一种环境三维重建与识别的无人机导航方法
- 国知局
- 2024-08-05 11:48:35
本发明属于无人机导航和识别的,具体涉及一种环境三维重建与识别的无人机导航方法。
背景技术:
1、在今天的动态世界中,无人机的角色变得越来越多样化和关键,从军事侦察到城市救援行动中,它们的应用范围不断扩大。尤其是在密集的城市建筑群或建筑物内部的未知空间,面临着没有地磁场和外部导航场的挑战,使得无人机在自主飞行方面必须依靠更进阶的技术以保障其效能与安全。
2、遥控机器人系统尽管被广泛应用,但在通信频道上仍存在显著的弱点。不幸的是,电子干扰和战术反制措施的存在,使得无线电信号的不稳定性成为一个突出问题。这一现实推动了军事和专业移动机器人向着更高程度的自主性转型,减少对人类操作员和易受干扰的通信信道的依赖。
3、在推进自主控制系统的过程中,构建精确的外部环境模型是一个关键任务。它不仅允许机器人系统规划移动轨迹,还解决了复杂的导航难题。传统上,这一模型是通过扫描激光测距仪获取的几何数据来构建的,这在人工环境和坚实地面中相对容易实现。但自然环境中存在的可克服和不可逾越的障碍,要求模型必须包含更多的维度和数据类型。
4、为此,无人机系统需要整合来自多种传感器的数据,捕捉地面的细节和特性。这种多维数据集成为确保无人机在没有地磁场和外部导航场支持下,能在城市密集建筑区或建筑物内自主飞行提供了解决方案。为了提高无人机系统的工作效率和安全性,在建立外部环境模型时需要结合多种传感器的数据,以获得更全面的地面特征和性质信息。
技术实现思路
1、本发明的目的在于针对现有技术中的上述不足,提供一种环境三维重建与识别的无人机导航方法,以解决现有无人机在没有地磁场和外部导航场的支持下,难以自主飞行的问题。
2、为达到上述目的,本发明采取的技术方案是:
3、一种环境三维重建与识别的无人机导航方法,其包括以下步骤:
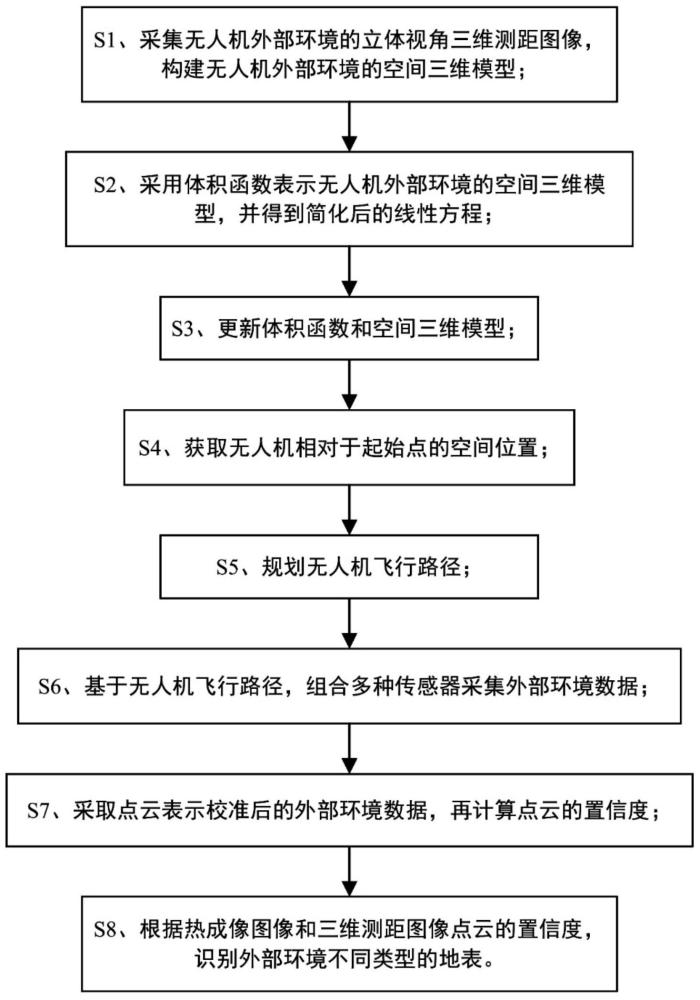
4、s1、采集无人机外部环境的立体视角三维测距图像,根据所述立体视角三维测距图像,构建无人机外部环境的空间三维模型;
5、s2、采用体积函数表示无人机外部环境的空间三维模型,并根据高斯-牛顿法对所述体积函数进行求解,得到简化后的线性方程;
6、s3、采用鲁棒最小二乘法求解所述线性方程,更新所述体积函数和所述空间三维模型;
7、s4、根据三维传感器数据和固态惯性传感器数据,得到无人机相对于起始点的空间位置;
8、s5、基于更新后的空间三维模型和无人机相对于运动起始点的空间位置,规划无人机飞行路径;
9、s6、基于无人机飞行路径,组合多种传感器采集外部环境数据;
10、s7、对采集的外部环境数据进行相互校准处理,将不同的外部环境数据组合到一个坐标系中的目标内,并采用点云表示校准后的外部环境数据,再计算点云的置信度;
11、s8、根据热成像图像和三维测距图像点云的置信度,识别外部环境不同类型的地表。
12、进一步地,步骤s1具体包括:
13、在无人机上搭载具有主动照明的三维测距仪,采用三维测距仪采集得到若干立体视角三维测距图像,将若干立体视角三维测距图像按顺序整合至空间模型中,得到空间三维模型。
14、进一步地,步骤s2包括:
15、采用体积函数表示空间三维模型,所述体积函数的二次函数表示为:
16、
17、采用高斯-牛顿法对所述二次函数进行求解,得到简化后的线性方程:
18、
19、其中,为体积函数的二次函数,为体积函数,为传感器和被控对象新位置的坐标,为传感器和被控对象新位置的坐标的k阶导数; a为=0的展开式中的符号表达,即;为=0的展开式中的符号表达,即;为三维测距图像中测距像素的索引,为三维测距图像的像素坐标集;为体积函数的梯度;为函数梯度的表达符号。
20、进一步地,步骤s3包括:
21、采用鲁棒最小二乘法求解所述线性方程,并定义噪声为高斯噪声,得到线性方程的解为:
22、
23、其中,为正则化参数,为单位矩阵;
24、将解代入所述步骤s2中的线性方程内,即更新所述体积函数和所述空间三维模型。
25、进一步地,步骤s3还包括:
26、通过移动平均值方法更新无人机外部环境的立体视角三维测距图像的每个采样点:
27、
28、其中,w和d分别为每个采样点的权重和值;和分别为新三维测距图像的权重和值。
29、进一步地,步骤s6中组合多种传感器包括:摄像机、3d激光雷达、安装在旋转装置上的2d-激光雷达、图像传感器、热成像仪、卫星-惯性组合导航系统。
