一种双LCC型双向无线充电系统原副边相位同步方法
- 国知局
- 2024-08-08 16:56:43
本发明涉及电动汽车无线充电领域,具体涉及一种双lcc型双向无线充电系统原副边相位同步方法。
背景技术:
1、近年来,随着电动汽车的发展,无线充电技术由于其安全性和便利性的优点,得到广泛关注。双向无线充电系统在进行能量传输时,原副边输出交流电压的相位差影响系统传输功率的方向,且传输功率的大小也可以通过控制相位差进行调节,因此,为了实现对双向无线充电系统传输功率方向及大小的控制,必须实现对原副边相位的同步控制。
2、文献“a new controller for bidirectional wireless power transfersystems”.[《ieee transactions on power electronics》2018,33(10):9076-9087](“一种新的双向无线电力传输系统控制器”2018年第33卷第10期9076-9087页)基于双lcc型谐振补偿网络,对副边交流侧有功功率和无功功率进行测量,引入新的参数功率角代替原副边相位差,通过调节该角度使输出无功功率为零,进而确定原副边相位差大小。该方法的模拟处理电路较为复杂,增加了双向无线充电系统的成本及复杂性。
3、文献“电动汽车双向无线电能传输系统的控制技术研究”[d].华中科技大学,2020.基于ss型谐振补偿网络的输出特性,通过副边输出电压与电流的相位关系推导出原副边电压相位关系,进而实现相位的同步。双lcc型谐振补偿网络输出电流谐波含量丰富,通过输出电压电流相位关系进行相位同步会存在较大偏差。
4、文献“双lcc型无线电能传输系统的建模与控制技术”[d].华中科技大学,2022.采用pi控制的数字锁相环实时根据副边谐振电流的过零点改变整流桥臂开关管的驱动相位,从而实现原副边的相位同步。该方法操作复杂,成本较高。
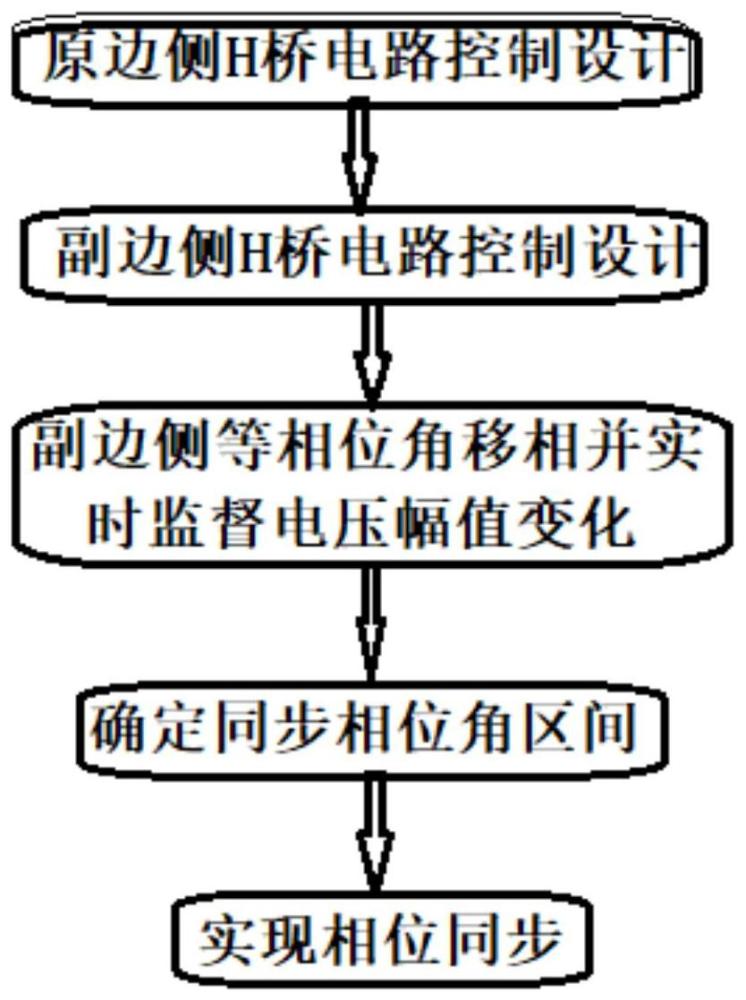
5、综上所述,现有技术还存在以下问题:
6、1、通过有功功率和无功功率确定原副边相位差,设计电路复杂,所需成本较高;
7、2、双lcc型谐振补偿网络输出电流含有谐波,运用输出特性确定原副边电压相位关系会存在较大误差;
8、3、pi控制的数字锁相环操作复杂,额外的辅助硬件让系统体积增加。
技术实现思路
1、本发明的目的是提供一种双lcc型双向无线充电系统原副边相位同步方法,解决以上现有技术中存在的问题,实现原副边相位同步,进而为无线充电系统的优化运行奠定基础。
2、本发明的目的是这样实现的,本发明提供了一种双lcc型双向无线充电系统原副边相位同步方法,所述双lcc型双向无线充电系统包括原边侧直流电源u*i、副边侧直流电源u*。和双向无线充电模块;所述双向无线充电模块包括原边侧滤波电容c10、原边侧h桥电路、原边侧补偿网络、原边侧发射线圈l*1、副边侧接受线圈l*2、副边侧补偿网络、副边侧h桥电路、副边侧滤波电容c20;所述原边侧滤波电容c10与原边侧直流电源u*i的正负母线并联,所述副边侧滤波电容c20与副边侧直流电源u*。的正负母线并联;
3、所述原边侧h桥电路包括4个带反向并联二极管的开关管,分别记为开关管s*p1、开关管s*p2、开关管s*p3和开关管s*p4,其中,开关管s*p1的发射极和开关管s*p2的集电极串联组成原边侧第一桥臂,且开关管s*p1的发射极和开关管s*p2的集电极的接点记为原边侧第一桥臂中点a,开关管s*p3的发射极和开关管s*p4的集电极串联组成原边侧第二桥臂,且开关管s*p3的发射极和开关管s*p4的集电极的接点记为原边侧第二桥臂中点b;所述原边侧第一桥臂、原边侧第二桥臂并联在原边侧直流电源u*1的正负直流母线之间;
4、所述原边侧补偿网络包括原边侧谐振电感l*f1、原边侧谐振电容c*f1和原边侧补偿电容c*1;原边侧谐振电感l*f1的一端与原边侧第一桥臂中点a连接,另一端串联原边侧补偿电容c*1后与原边侧发射线圈l*1的一端连接,原边侧发射线圈l*1的另一端与原边侧第二桥臂中点b连接;原边侧谐振电容c*f1的一端接入原边侧谐振电感l*f1和原边侧补偿电容c*1之间、另一端与原边侧第二桥臂中点b连接;
