一种拌合站物料上料管控系统及方法与流程
- 国知局
- 2024-08-08 16:51:38
本发明涉及建筑施工领域,特别是一种拌合站物料上料管控系统及方法。
背景技术:
1、目前,混凝土拌合料场的智能化管控水平比较低,在利用铲车等运输车辆在料仓取料、在配料斗倾倒的过程中,无法对物料信息进行核对。在向配料斗处倾倒物料时,由于没有相应的倾倒位置检测机制,非常容易造成物料倾倒错误,整个取料和倒料的过程基本依靠车辆驾驶人员的操作经验及现场观察,料场的作业精度和效率均比较低。混凝土搅拌站(楼)客户解决胶凝材料风送上料过程中经常出现上错灰罐、风送上料过程中不能连续查看料位,因为料位不准确造成的料上多冒灰等现象,因此现有技术有待改进。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了一种拌合站物料上料管控系统及方法。
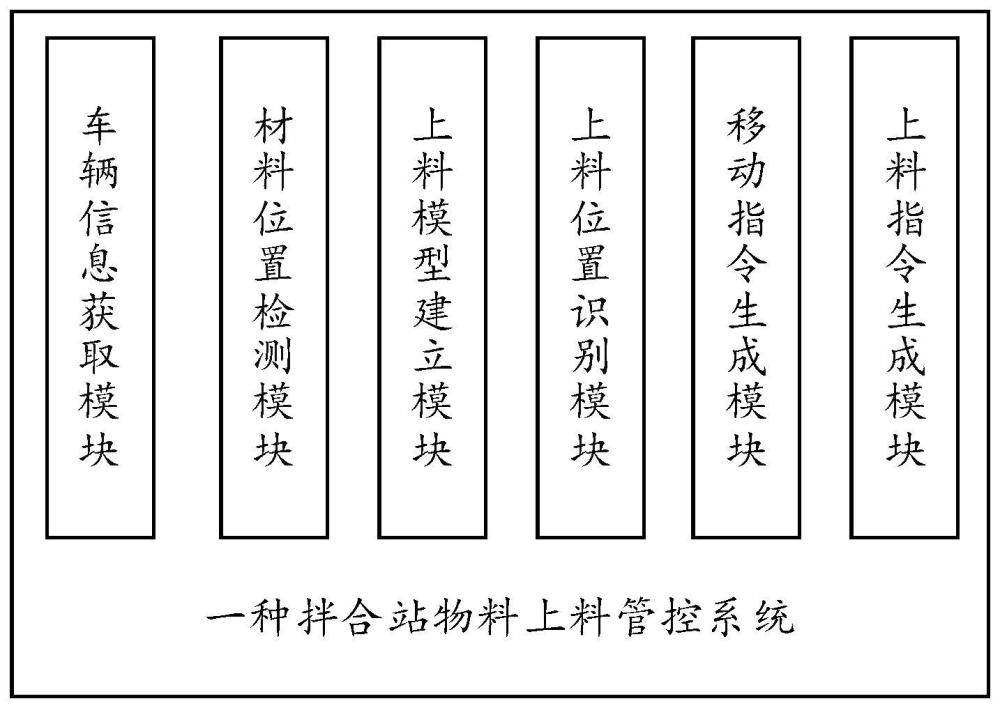
2、实现上述目的本发明的技术方案为,进一步,在上述一种拌合站物料上料管控系统中,该拌合站物料上料管控系统包括以下模块:
3、车辆信息获取模块,用于获取混凝土运输罐车的车辆运输信息,所述车辆运输信息至少包括车辆过磅重量信息和运输材料类型信息;
4、材料位置检测模块,用于基于声波传感器对拌合站中的料位进行检测,获取所述拌合站中的材料位置信息;
5、上料模型建立模块,用于通过cnn卷积神经网络建立拌合站智能上料模型,将leakyrelu激活函数替换所述拌合站智能上料模型中的relu激活函数;
6、上料位置识别模块,用于将所述车辆运输信息和材料位置信息输入至所述拌合站智能上料模型中进行训练,得到运输罐车上料位置;
7、移动指令生成模块,用于将所述运输罐车上料位置通过z i gbee无线通信技术传输至混凝土运输罐车的系统中,生成混凝土运输罐车的车辆移动指令;
8、上料指令生成模块,用于基于所述车辆移动指令对所述混凝土运输罐车进行实时控制,当所述混凝土运输罐车移动到所述运输罐车上料位置时,生成上料指令,基于所述上料指令对所述混凝土运输罐车和拌合站的仓口进行上料控制。
9、进一步,在上述一种拌合站物料上料管控系统中,所述车辆信息获取模块包括以下子模块:
10、信息获取子模块,用于获取混凝土运输罐车的车辆运输信息,所述车辆运输信息至少包括车辆过磅重量信息和运输材料类型信息;
11、重量信息子模块,用于基于拌合站中的地磅获取混凝土运输罐车的车辆过磅重量信息;
12、材料信息子模块,用于基于拌合站中的图像传感器获取混凝土运输罐车的运输材料类型信息。
13、进一步,在上述一种拌合站物料上料管控系统中,所述上料模型建立模块包括以下子模块:
14、传感器子模块,用于基于声波传感器对拌合站中的料位进行检测,所述声波传感器设置于拌合站的拌合仓四周,所述声波传感器至少包括电磁变换声波传感器、静电变换声波传感器、电阻变换声波传感器、光电变换声波传感器;
15、信息传输子模块,用于获取所述拌合站中的材料位置信息,通过z i gbee无线通信技术将所述材料位置信息传输至服务器中;
16、预警子模块,用于判断所述材料位置信息是否超过预设的预警值,若超过预警值,则停止对拌合站进行上料;所述预警值为材料位置达到拌合仓的80%刻度线。
17、进一步,在上述一种拌合站物料上料管控系统中,所述材料位置检测模块包括以下子单元:
18、模型建立单元,用于通过cnn卷积神经网络建立拌合站智能上料模型,所述拌合站智能上料模型至少包括输入层、卷积层、池化层、激活函数层、批量化归一层、全连接层、输出层;
19、激活函数单元,用于将leakyrelu激活函数替换所述拌合站智能上料模型中的relu激活函数;
20、模型训练单元,用于利用数据库中的历史车辆运输信息和历史材料位置信息输入至所述拌合站智能上料模型中进行训练。
