供的跟踪导引装置相比,本发明三轴浮标式光电探测稳定制导更加小型化,体积小,重量轻,结构紧凑,灵敏度高。不受近岸噪声影响,可用于近岸海面目标及陆地目标的探测。
40、本浮标稳定制导平台搭载了可见光与红外探测器,可为水下载体提供全天候目标搜索与导引,可适应复杂的气象条件。
41、可用于水下潜航器提供探测导航外,还可用于水面舰船、无人船、水面巡逻艇等,可用于水面监测、搜救等应用领域广泛,在工业、民用及军事领域具有非常重要的经济价值和意义。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259412.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表