一种基于逻辑气路的多关节气动软体爬行机器人
- 国知局
- 2024-08-08 16:51:35
本发明涉及逻辑气路与气动仿生的,尤其是涉及一种基于逻辑气路的多关节气动软体爬行机器人。
背景技术:
1、传统的机器人以刚性结构为主,目前广泛应用在各行各业当中,并且有相当雄厚的技术积累。但是由于传统机器人主要采用刚性结构,导致其结构复杂,灵活度低,导致其往往只能应用于相比较传统的领域,部分灵活度要求高的环境,并不适合传统机器人的应用。随着近年来机器人技术的不断发展,逐渐衍生出了一类新型的机器人,软体机器人。不同于传统的硬质机器人,软体机器人通常采用软材料加工而成,驱动任务通常由柔性驱动器实现,柔性驱动器通常由可产生大变形的弹性软材料构成,可以大幅度的弯曲,扭转,变形,环境适应性高,安全性好,具有简单灵活、可连续变形、变形响应大、成本低、人机交互安全性高等优点,可在狭窄复杂的空间环境下完成搜索和救援、探测和监控等任务,能帮助人类探索更多领域,完成更多任务而备受关注;但其研究起步较晚且研究难度较大,目前在运动变形控制、负载能力增强、应用场景拓展等方面仍需进一步深入研究。
2、而在控制部分,传统机器人多以电路控制为主,尽管软设备(夹持器、执行器和基本机器人)正迅速成为机器人技术广泛领域的一个组成部分,但完全软设备的自主性才刚刚开始发展。传统的控制系统适应软设备需要硬阀门和电子控制,限制了其在软体机器人等相关领域中的应用效果。因而适用于电流(宏观)软执行器的物理尺度的完全软气动数字逻辑门,具有很好的应用前景。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于逻辑气路的多关节气动软体爬行机器人,为爬行软体仿生机器人的设计提供新的驱动方式同时对其进行模块化设计,应用气动软体阀门和摆动气腔,应用到新的仿生驱动中。将适用于电流(宏观)软执行器的物理尺度的完全软气动数字逻辑门应用于软体机器人,气动阀的软管部分为主气路,常通,被第一通气管部分的控制气路控制,当第一通气管部分通气则主气路阻断,第一通气管部分与主气路为非门逻辑关系。通过组合具有一定的灵活机动性。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明提供一种基于逻辑气路的多关节气动软体爬行机器人,包括:逻辑气路组件、驱动组件与仿生足部;
4、所述逻辑气路组件与所述驱动组件连接,所述逻辑气路组件为所述驱动组件提供动力,所述仿生足部均布固定于所述驱动组件上,所述仿生足部在驱动组件的驱动下执行爬行。
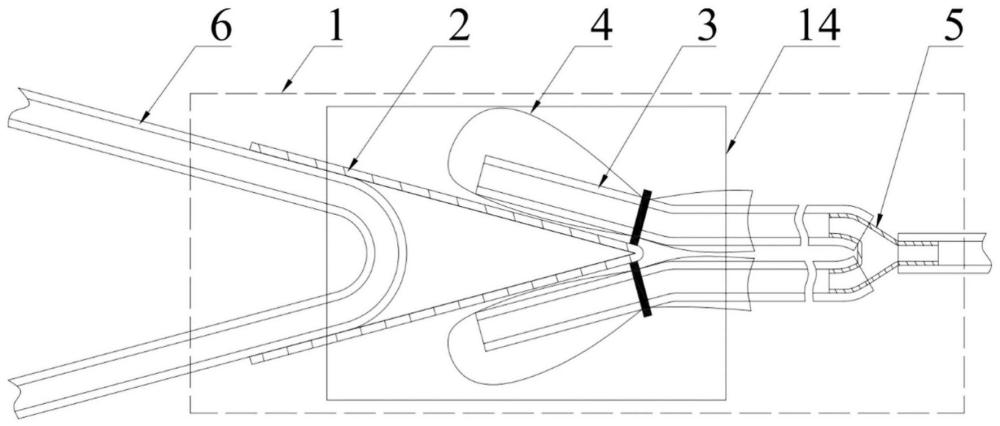
5、进一步的,逻辑气路组件包括多个柔性气动阀门,柔性气动阀门包括:弹性管、“v”形夹、第一通气管、气球、三接口分气单元、气阀外部骨架、第一可调节气泵、第二可调节气泵;
6、弹性管、“v”形夹、第一通气管、气球均设于气阀外部骨架内,三接口分气单元的两个接口分别与第一通气管的一端连接,三接口分气单元的第三个接口与第一可调节气泵连接,第一通气管的另一端与气球连接,气球设于“v”形夹的外侧。弹性管作为阀芯固定于“v”形夹的内侧,所述弹性管的一端与所述第二可调节气泵连接,弹性管承受轴向压缩。气球通过弹性橡胶圈连接于第一通气管的末端,弹性管、“v”形夹、第一通气管、气球组成控制气路部分,控制驱动组件的气腔的通断。气阀外部骨架,限制气球的膨胀范围,第一可调节气泵提供气源。当工作时,由第一通气管充气进入气球,气球膨胀轴向压缩“v”形夹,使“v”形夹内部的弹性管通气截面积收缩从而使主气路不通气。当不工作时,气球由进气口泄气,“v”形夹张开,弹性软管主气路恢复通气。
7、进一步的,驱动组件包括依次连接的第一气囊件、弹性基板、第二气囊件,所述第一气囊件、第二气囊件的一端各自固接有第二通气管,第二通气管为气囊的泄气管,第二通气管的另一头与大气相连,第二通气管的内径为0.5mm,用以控制泄气的速度。
8、进一步的,第一气囊件、第二气囊件通过热熔密封的方式形成多个密封线,每两个密封线之间形成一薄膜气腔,通过控制密封线的形状从而控制第一气囊件、第二气囊件内部充气时的形状。
9、进一步的,所述第一气囊件、第二气囊件上各自设有第三通气管,第三通气管为气囊的进气口,第三通气管与柔性气动阀门中的弹性管相接,故而一个驱动组件单元至少有两个柔性气动阀门与之相接控制。柔性气动阀门的供气控制实现第一气囊件、第二气囊件的通断气,实现驱动组件的循环运动。
10、进一步的,仿生足部包括泡沫板块和固定于泡沫板块底部的人工纤维模拟刚毛。第一气囊件、第二气囊件各固定有前后两个仿生足部,人工纤维模拟刚毛前半朝上而后半朝下,毛尖端均向后的形式,可以在气囊充气引起整体形变时向前有较小的摩擦力而向后运动有较大的摩擦阻力。
11、进一步的,第一气囊件与弹性基板之间通过双面胶粘接,第二气囊件与弹性基板之间通过双面胶粘接。第一气囊件与弹性基板之间及第二气囊件与弹性基板之间通过双面胶形成粘结层。
12、进一步的,第一气囊件与第二气囊件的均为透明tpu薄膜,弹性基板的为柔性纸。
