智能收割机器人、智能收割方法及存储介质与流程
- 国知局
- 2024-08-05 11:58:50
本技术实施例涉及计算机,特别涉及一种智能收割机器人、智能收割方法及存储介质。
背景技术:
1、随着农业现代化的发展,传统的人工收割方式已经不能满足日益增长的农产品需求。虽然目前已提出机械化收割方案,但是由于机械化的收割工具仍然无法适应多变的农田环境,因此仍需要人工操控或驾驶机械化的收割工具进行收割,需要消耗人力,且收割效率低。
技术实现思路
1、本技术实施例提供了一种智能收割机器人、智能收割方法及存储介质,能够提高收割效率。所述技术方案如下:
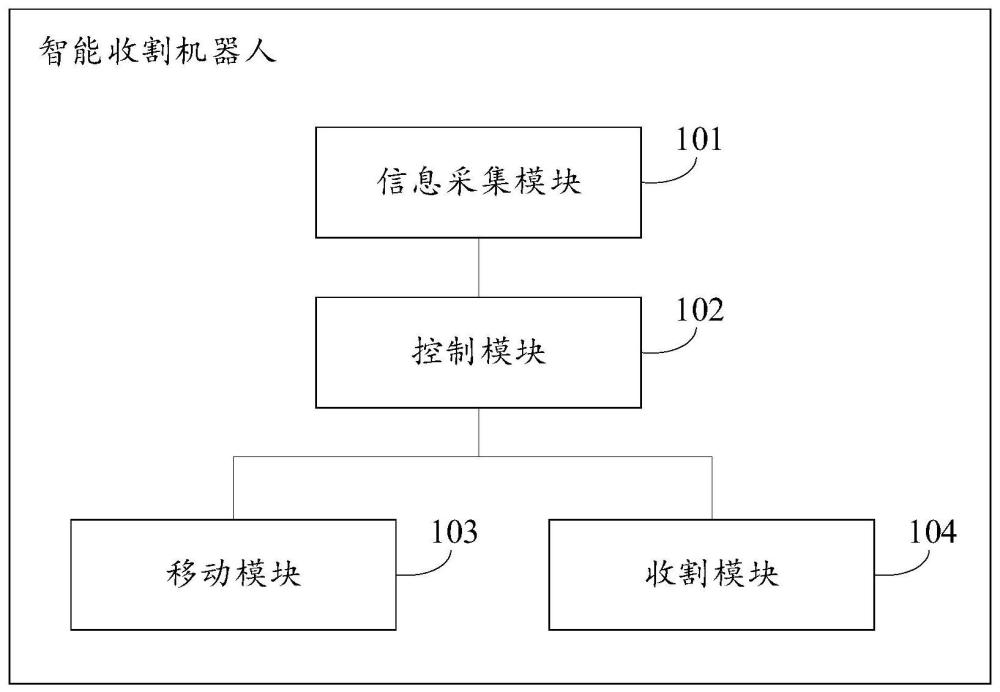
2、一方面,提供了一种智能收割机器人,包括信息采集模块、控制模块、移动模块和收割模块,所述信息采集模块与所述控制模块连接,所述控制模块与所述移动模块和所述收割模块连接;
3、所述信息采集模块,用于采集作物的关联信息,所述关联信息包括所述作物的作物信息和所述作物所处环境的环境信息;
4、所述控制模块,用于获取所述关联信息,基于所述关联信息,生成移动策略和收割策略;
5、所述移动模块,用于按照所述移动策略进行移动;
6、所述收割模块,用于按照所述收割策略对所述作物进行收割。
7、可选地,所述控制模块,用于每隔第一预设时长,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
8、可选地,所述移动模块,还用于在按照所述移动策略进行移动的过程中,如果移动方向上存在障碍物,则向所述控制模块发送策略更新请求;
9、所述控制模块,用于响应于所述策略生成请求,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
10、可选地,所述移动模块,还用于在按照所述移动策略进行移动的过程中,如果移动方向上存在障碍物,则停止按照所述移动策略进行移动,在停止移动的时长未达到第二预设时长时所述障碍物离开所述移动方向的情况下,继续按照所述移动策略进行移动。
11、可选地,所述移动模块,还用于在停止移动的时长达到所述第二预设时长时所述障碍物仍未离开所述移动方向的情况下,向所述控制模块发送策略更新请求;
12、所述控制模块,用于响应于所述策略生成请求,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
13、可选地,所述作物信息包括作物类别、作物成熟度或作物韧度中的至少一项;
14、所述环境信息包括所述作物的位置、所述作物所处环境中障碍物的位置、所述环境的湿度中的至少一项。
15、可选地,所述移动策略包括移动方向;所述控制模块,用于基于所述作物的位置和所述作物所处环境中障碍物的位置,生成所述移动方向,所述移动方向上具有所述作物且不具有所述障碍物。
16、可选地,所述控制模块,还用于执行以下至少一项:
17、基于所述作物类别和所述作物成熟度,生成所述移动方向,所述移动方向上的作物的成熟度满足收割条件;
18、基于所述环境的湿度,生成所述移动方向,所述移动方向上的湿度满足收割条件。
19、可选地,所述移动策略包括移动速度;所述控制模块,用于基于所述作物韧度,生成所述移动速度,所述移动速度与所述作物韧度负相关。
20、可选地,所述收割策略包括所述智能收割机器人的收割转速、收割角度或收割高度中的至少一项;所述控制模块,用于基于所述作物类别和所述作物的位置,生成所述收割转速、所述收割角度或所述收割高度中的至少一项。
21、可选地,所述信息采集模块包括摄像头和传感器,所述传感器包括激光雷达、红外传感器或湿度传感器中的至少一项。
22、另一方面,提供了一种智能收割方法,应用于上述任一项所述的智能收割机器人,所述方法包括:
