清洁机器人的制作方法
- 国知局
- 2024-08-08 17:17:46
本技术涉及清洁设备,特别涉及一种清洁机器人。
背景技术:
1、清洁机器人属于清洁设备中的一种智能家用电器,清洁机器人能够凭借一定的人工智能,在不同的环境中进行导航、规划、避障、扫地、吸尘等地面清理工作,为人们的生活带来便利和舒适。清洁机器人一般采用刷扫和真空吸入的方式,在工作过程中先通过中扫毛刷清洁件清扫地面污物,再通过刮板将地面污物收集,同时通过真空吸入的方式将地面污物吸纳进入自身的垃圾收纳盒内,从而完成地面清理的功能。但是现有技术中,刮板往往是固定于刮板支架上的,在清洁过程中以固定的状态对地面进行清洁,刮板无法上下浮动。由于刮板是软胶件,在清洁机器人倒退的过程中,刮板与地面之间会产生较大的对地压力导致刮板外翻,因此出现将清洁机器人顶起不能正常行驶的故障情况。
技术实现思路
1、本实用新型实施例提供一种清洁机器人,能够吸收清洁机器人在倒退的过程中第一清洁件与地面之间过大的作用力,避免出现清洁机器人倒退时,由于第一清洁件与地面之间作用力较大,而导致的第一清洁件将清洁机器人顶起不能正常行驶的故障情况。
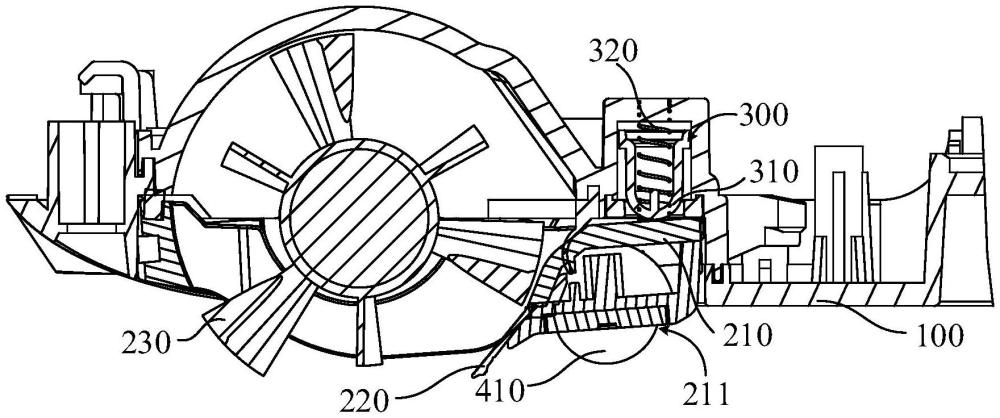
2、本实用新型实施例提供一种清洁机器人,清洁机器人包括:底盘、清洁组件以及浮动结构。清洁组件包括清洁支架和第一清洁件,清洁支架与底盘连接,第一清洁件与清洁支架连接,第一清洁件能够清洁地面,底盘包括第一凹口。浮动结构包括连接杆和弹性件,连接杆与清洁支架连接,弹性件一端与连接杆连接,另一端设置于第一凹口,在弹性件的弹性作用下,连接杆能够带动清洁支架移动使得第一清洁件与地面抵接或分离。
3、本实用新型技术方案通过在清洁机器人中设置浮动结构,浮动结构包括连接杆和弹性件,连接杆与清洁支架连接,在清洁机器人倒退的过程中,浮动结构中的弹性件能够吸收第一清洁件与地面之间产生的较大对地压力,避免出现导致刮板外翻,导致的将清洁机器人顶起不能正常行驶的故障情况。
4、根据本实用新型的前述实施方式,清洁支架包括第二凹口。清洁机器人还包括:第一行走组件。第一行走组件设置于第二凹口并能够带动清洁机器人移动,第一行走组件位于浮动结构远离第一清洁件的一侧,第一行走组件包括第一行走轮,第一行走轮通过球铰式设置于第二凹口,第一行走轮在第二凹口内能够在任意方向上旋转。本实用新型技术方案通过将第一行走轮以球铰式的方式设置于第二凹口,第一行走轮在第二凹口内能够在任意方向上旋转,使得第一行走轮为万向轮形式,具有360°的旋转自由度,使得清洁机器人在清洁移动的过程中不管是直线行走还是拐弯移动,第一行走轮都不会硬摩擦地面,避免第一行走轮在移动过程中的表面造成磨损,并且通过球铰式的连接方式将第一行走轮设置于第二凹口内,有利于提升安装便捷性并且有利于降低制造成本。第一行走轮设置于清洁组件后侧剩余空间内,有利于减少第一行走轮占用空间。
5、根据本实用新型的前述实施方式,第一行走组件还包括:限位板。限位板设置于第二凹口,限位板将第一行走轮限位于第二凹口。本实用新型技术方案通过限位板将第一行走轮限位于第二凹口,避免第一行走轮从第二凹口处掉落,第一行走轮在第二凹口内能够在任意方向上旋转,使得第一行走轮为万向轮形式,具有360°的旋转自由度,使得清洁机器人在清洁移动的过程中不管是直线行走还是拐弯移动,第一行走轮都不会硬摩擦地面,避免第一行走轮在移动过程中的表面造成磨损,并且通过球铰式的连接方式将第一行走轮设置于第二凹口内,有利于提升安装便捷性并且有利于降低制造成本。
6、根据本实用新型的前述实施方式,第一行走轮表面设置防滑纹理。本实用新型技术方案通过在第一行走轮表面设置防滑纹理,避免第一行走轮在运动过程中打滑,提高第一行走轮行走的平稳性。