13、进一步的,v形夹设有两层,上层为0.2mm fr4硬质板,下层为cpp材质,具有多次弯折后有记忆痕迹且不易断的特点。
14、进一步的,气球为260q的扭曲球。
15、进一步的,泡沫板块材质为epe珍珠泡沫板,形状为长方体块状。
16、进一步的,气阀外部骨架为pvc材质圆柱状空心薄壁塑料管,起到支撑内部结构作用。
17、进一步的,驱动组件的尺寸为60*26*0.3mm。
18、进一步的,第一通气管的外径od为3mm,内径id为2mm。
19、进一步的,第二通气管的外径od为1.6mm,内径id为0.5mm。
20、进一步的,第三通气管的外径od为1.6mm,内径id为1.0mm。
21、进一步的,三接口分气单元的型号为23.4x12.5,od:1.6mm。
22、与现有技术相比,本发明具有以下优点:
23、为爬行软体仿生机器人的设计提供新的驱动方式对其进行模块化设计,应用气动软体阀门和摆动气腔,应用到新的仿生驱动中。将适用于电流(宏观)软执行器的物理尺度的完全软气动数字逻辑门应用于软体机器人。具有一定的灵活机动性。
技术特征:1.一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,包括:逻辑气路组件、驱动组件与仿生足部;
2.根据权利要求1所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述逻辑气路组件包括多个柔性气动阀门(1),所述柔性气动阀门(1)包括:弹性管(6)、“v”形夹(2)、第一通气管(3)、气球(4)、三接口分气单元(5)、气阀外部骨架(14)、第一可调节气泵、第二可调节气泵;
3.根据权利要求1所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述驱动组件包括依次连接的第一气囊件(7-1)、弹性基板(8)、第二气囊件(7-2),所述第一气囊件(7-1)、第二气囊件(7-2)的一端各自固接有第二通气管(3-1),第二通气管(3-1)为气囊的泄气管,第二通气管(3-1)的另一头与大气相连,用以控制泄气的速度。
4.根据权利要求3所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述第一气囊件(7-1)、第二气囊件(7-2)通过热熔密封的方式形成多个密封线(13),每两个密封线(13)之间形成一薄膜气腔,通过控制密封线(13)的形状从而控制所述第一气囊件(7-1)、第二气囊件(7-2)内部充气时的形状。
5.根据权利要求4所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述第一气囊件(7-1)、第二气囊件(7-2)上各自设有第三通气管(3-2),第三通气管(3-2)为气囊的进气口,第三通气管(3-2)与柔性气动阀门(1)中的弹性管(6)相接。
6.根据权利要求1所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述仿生足部包括泡沫板块(10)和固定于泡沫板块(10)底部的人工纤维模拟刚毛(11)。
7.根据权利要求3所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述第一气囊件(7-1)与弹性基板(8)之间通过双面胶粘接,第二气囊件(7-2)与弹性基板(8)之间通过双面胶粘接。
8.根据权利要求3所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述第一气囊件(7-1)与第二气囊件(7-2)均采用透明tpu薄膜材料,弹性基板(8)为柔性纸。
9.根据权利要求2所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述“v”形夹(2)设有两层,上层为厚度为0.2mm的fr4耐燃等级的硬质板,下层为氯化聚丙烯树脂材质。
10.根据权利要求2所述的一种基于逻辑气路的多关节气动软体爬行机器人,其特征在于,所述气球(4)为260q的扭曲球。
技术总结本发明涉及一种基于逻辑气路的多关节气动软体爬行机器人,包括:逻辑气路组件、驱动组件与仿生足部;所述逻辑气路组件与所述驱动组件连接,所述逻辑气路组件为所述驱动组件提供动力,所述仿生足部均布固定于所述驱动组件上,所述仿生足部在驱动组件的驱动下执行爬行。与现有技术相比,本发明为爬行软体仿生机器人的设计提供新的驱动方式对其进行模块化设计,应用气动软体阀门和摆动气腔,应用到新的仿生驱动中。将适用于电流(宏观)软执行器的物理尺度的完全软气动数字逻辑门应用于软体机器人。具有一定的灵活机动性。技术研发人员:蔡乐尧,王神龙,匡语甜,王馨涵受保护的技术使用者:上海理工大学技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/270815.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表