21、进一步,在上述一种拌合站物料上料管控系统中,所述移动指令生成模块包括以下子模块:
22、指令生成子模块,用于将所述运输罐车上料位置通过z i gbee无线通信技术传输至混凝土运输罐车的系统中,生成混凝土运输罐车的车辆移动指令;
23、移动监控子模块,用于对所述混凝土运输罐车实时移动方向进行监控,若所述混凝土运输罐车移动方向符合预设的移动方向,则对所述混凝土运输罐车的驾驶人员进行预警,并生成语音信息,通知驾驶人员调整车辆的移动方向和移动位置。
24、进一步,在一种拌合站物料上料管控系统中,所述上料指令生成模块包括以下子模块:
25、实时控制子模块,用于基于所述车辆移动指令对所述混凝土运输罐车进行实时控制,当所述混凝土运输罐车移动到所述运输罐车上料位置时,生成上料指令所述上料指令至少包括倾倒指令、开启指令和关闭指令;
26、倾倒控制子模块,用于基于所述上料指令对所述混凝土运输罐车生成混凝土运输罐车的倾倒指令,利用倾倒指令对混凝土运输罐车进行倾倒控制;
27、开关控制子模块,用于基于所述上料指令对拌合站的仓口生成开启指令和关闭指令,利用开启指令和关闭指令对拌合站的仓口进行开关控制;
28、浓度控制子模块,用于通过图像采集装置获取仓口的灰尘浓度,若仓口的灰尘浓度过高,则根据所述灰尘浓度对仓口风机生成控制指令,利用控制指令对仓口风机进行控制。
29、在一种拌合站物料上料管控方法中,所述拌合站物料上料管控方法包括以下步骤:
30、获取混凝土运输罐车的车辆运输信息,所述车辆运输信息至少包括车辆过磅重量信息和运输材料类型信息;
31、基于声波传感器对拌合站中的料位进行检测,获取所述拌合站中的材料位置信息;
32、通过cnn卷积神经网络建立拌合站智能上料模型,将leakyrelu激活函数替换所述拌合站智能上料模型中的relu激活函数;
33、将所述车辆运输信息和材料位置信息输入至所述拌合站智能上料模型中进行训练,得到运输罐车上料位置;
34、将所述运输罐车上料位置通过z i gbee无线通信技术传输至混凝土运输罐车的系统中,生成混凝土运输罐车的车辆移动指令;
35、基于所述车辆移动指令对所述混凝土运输罐车进行实时控制,当所述混凝土运输罐车移动到所述运输罐车上料位置时,生成上料指令,基于所述上料指令对所述混凝土运输罐车和拌合站的仓口进行上料控制。
36、其有益效果在于,通过获取混凝土运输罐车的车辆运输信息,所述车辆运输信息至少包括车辆过磅重量信息和运输材料类型信息;基于声波传感器对拌合站中的料位进行检测,获取所述拌合站中的材料位置信息;通过cnn卷积神经网络建立拌合站智能上料模型,将leakyrelu激活函数替换所述拌合站智能上料模型中的relu激活函数;将所述车辆运输信息和材料位置信息输入至所述拌合站智能上料模型中进行训练,得到运输罐车上料位置;将所述运输罐车上料位置通过z i gbee无线通信技术传输至混凝土运输罐车的系统中,生成混凝土运输罐车的车辆移动指令;基于所述车辆移动指令对所述混凝土运输罐车进行实时控制,当所述混凝土运输罐车移动到所述运输罐车上料位置时,生成上料指令,基于所述上料指令对所述混凝土运输罐车和拌合站的仓口进行上料控制。可以智能判断是否进行环保除尘设备的启停和关闭,并可以实时进行预警和手动干预操作,来实现整个系统的高效和平滑运行。可以减轻物料管理人员的工作强度,并杜绝人为因素造成的上错灰罐造成的质量事故;智能指导司机往正确的灰罐仓位上料,及时反馈和预警因为司机操作失误造成的质量事故和环境污染。
本文地址:https://www.jishuxx.com/zhuanli/20240808/270817.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表