双馈型风电机组故障电流解析及其参数的优化方法及系统与流程
- 国知局
- 2024-08-19 14:19:11
本发明属于电力,具体涉及一种双馈型风力发电机故障电流解析方法。
背景技术:
1、双馈风机具有对变换器容量要求较低、整体造价低的优点,在电力系统中得到广泛应用。双馈型风电机组的定子直接并网,通过励磁变换器来控制转子电流,间接调节定子侧的输出功率,不能有效隔离风电机组与电网间的联系,因此其对电网故障非常敏感;且其在故障情况下,小功率励磁变换器对整个机组的控制能力也受到限制,导致dfig的故障穿越能力较低。在此情况下,研究正确表征双馈型风电机组的故障电流解析及其参数优化方法,对确保电力系统的稳定性和可靠性具有重要的意义。
2、针对风电机组故障电流解析,研究人员已有多种解决方案,例如:
3、1、王增平等人发表的“规模化风电场的故障特性对保护影响研究”电测与仪表,2018,55(4):9-13,22。该文章针对继电保护分析,分别在定转子参考系中建立机侧变流器(rsc)和网侧变流器(gsc)的数学模型,依此简单快速地迭代计算出变流器输出的故障电流。通过仿真对比,证实文章的结论的正确性,但该方法是针对继电保护进行的理论推导,其得到的故障电流计算表达式与控制参数脱节,无法反映真实参数和故障电流解析式的准确关系。
4、2、张艺博等人发表的“基于灵敏度分析的双馈电机短路电流简化计算”电网与清洁能源,2017,33(5):6-12。该文章在考虑了电机各参数灵敏度分析的基础上,推到了crowbar投入情况下三相短路电流最大值的计算公式。但该方法是基于多元线性回归得到的短路电流的解析表达式,仅考虑部分参数的影响,误差较大,仅可得到近似的表达式。
5、3、甘俊文等人发表的“基于机端电压跌落深度的双馈风机自适应短路电流计算方法”电力科学与技术学报,2018,33(3):3-9。该文章分析了crowbar投入与不投入两种情况下双馈风电机组的定子电流特性,推导得到了适用于双馈风机的短路电流自适应计算方法。该方法未能考虑crowbar动作延迟性以及忽略了转子电流对定子电流的作用,具有一定的局限性。
6、综上,在实用计算中,现有工作没有考虑crowbar动作延迟性以及控制策略的影响,而且普遍忽略转子电流对定子短路电流的作用,以及gsc对短路电流的贡献。为此,需要一种兼具准确性与实用性的双馈型风电机组故障电流解析式及其参数的优化方法。
技术实现思路
1、本发明的目的是为了解决现有的双馈风电机组双馈风机故障电流解析式与双馈风机控制器的控制影响因素不足、双馈风机故障电流解析式实用性较差的问题,以及没有考虑相应参数优化导致的解析表达式准确性不足的问题。
2、双馈型风电机组故障电流解析及其参数的优化方法,双馈型风电机组采用两个背靠背、通过直流环节连接的变流器进行交流励磁;将网侧变流器控制器简记为gsc;将机侧变流器控制器简记为rsc;所述方法包括基于rsc、gsc及crowbar保护的作用获取故障数据的步骤和对双馈型风电机组的故障电流进行解析和参数优化的步骤;
3、基于rsc、gsc及crowbar保护的作用获取故障数据的步骤包括:
4、将转子电压和转子电流的指令值记为ur,ref和ir,ref,构建rsc影响的定子短路电流,其中转子电流指令值的d、q轴分量记为irq,ref、ird,ref;将gsc电压、电流的d、q轴分量的指令值记为ugd,ref,ugq,ref和igd,ref,igq,ref,构建电网故障时的gsc输出电流;
