一种医用机器人工作边界和跟踪帧率检测辅助工具的制作方法
- 国知局
- 2024-08-08 17:23:22
本技术属于医用机器人检测,具体涉及一种医用机器人工作边界和跟踪帧率检测辅助工具。
背景技术:
1、随着科技的不断发展,机器人越来越广泛的应用在各个领域,其中医用机器人是近年来发展较为快速的领域之一。医用机器人能够辅助医生完成一系列治疗工作,如手术、康复等,不仅提高了手术的精度和成功率,还降低了医疗事故的发生率。目前在医用机器人产品构建中离不开导航技术,导航技术中应用最多的技术为视觉,如光学跟踪相机。为了实时跟踪目标,实现精准操作,光学跟踪相机除了较高的精度外还必须具有较高的跟踪采样频率和工作视野,确保临床应用过程不会出现跟踪丢失无法导航的情况。
2、随着科技的不断发展,机器人越来越广泛的应用在各个领域,其中医用机器人是近年来发展较为快速的领域之一。医用机器人能够辅助医生完成一系列治疗工作,如手术、康复等,不仅提高了手术的精度和成功率,还降低了医疗事故的发生率。目前在医用机器人产品构建中离不开导航技术,导航技术中应用最多的技术为视觉,如光学跟踪相机。为了实时跟踪目标,实现精准操作,光学跟踪相机除了较高的精度外还必须具有较高的采样频率和视野范围,确保临床应用过程不会出现跟踪丢失无法导航的情况。
3、目前,在医用机器人领域,对光学跟踪相机的采样频率和视野范围进行检测的主要方法有两种:一是采用传统通用量依托人工操作;二是通过价格高昂的六轴协作机械臂进行自动化测试。然而,前者效率较低,准确性不足,且人员工作强度大;后者作为辅助工装,利用率不高,产品普适性较差,且成本高昂。
技术实现思路
1、本实用新型提供了一种医用机器人工作边界和跟踪帧率检测辅助工具,旨在解决现有技术中医用机器人中工作边界和跟踪帧率检测效率低的问题。
2、为了解决上述技术问题,本实用新型所采用的技术方案为:
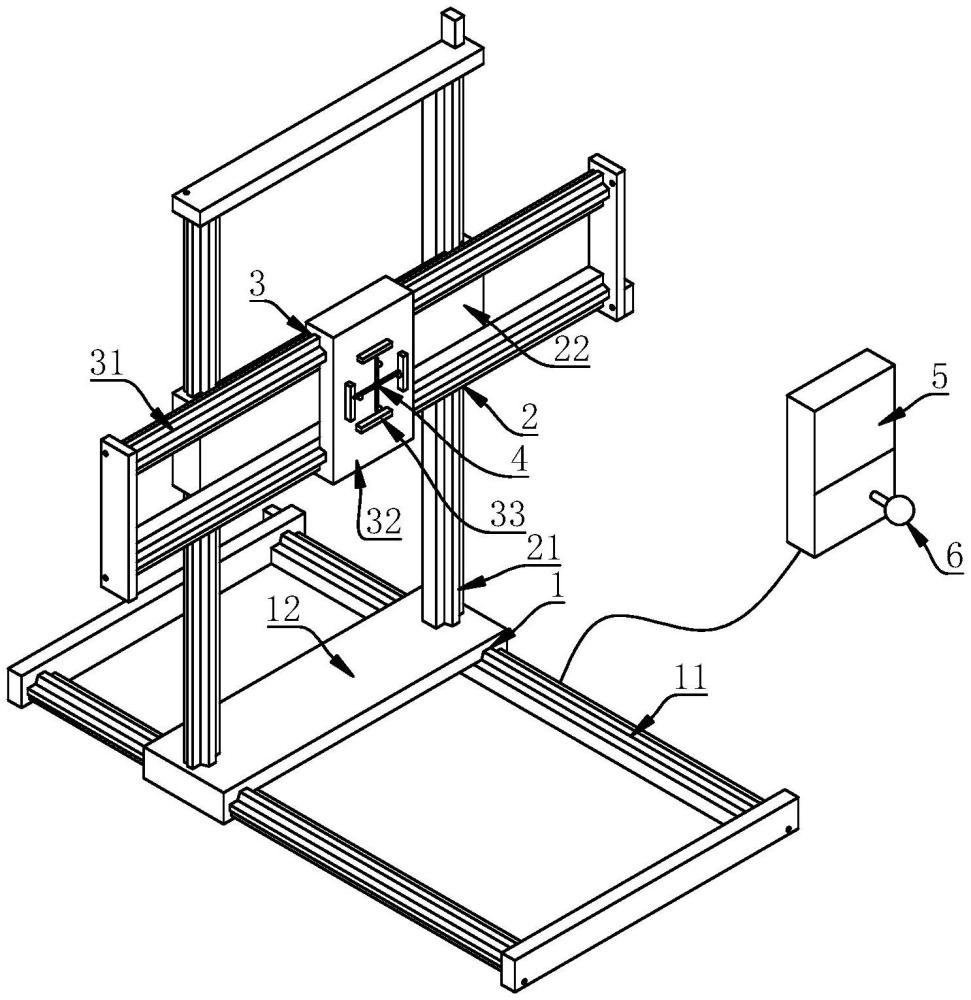
3、一种医用机器人工作边界和跟踪帧率检测辅助工具,包括前后位移组件、上下位移组件、左右位移组件、数据显示和控制面板、操控杆以及固定器。
4、进一步改进的方案:所述前后位移组件包括前后位移导轨和沿所述前后位移导轨滑动的第一滑座,所述上下位移组件设置于所述第一滑座上,所述前后位移组件还包括驱动所述第一滑座位移的第一丝杠和驱动所述第一丝杠旋转的第一伺服电机,所述第一滑座上设置有与所述第一丝杠配合的第一螺孔;所述上下位移组件包括上下位移导轨和沿所述上下位移导轨滑动的第二滑座,所述上下位移导轨的下端固定于所述第一滑座上,所述上下位移组件还包括驱动所述第二滑座位移的第二丝杠和驱动所述第二丝杠旋转的第二伺服电机,所述第二滑座上设置有与所述第二丝杠配合的第二螺孔;所述左右位移组件包括左右位移导轨和沿所述左右位移导轨滑动的第三滑座,所述左右位移导轨固定于所述第二滑座上,所述第三滑座上设置有固定参照物的固定器,所述参照物为医用机器人配套可识别的光学定位器,所述左右位移组件包括驱动所述第三滑座位移的第三丝杠和驱动所述第三丝杠旋转的第三伺服电机,所述第三滑座上设置有与所述第三丝杠配合的第三螺孔。
5、基于上述技术方案:前后位移组件包括第一伺服电机,上下位移组件包括第二伺服电机,左右位移组件包括第三伺服电机,前后位移组件、上下位移组件和左右位移组件位移精度高。
6、进一步改进的方案:所述数据显示和控制面板功能不少于:第一滑座、第二滑座和第三滑座的起始位置点显示功能,运行距离显示和设置功能、复位功能、归零功能、启动功能、停止功能、速度选择功能、往复运动选择功能、时间设置功能。
7、基于上述技术方案:数据显示和控制面板功能多易于操作。
8、进一步改进的方案:所述操控杆控制功能不少于:前、后、左、右、向上、向下、停止。
