一种基于模仿学习的端到端智能车移动规划方法
- 国知局
- 2024-08-08 16:50:03
本发明涉及计算机视觉,尤其涉及一种基于模仿学习的端到端智能车移动规划方法。
背景技术:
1、随着汽车行业的不断发展,汽车已逐渐进入到普通老百姓的家里,行驶在城市公共道路上的汽车急剧增加,由于驾驶员疲劳驾驶、酒后驾驶等不规范的驾驶行为而导致的交通事故也随之增多,因此如何减少这类交通事故的发生是当前迫切需要解决的问题,而自动驾驶的出现为解决这一问题给予了新的思路。
2、自动驾驶技术的核心在于智能车的移动规划,而移动规划可以分为两大类,一是基于规则的模块化系统设计,二是基于学习的端到端移动规划。基于规则的模块化系统设计是由多个独特的模块组成,每个模块负责移动规划的单独任务,如:环境感知、路径规划、gps导航等,该方法的结构复杂、成本较高,并存在多个中间环节,每个环节上的误差都会累积到最终的结果上,从而导致最终行为决策不佳。相对模块化系统设计,基于学习的端到端移动规划方法简略了中间环节,实现从感知端到控制端的直接映射,而基于学习的端到端移动规划方法可根据有无监督学习分为基于强化学习与基于模仿学习。强化学习是一种自主学习,无需人为监督,试图通过与环境交互来自动提高自身性能,其主要瓶颈在于环境提供的奖赏具有延时性,使得系统难以推断每一步的最优决策,并且也难以人为设计出最佳的奖励函数。而模仿学习是一种有监督的学习,无需设置奖励函数,通过引入专家的指导示例,可以为每一步的决策提供直接的参考,从而能够缓解奖赏延时性问题。
3、在模仿学习的端到端自动驾驶领域,多模态的网络设计已取代传统的单模态网络而成为主流。大多的模态融合方式采用简单的基于几何融合或者利用注意力机制整合不同模态数据,基于几何融合的网络模型能够在静态的感知领域里取得高性能,但在具有高密度动态代理的复杂道路中表现不佳。而注意力机制能够很好地提取不同模态数据的低频共享信息,并相互融合,但是其未考虑到数据中的高频独特信息部分。再者,主流的模仿学习策略均使用激光雷达数据来提高模型的环境感知和距离测量能力,对于障碍物避让有很大帮助,但激光雷达经济成本高,难以将自动驾驶技术做到平民化。
4、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明的主要目的在于提供一种基于模仿学习的端到端智能车移动规划方法,旨在解决现有技术中模仿学习驾驶策略采用基于几何融合或利用注意力机制整合不同模态数据的方式,在具有高密度动态代理的复杂道路环境下决策表现不佳的问题。
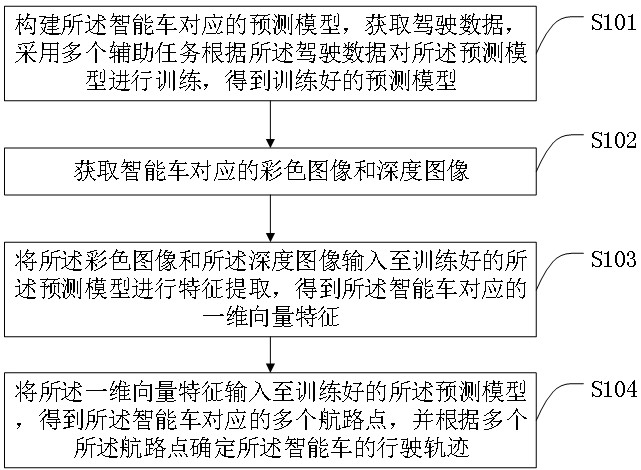
2、本技术实施例第一方面提供一种基于模仿学习的端到端智能车移动规划方法,所述基于模仿学习的端到端智能车移动规划方法包括如下步骤:构建所述智能车对应的预测模型,获取驾驶数据,采用多个辅助任务根据所述驾驶数据对所述预测模型进行训练,得到训练好的预测模型;获取智能车对应的彩色图像和深度图像;将所述彩色图像和所述深度图像输入至训练好的所述预测模型进行特征提取,得到所述智能车对应的一维向量特征;构建所述智能车对应的预测模型,获取多个辅助任务,并根据多个所述辅助任务对所述预测模型进行训练,得到训练好的预测模型;训练好的所述预测模型根据所述一维向量特征,得到所述智能车对应的多个航路点,并根据多个所述航路点确定所述智能车的行驶轨迹。
3、可选地,在本技术的一个实施例中,多个所述辅助任务包括语义分割、深度估计、车辆预测和高清地图预测,,所述驾驶数据包括智能车的训练图像和所述训练图像对应的真实航路点;所述获取驾驶数据,采用多个辅助任务根据所述驾驶数据对所述预测模型进行训练,得到训练好的预测模型,具体包括:获取训练图像、所述语义分割、所述深度估计、所述车辆预测、所述高清地图预测、所述训练图像对应的真实航路点以及多个所述辅助任务各自对应的真实标签;将所述训练图像输入至所述预测模型,得到预测航路点和多个所述辅助任务各自对应的预测数据;根据所述预测航路点、多个所述预测数据、所述真实航路点和多个所述真实标签,计算损失函数,并最小化所述损失函数,得到训练好的预测模型。