5、所述副边侧h桥电路包括4个带反向并联二极管的开关管,分别记为开关管s*s1、开关管s*s2、开关管s*s3和开关管s*s4,其中,开关管s*s1的发射极和开关管s*s2的集电极串联组成副边侧第一桥臂,且开关管s*s1的发射极和开关管s*s2的集电极的接点记为副边侧第一桥臂中点a,开关管s*s3的发射极和开关管s*s4的集电极串联组成副边侧第二桥臂,且开关管s*s3的发射极和开关管s*s4的集电极的接点记为副边侧第二桥臂中点b;所述副边侧第一桥臂、副边侧第二桥臂并联在副边侧直流电源u*o的正负直流母线之间;
6、所述副边侧补偿网络包括副边侧谐振电感l*f2、副边侧谐振电容c*f2和副边侧补偿电容c*2;副边侧谐振电感l*f2的一端与副边侧第一桥臂中点a连接,另一端串联一个副边侧补偿电容c*2后与副边侧接受线圈l*2的一端连接,副边侧接受线圈l*2的另一端与副边侧第二桥臂中点b连接;副边侧谐振电容c*f2的一端接入副边侧谐振电感l*f2和副边侧补偿电容c*2之间、另一端与副边侧第二桥臂中点b连接;
7、副边侧接受线圈l*2通过互感m*接收原边侧发射线圈l*1发射的电磁场,并转化为电能;
8、将双lcc型双向无线充电系统记为系统,设定系统中所有开关管频率f均相同,并记系统运行角频率为ω,ω=2πf;所述相位同步方法包括以下步骤:
9、步骤1,原边侧h桥电路控制设计
10、将开关管s*p1、开关管s*p2、开关管s*p3和开关管s*p4的驱动信号分别记为驱动信号qp1、驱动信号qp2、驱动信号qp3和驱动信号qp4,四个驱动信号占空比均为1/2,其中,驱动信号qp1和qp4之间的时间差为0,驱动信号qp2滞后于驱动信号qp1、驱动信号qp3滞后于驱动信号qp4,滞后时间均为1/2f;
11、步骤2,副边侧h桥电路控制设计
12、将开关管s*s1、开关管s*s2、开关管s*s3和开关管s*s4的驱动信号分别记为驱动信号qs1、驱动信号qs2、驱动信号qs3和驱动信号qs4,四个驱动信号占空比均为1/2,其中,驱动信号qs1和qs4之间的时间差为0,驱动信号qs2滞后于驱动信号qs1、驱动信号qs3滞后于驱动信号qs4,滞后时间均为1/2f;
13、步骤3,副边侧移相控制以实现相位同步
14、原边侧定位,副边侧以相位角差c为单位相对原边侧进行等相位角滞后移相,并实时监测副边侧谐振电容c*f2两端电压幅值的变化,记第i-1次移相后得到的副边侧谐振电容c*f2两端电压幅值为幅值ui-1,第i次移相后得到的副边侧谐振电容c*f2两端电压幅值为幅值ui,i为移相的次数,i为正整数;
15、记满足相位同步时副边侧谐振电容c*f2两端电压幅值为同步电压幅值ucf2,当ui-1、ui满足(ui-1-ucf2)×(ui-ucf2)<0时停止移相,并认定满足相位同步的相位角在第i-1次移相和第i次移相之间的相位角区间内,其中当时,此时无线充电系统反向传输,当时,此时无线充电系统正向传输。在此区间内采用二分法逼近ucf2,实现相位同步。
16、优选地,步骤3所述同步电压幅值ucf2的表达式为:
17、
18、其中,u1dc为原边侧直流电源u*i的母线总电压,u2dc为副边侧直流电源u*。的母线总电压,lf1为原边侧谐振电感l*f1的电感值,m为互感m*的互感值。
19、优选地,步骤3所述相位角差c为4°-7°。
20、与现有技术相比,本发明的有益效果体现在:
21、1、本发明不通过有功功率和无功功率确定原副边相位差,电路设计不复杂;
22、2、本发明无需考虑从双lcc的输出特性确定原副边电压相位关系时谐波造成的误差影响;
23、3、本发明利用副边侧谐振电容c*f2两端电压幅值ucf2与相位角的关系,实现原副边相位的同步,操作简单易行。
本文地址:https://www.jishuxx.com/zhuanli/20240808/271361.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表