30、进一步地,步骤s7包括:
31、s7.1、对采集的外部环境数据进行相互校准处理,包括传感器坐标的相对线性和角度偏差确定,摄像机和热成像仪镜头的几何畸变确定;
32、s7.2、采用点云t表示校准后的外部环境数据:
33、<mstyle displaystyle="true" mathcolor="#000000"><mi>t</mi><mi>=</mi><mi>[</mi><msub><mi>t</mi><mi>i</mi></msub><mi>]</mi><mi>=</mi><mi>[</mi><mi><</mi><msub><mi>α</mi><mi>i</mi></msub><mi>,</mi><msub><mi>β</mi><mi>i</mi></msub><mi>,</mi><msub><mi>d</mi><mi>i</mi></msub><mi>,</mi><msub><mi>i</mi><mi>i</mi></msub><mi>,</mi><msub><mi>r</mi><mi>i</mi></msub><mi>,</mi><msub><mi>g</mi><mi>i</mi></msub><mi>,</mi><msub><mi>b</mi><mi>i</mi></msub><mi>,</mi><msub><mi>y</mi><mi>i</mi></msub><mi>></mi><mi>],</mi><mi>i</mi><mi>=</mi><mn>1</mn><mi>,</mi><mn>2</mn><mi>,...,</mi><mi>n</mi></mstyle>
34、其中,n为点云的点数;分别为3d激光雷达的水平和垂直扫描角度;为测量距离;为测量的反射探测信号的强度;为图像传感器像素的3个颜色分量;为热成像仪的像素温度;
35、s7.3、计算第i个点云属于第k类地表的置信度:
36、
37、其中,, , 为根据颜色、温度以及第i个点周围的固定半径区域内的点的高度变化的分析结果;, , 为权重系数;
38、s7.4、计算每个点到第k类地表对应连通区域的中心的距离:
39、
40、其中,为颜色分量的权重系数;,为色调,为饱和度,为测量亮度;分别为第k类地表对应的色调、饱和度、测量亮度对应的值;为第i个点云的hsv颜色模型。
41、进一步地,步骤s8中根据热成像图像点云的置信度,识别外部环境不同类型的地表,包括:
42、计算第k类地表的温度特征的参考值与第i个点的温度特征值之间的距离:
43、
44、根据距离,计算热成像图像点云的置信度:
45、
46、其中,是距离的阈值,超过该阈值的点则被定义为不属于第k类地表。
47、进一步地,步骤s8中根据三维测距图像点云的置信度,识别外部环境不同类型的地表,包括:
48、采用固定半径范围内点的高度与第i个点中心间的距离作为特征:
49、
50、其中,为区域内点的高度;为区域内点的数量;为区域内高度的平均值;
51、计算特征点云的置信度:
52、
53、
54、其中,为第k类地表的高度偏差特征与第i个点的高度偏差特征值之间的距离;为距离的阈值;为第k类地表均方差的参考值,超过该阈值的点则被定义为不属于第k类地表。
55、本发明提供的环境三维重建与识别的无人机导航方法,具有以下有益效果:
56、1、本发明利用环境三维重建技术,构建和调整飞行轨迹,实现了无人机在城市密集建筑区或建筑物内部的自主飞行能力。
57、2、本发明利用相关极值导航方法和最小化测距图像差异函数的求解,提高了位置定位的准确性,并能保存与坐标有关的测距图像。
58、3、本发明通过实时生成外部环境的立体视角三维测距图像,并更新体积函数,能够实时确定无人机相对于起始点的空间位置,并用于规划飞行路径。
59、4、本发明采用多种传感器的组合来获取几何数据和其它地表特征,通过分析特征数据和使用权重系数,能够识别不同类型的地表。
60、5、本发明可实现自主飞行、准确定位、多维数据保存和分析以及多传感器组合应用等有益效果,提升了无人机在复杂环境下的飞行能力和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259525.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。