4、可选地,在本技术的一个实施例中,所述将所述彩色图像和所述深度图像输入至训练好的所述预测模型进行特征提取,得到所述智能车对应的一维向量特征,具体包括:训练好的所述预测模型分别对所述彩色图像和所述深度图像进行特征提取,得到彩色特征数据和深度特征数据;采用融合模块将所述彩色特征数据与所述深度特征数据进行特征融合,得到融合特征图;对所述融合特征图进行平坦化展开,得到所述智能车对应的一维向量特征。
5、可选地,在本技术的一个实施例中,所述融合模块包括transformer编码层和cnn编码层,所述融合模块的表达式为:
6、;;
7、;;;
8、;
9、其中,表示彩色特征数据,表示深度特征数据,和分别表示transformer编码层和cnn编码层,表示transformer编码层对彩色特征数据的输出特征,表示transformer编码层对深度特征数据的输出特征,表示cnn编码层对彩色特征数据的输出特征,表示cnn编码层对深度特征数据的输出特征,cat表示特征向量在通道上拼接;表示融合特征图。
10、可选地,在本技术的一个实施例中,训练好的所述预测模型包括多层感知机和门控循环单元,多个所述航路点包括第一航路点和下一航路点;所述训练好的所述预测模型根据所述一维向量特征,得到所述智能车对应的多个航路点,具体包括:通过所述多层感知机将所述一维向量特征降至目标维特征向量;通过所述多层感知机将所述目标维特征向量映射为第一航路点,并将所述目标维特征向量输入至所述门控循环单元得到下一特征向量,通过所述多层感知机将所述下一特征向量映射为下一航路点,直至得到所述智能车所需的所有航路点。
11、可选地,在本技术的一个实施例中,所述门控循环单元的输入数据表示为:;
12、其中,表示门控循环单元的输入值,表示智能车的当前位置,表示智能车的目标位置,concat表示向量拼接。
13、可选地,在本技术的一个实施例中,所述根据多个所述航路点确定所述智能车的行驶轨迹,之后还包括:对所述行驶轨迹进行处理,得到预测速度和预测方向角;根据所述预测速度和所述预测方向角转换为所述智能车的控制指令;控制所述智能车按照所述控制指令行驶。
14、本技术实施例第二方面还一种基于模仿学习的端到端智能车移动规划系统,其中,所述基于模仿学习的端到端智能车移动规划系统包括:
15、预测模型构建与训练模块,用于构建所述智能车对应的预测模型,获取驾驶数据,采用多个辅助任务根据所述驾驶数据对所述预测模型进行训练,得到训练好的预测模型;
16、图像获取模块,用于获取智能车对应的彩色图像和深度图像;
17、前端特征提取网络模块,用于将所述彩色图像和所述深度图像输入至训练好的所述预测模型进行特征提取,得到所述智能车对应的一维向量特征;
18、后端行为预测网络模块,用于训练好的所述预测模型根据所述一维向量特征,得到所述智能车对应的多个航路点,并根据多个所述航路点确定所述智能车的行驶轨迹。
19、本技术实施例第三方面还提供一种终端,其中,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的基于模仿学习的端到端智能车移动规划程序,所述基于模仿学习的端到端智能车移动规划程序被所述处理器执行时实现如上所述的基于模仿学习的端到端智能车移动规划方法的步骤。
20、本技术实施例第四方面还提供一种计算机可读存储介质,其中,所述计算机可读存储介质存储有基于模仿学习的端到端智能车移动规划程序,所述基于模仿学习的端到端智能车移动规划程序被处理器执行时实现如上所述的基于模仿学习的端到端智能车移动规划方法的步骤。
21、有益效果:本发明提供一种基于模仿学习的端到端智能车移动规划方法,该方法通过在网络中使用所提出的transformer-cnn融合模块用于整合彩色图像特征和深度图像特征,能够兼顾彩色图像和深度图像的高频独特信息和低频共享信息的提取与融合,并在网络训练中引入多个辅助子任务,加快网络策略的学习速度,提高了网络策略在复杂道路环境下的适应能力。
本文地址:https://www.jishuxx.com/zhuanli/20240808/270655.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表