23、采集作物的关联信息,所述关联信息包括所述作物的作物信息和所述作物所处环境的环境信息;
24、基于所述关联信息,生成移动策略和收割策略;
25、控制所述智能收割机器人按照所述移动策略进行移动,按照所述收割策略对所述作物进行收割。
26、可选地,所述基于所述关联信息,生成移动策略和收割策略,包括:
27、每隔第一预设时长,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
28、可选地,所述方法还包括:
29、在按照所述移动策略进行移动的过程中,如果移动方向上存在障碍物,则生成策略更新请求;
30、响应于所述策略生成请求,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
31、可选地,所述方法还包括:
32、在按照所述移动策略进行移动的过程中,如果移动方向上存在障碍物,则停止按照所述移动策略进行移动,在停止移动的时长未达到第二预设时长时所述障碍物离开所述移动方向的情况下,继续按照所述移动策略进行移动。
33、可选地,所述方法还包括:
34、在停止移动的时长达到所述第二预设时长时所述障碍物仍未离开所述移动方向的情况下,则生成策略更新请求;
35、响应于所述策略生成请求,获取最新采集到的所述关联信息,基于最新采集到的所述关联信息,对所述移动策略和所述收割策略进行更新。
36、可选地,所述作物信息包括作物类别、作物成熟度或作物韧度中的至少一项;
37、所述环境信息包括所述作物的位置、所述作物所处环境中障碍物的位置、所述环境的湿度中的至少一项。
38、可选地,所述移动策略包括移动方向;所述基于所述关联信息,生成移动策略和收割策略,包括:
39、基于所述作物的位置和所述作物所处环境中障碍物的位置,生成所述移动方向,所述移动方向上具有所述作物且不具有所述障碍物。
40、可选地,所述基于所述关联信息,生成移动策略和收割策略,还包括:
41、基于所述作物类别和所述作物成熟度,生成所述移动方向,所述移动方向上的作物的成熟度满足收割条件;
42、基于所述环境的湿度,生成所述移动方向,所述移动方向上的湿度满足收割条件。
43、可选地,所述移动策略包括移动速度;所述基于所述关联信息,生成移动策略和收割策略,包括:
44、基于所述作物韧度,生成所述移动速度,所述移动速度与所述作物韧度负相关。
45、可选地,所述收割策略包括所述智能收割机器人的收割转速、收割角度或收割高度中的至少一项;所述基于所述关联信息,生成移动策略和收割策略,包括:
46、基于所述作物类别和所述作物的位置,生成所述收割转速、所述收割角度或所述收割高度中的至少一项。
47、另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以实现如上述方面所述的智能收割方法所执行的操作。
48、另一方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序由处理器加载并执行,以实现如上述方面所述的智能收割方法所执行的操作。
49、本技术实施例提供的方案,由智能收割机器人采集作物的作物信息以及所处环境的环境信息,根据作物信息和环境信息,自适应地生成移动策略和收割策略,进而智能收割机器人可按照该移动策略和收割策略自动移动至作物所在的位置进行收割,无需人工收割,也无需人工操控智能收割机器人,实现了全自动化收割作物,节省了人力,提高了收割效率。
本文地址:https://www.jishuxx.com/zhuanli/20240802/260428.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表