7、根据本实用新型的前述实施方式,第一清洁件包括软胶件。
8、根据本实用新型的前述实施方式,弹性件包括弹簧、橡胶。本实用新型技术方案中弹性件包括弹簧、橡胶,在清洁机器人倒退的过程中,弹性件的弹性作用力能够吸收第一清洁件与地面之间产生的较大对地压力,避免出现导致刮板外翻,导致的将清洁机器人顶起不能正常行驶的故障情况。
9、根据本实用新型的前述实施方式,连接杆包括:第一部分以及第二部分。第一部分与第二部分同轴连接,弹性件穿过第一部分与第二部分连接,第二部分朝向清洁支架的一端设置球面结构,球面结构与清洁支架连接。本实用新型技术方案中将第二部分朝向清洁支架的一端设置为球面结构,使得清洁支架与连接杆的第二部分能够更好地接触,并且有利于降低清洁支架和第二部分之间产生的运动摩擦,同时有利于第一清洁件更好地接触地面。
10、根据本实用新型的前述实施方式,弹性件处于预设状态下,使得第二部分带动清洁支架朝向靠近地面一端运动,清洁支架带动第一清洁件移动使得第一清洁件与地面抵接。弹性件收缩使得第二部分带动清洁支架朝向远离地面一端运动,清洁支架带动第一清洁件移动使得第一清洁件与地面分离。
11、根据本实用新型的前述实施方式,清洁组件还包括:第二清洁件。第二清洁件与清洁支架连接,并位于第一清洁件远离第一行走轮的一侧,第二清洁件能够清洁地面。
12、根据本实用新型的前述实施方式,第一清洁件朝向地面一侧设置凹槽,凹槽用于收集第二清洁件清洁的污物。
技术特征:1.一种清洁机器人,其特征在于,所述清洁机器人包括:
2.如权利要求1所述的清洁机器人,其特征在于,所述清洁支架包括第二凹口,所述清洁机器人还包括:
3.如权利要求2所述的清洁机器人,其特征在于,所述第一行走组件还包括:
4.如权利要求2所述的清洁机器人,其特征在于,所述第一行走轮表面设置防滑纹理。
5.如权利要求1所述的清洁机器人,其特征在于,所述第一清洁件包括软胶件。
6.如权利要求5所述的清洁机器人,其特征在于,所述弹性件包括弹簧、橡胶。
7.如权利要求5所述的清洁机器人,其特征在于,所述连接杆包括:
8.如权利要求7所述的清洁机器人,其特征在于,所述弹性件处于预设状态下,使得所述第二部分带动所述清洁支架朝向靠近地面一端运动,所述清洁支架带动所述第一清洁件移动使得所述第一清洁件与地面抵接;所述弹性件收缩使得所述第二部分带动清洁支架朝向远离地面一端运动,所述清洁支架带动所述第一清洁件移动使得所述第一清洁件与地面分离。
9.如权利要求2所述的清洁机器人,其特征在于,所述清洁组件还包括:
10.如权利要求9所述的清洁机器人,其特征在于,所述第一清洁件朝向地面一侧设置凹槽,所述凹槽用于收集所述第二清洁件清洁的污物。
技术总结本技术公开一种清洁机器人,清洁机器人包括:底盘、清洁组件以及浮动结构。底盘包括第一凹口。清洁组件包括清洁支架和第一清洁件,清洁支架与底盘连接,第一清洁件与清洁支架连接,第一清洁件能够清洁地面。浮动结构包括连接杆和弹性件,连接杆与清洁支架连接,弹性件一端与连接杆连接,另一端设置于第一凹口,在弹性件的弹性作用下,连接杆能够带动清洁支架移动使得第一清洁件与地面抵接或分离。本技术技术方案能够吸收清洁机器人在倒退的过程中第一清洁件与地面之间过大的作用力,避免出现清洁机器人倒退时,由于第一清洁件与地面之间作用力较大,而导致的第一清洁件将清洁机器人顶起不能正常行驶的故障情况。技术研发人员:康业伟,叶力荣受保护的技术使用者:深圳银星智能集团股份有限公司技术研发日:20231130技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/273527.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表