9、基于上述技术方案:操控杆控制功能不少于:前、后、左、右、向上、向下、停止,操控杆功能多样。
10、进一步改进的方案:所述第三滑座运行速度不低于1300mm/秒。
11、基于上述技术方案:第三滑座运行速度不低于1300mm/秒,第三滑座运行速度快。
12、进一步改进的方案:所述前后位移导轨长度不少于3000mm;上下位移导轨长度不少于2000mm,左右位移导轨长度不少于2000mm。
13、基于上述技术方案:加宽了一种医用机器人工作边界和跟踪帧率检测辅助工具的检测范围。
14、进一步改进的方案:所述速度选择功能至少可以达到60次/秒。
15、基于上述技术方案:提高了一种医用机器人工作边界和跟踪帧率检测辅助工具的检测效率。
16、进一步改进的方案:所述运行距离最小至少可以到达20mm。
17、基于上述技术方案:进一步提高了一种医用机器人工作边界和跟踪帧率检测辅助工具的检测效率。
18、本实用新型的有益效果为:
19、一种医用机器人工作边界和跟踪帧率检测辅助工具,包括前后位移组件、上下位移组件、左右位移组件、数据显示和控制面板、操控杆以及固定器;检测医用机器人工作边界时,仅需要将配套可识别参照物放置在固定器位置处,再通过设备操控杆控制电机带动配套可识别参照物运动到工作边界位置,读取数据显示和控制面板上数据,即可方便地检测医用机器人工作边界;检测跟踪频率时,仅需要将配套可识别参照物放置在固定器位置处,再通过数据显示和控制面板改变和启动第三滑座电动机运行速度达到跟踪帧率要求,观察运行过程中跟踪情况,即可方便地检测医用机器人跟踪频率。
技术特征:1.一种医用机器人工作边界和跟踪帧率检测辅助工具,其特征在于,包括前后位移组件、上下位移组件、左右位移组件、数据显示和控制面板、操控杆以及固定器;
2.根据权利要求1所述的一种医用机器人工作边界和跟踪帧率检测辅助工具,其特征在于,所述数据显示和控制面板功能不少于:第一滑座、第二滑座和第三滑座的起始位置点显示功能,运行距离显示和设置功能、复位功能、归零功能、启动功能、停止功能、速度选择功能、往复运动选择功能、时间设置功能。
3.根据权利要求1所述的一种医用机器人工作边界和跟踪帧率检测辅助工具,其特征在于,所述操控杆控制功能不少于:前、后、左、右、向上、向下、停止。
4.根据权利要求1所述的一种医用机器人工作边界和跟踪帧率检测辅助工具,其特征在于,所述第三滑座运行速度不低于1300mm/秒。
5.根据权利要求1所述的一种医用机器人工作边界和跟踪帧率检测辅助工具,其特征在于,所述前后位移导轨长度不少于3000mm;上下位移导轨长度不少于2000mm,左右位移导轨长度不少于2000mm。
技术总结本技术涉及一种医用机器人工作边界和跟踪帧率检测辅助工具,旨在解决现有技术中医用机器人中工作边界和跟踪帧率检测效率低的问题。一种医用机器人工作边界和跟踪帧率检测辅助工具,检测医用机器人工作边界时,仅需要将配套可识别参照物放置在固定器位置处,再通过设备操控杆控制电机带动配套可识别参照物运动到工作边界位置,读取数据显示和控制面板上数据,即可方便地检测医用机器人工作边界;检测跟踪频率时,仅需要将配套可识别参照物放置在固定器位置处,再通过数据显示和控制面板改变和启动第三滑座电动机运行速度达到跟踪帧率要求,观察运行过程中跟踪情况,即可方便地检测医用机器人跟踪频率。技术研发人员:陈维,郑建,黄丹,吴夷,孙正捷,陈落根受保护的技术使用者:浙江省医疗器械检验研究院(国家食品药品监督管理局杭州医疗器械质量监督检验中心)技术研发日:20231219技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/273954.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表