5、针对发生低电压故障的情况确定故障期间对应的无功电流irql和有功电流irdl,以及低电压故障切除后恢复的有功电流irdre;irql、irdl对应故障期间的irq,ref、ird,ref,irdre对应故障切除后恢复期间的ird,ref;针对发生高电压故障的情况确定故障期间对应的无功电流irqh,irqh对应故障期间的irq,ref;故障期间有功功率在保持稳态时的控制逻辑;
6、参数中的角标r用于表示转子侧对应的参数,也就是机侧对应的参数;参数中的角标re用于表示恢复过程对应的参数;参数中的角标ref用于表示对应参数为相应的指令值参考值,也就是对应参数的参考值;
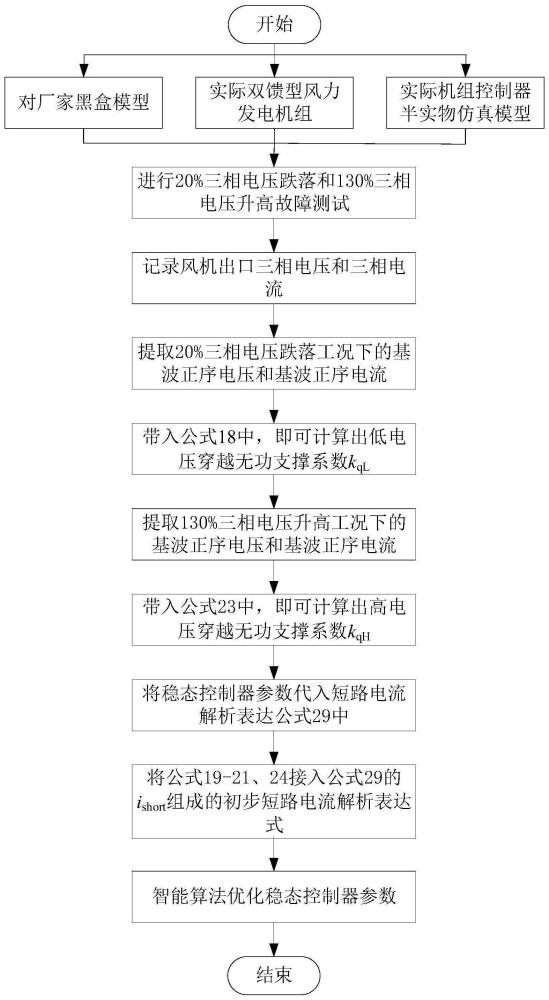
7、对双馈型风电机组的故障电流进行解析和参数优化的步骤包括:
8、s1、进行电压跌落和/或电压升高故障测试,记录风机出口三相电压和三相电流;
9、s2、故障穿越控制器参数确定:
10、基于风机出口三相电压和三相电流,提取电压跌落工况下的基波正序电压和基波正序无功电流,将基波正序无功电流对应为irql,进而得到低电压穿越无功支撑系数kql;提取电压跌落工况下故障功率恢复过程中变化的有功功率,确定对应的有功功率恢复速率kid1和kid2;或者,提取电压升高工况下的基波正序电压和基波正序无功电流,将基波正序无功电流对应为irqh,进而得到高电压穿越无功支撑系数kqh;
11、s3、将pi控制器参数带入双馈风机故障电流解析式并解析电流:
12、首先将kpr、kir、kp_p、ki_p、kpv、kiv、kpg、kig代入双馈风机故障电流解析式;其中,kpr和kir为rsc电流内环pi控制环节的比例积分系数;kp_p和ki_p为rsc有功功率外环控制器的比例积分系数;kpv和kiv为gsc电压外环控制环节的比例积分系数,kpg和kig为gsc电流内环控制环节的比例积分系数;
13、假设故障发生时刻为t1,crowbar动作时刻为t2;
14、当crowbar未动作时,即t1≤t≤t2,若发生低电压故障穿越,将s2步骤中确定的故障穿越控制器参数带入故障穿越控制器模型得到故障期间对应的有功电流irdl和无功电流irql,以及低电压故障切除后的恢复的有功电流irdre,irql、irdl对应故障期间的irq,ref、ird,ref,irdre对应故障切除后恢复期间的ird,ref,分别接入双馈风机故障电流解析式中的机侧电流指令值ir,ref得到低电压故障对应的双馈风机故障电流解析式并解析电流;
15、当crowbar未动作时,即t1≤t≤t2,若发生高电压故障穿越,将s2步骤中确定的故障穿越控制器参数带入故障穿越控制器模型中,得到故障期间的irqh,将irqh接入双馈风机故障电流解析式中的irq,ref;故障期间有功功率在保持稳态时的控制逻辑;将对应的有功电流与无功电流代入双馈风机故障电流解析式中的机侧电流指令值ir,ref得到高电压故障对应的双馈风机故障电流解析式并解析电流;
16、在crowbar未动作的故障穿越期间,代入双馈风机故障电流解析式中的ir,ref具体数值由实际故障穿越所处的具体阶段实际确定;
17、当crowbar动作后,即t>t2,crowbar电阻将转子绕组短路,使dfig作为笼型异步发电机继续运行;此时,将对应的控制器参数及稳态运行数据代入双馈风机故障电流解析式,组成crowbar动作后的双馈风机故障电流解析式并解析电流;
18、s4、在三相电压跌落或升高工况下,将三相电流和三相电压变换为dq轴直流量,设定目标函数其中ai为实测短路电流数据,bi为故障电流解析式的结果,i为采样点数,n为总采样点数;使用差分进化智能算法,对稳态控制器参数进行优化,优化目标为目标函数e的值最小,获得最终描述双馈型风力发电机组的双馈风机故障电流解析式。
19、进一步地,所述的双馈风机故障电流解析式如下:
20、
21、其中,k为故障后的定子电压与故障前电压us0之比;us0为故障前定子侧稳态电压us0的幅值;j表示虚数;ω1为同步转速;t1=ls/rs,rs、ls分别为发电机定子回路的电阻和电感;t2=σlr/rra,rra=rr+ra,rr、lr分别为发电机转子回路的电阻和电感,ra为crowbar电阻;lm为发电机定转子间互感;t表示时间;σ为风机的漏磁系数;kpv、kiv为gsc电压外环控制环节的比例积分系数,分别对应控制环节p、控制环节i;ωr为转子角速度;ir0为转子稳态运行的电流;ig0为故障前稳态时的网侧电流;ig,ref为gsc电流在三相静止坐标系下的指令值;p为微分算子,
22、进一步地,所述双馈型风电机组电气部分的双馈异步发电机模型如下:
23、在两相旋转dq坐标系下建立双馈异步发电机的数学模型,其电压和磁链方程为:
24、
25、式中:rs、ls为发电机定子回路的电阻和电感;rr、lr为发电机转子回路的电阻和电感;lm为发电机定转子间互感;ψs,dq、ψr,dq为发电机定子、转子dq轴磁链;us,dq、ur,dq为发电机定子、转子dq轴电压;is,dq、ir,dq为发电机定子、转子dq轴电流;ω1为同步转速;ω为转差速度;
26、然后将两相旋转坐标系中的dfig数学模型变换到三相静止坐标系中。
27、进一步地,crowbar动作后的dfig电压和磁链方程如下:
28、
29、进一步地,所述机侧变流器控制器,即rsc如下:
30、rsc采用定子磁链定向的矢量控制,rsc控制的电压指令表达式为:
31、ur,ref=kpr(ir,ref-ir,dq)+kir∫(ir,ref-ir,dq)dt+jωσlrir,dq (3)
32、式中:ur,ref、ir,ref分别为转子电压和转子电流的指令值;kpr和kir为pi控制环节的比例积分系数;σ为风机的漏磁系数;
33、当电网电压发生跌落、crowbar未动作时,转子电流受rsc控制;定子电流如下:
34、
35、故障前的定子稳态磁链ψs0和故障后定子磁链ψsf如下:
36、
37、
38、式中,ψs0和ψsf为三相静止坐标系下的值;τ1为衰减时间常数,τ1=rs/ls;ω1=2πf=100π(rad/s);t表示时间;ψsf通过角标f表示故障状态下三相静止坐标系下的定子磁链ψs;
39、故障后转子磁链和转子电流的关系式为:
40、
41、ψrf通过f(f表示fault,即故障时)表示故障状态下三相静止坐标系下的转子磁链ψr。
42、基于故障后转子磁链和转子电流的关系得到
43、
44、式中,fs(ψs)为定子磁链ψs的一个函数,fs(ψs)=(pψsf+jωψsf)lm/ls;p表示微分算子;
45、解方程(8)即得到故障转子电流的表达式,结合定子磁链和转子电流表达式,获得电压非深度跌落时的定子电流表达式:
46、
47、式中,ir0为转子稳态运行的电流;λ1、λ2、β1、β2的值分别为isf为通过f表示的故障状态下的is,dq。
48、进一步地,故障后转子磁链和转子电流的关系为
49、进一步地,所述网侧变流器控制器,即gsc如下:
50、gsc的电压外环控制方程为:
51、igd=kpv(udc-udc,ref)+kiv∫(udc-udc,ref)dt (10)
52、其中,igd为gsc电流d轴分量,udc、udc,ref分别为网侧变流器电压控制外环的直流电压值和直流电压指令值;
53、电流内环控制方程为:
54、
55、式中,lg为滤波等效电感,udc为直流母线电压,igq为gsc电流q轴分量,us为网侧基波正序电压,ugq,ref=s(t)udc,s(t)为gsc的开关函数;
56、gsc的功率平衡方程为:
57、p-1.5ugdigd=udccbuspudc (12)
58、式中,cbus为直流母线电容,p为风电机组的功率值,p为微分算子;
59、联立(10)至(12),得到对称故障时的电流为:
60、
61、ig为gsc电流在三相静止坐标系下的值,igd0为稳态运行时gsc电流d轴分量。
62、gsc的基本电压方程式为:
63、ug=rrig+lg(pig+jω1ig)+us (14)
64、其中,ug为gsc电压在三相静止坐标系下的值;
65、通过式(11)和式(14),得到gsc的电流微分方程:
66、
67、其中,rg为滤波等效电阻,lg为滤波等效电感;p2表示二阶导;
68、求解得到gsc的输出电流解析表达式为:
69、
70、式中,ig,ref为gsc电流在三相静止坐标系下的指令值,由igd,ref和igq,ref经由两相旋转dq坐标系至三相静止abc坐标系的变换矩阵变换得到;ig0为故障前稳态时的gsc电流。
71、进一步地,所述故障穿越控制器的数学模型如下:
72、a、当电网在t1时刻发生低电压故障,风电机组检测到系统电压下降到阈值以下,切换到低电压穿越控制逻辑,即切除转子侧控制器的功率外环,将其控制结构切换为故障的控制结构,后接电流内环;风电机组在发生低穿故障后,向电网注入无功电流以支撑电网电压恢复,风电场向电网输出的动态无功电流为:
73、isql=kql·(0.9-us)in (17)
74、故障期间对应的转子侧无功电流参考值irql如下:
75、
76、式(17)和式(18)中,kql为低电压穿越无功支撑系数,由并网标准决定;in为机组的额定电流;us为网侧基波正序电压;
77、故障期间,风电机组有效发出无功功率以支撑电网电压,有功电流受到无功电流的出力限制,故障期间转子侧有功电流的参考值irdl为:
78、
79、式中,irdl为故障期间有功电流的参考值;idrn为故障发生前有功电流的稳态值;irmax为最大转子电流;kp_p为有功功率外环控制器的比例系数,ki_p为有功功率外环控制器的积分系数;pref为有功功率参考值,p为风电机组的功率值;
80、当电网在tb时刻低电压故障切除,电压恢复到故障前的正常水平;此时无功功率在故障切除后瞬间恢复到稳态水平;以一定恢复速率恢复的转子侧有功电流参考值irdre:
81、irdre=kp_p(pre,ref-p)+ki_p∫(pre,ref-p)dt (20)
82、式中,pre,ref为故障恢复期间有功功率的参考值;
83、故障恢复期间,pre,ref的表达式为:
84、
85、其中,kid1,kid2分别为两种不同的有功功率恢复速率;pfault为dfig在故障期间发出的稳态有功功率;tb为故障切除时刻;tc为功率恢复阶段有功以第二种斜率恢复的起始时刻;pef为故障恢复期间的dfig有功功率值;pen为dfig故障前发出的稳态有功功率;
86、b、当电网在t1时刻发生高电压故障,风电机组检测到系统电压上升到阈值以上,切换到高电压穿越控制逻辑;风电机组在发生高穿故障后,向电网吸收无功电流以降低电网电压升高带来的影响,无功电流需要根据电压升高程度进行调节;故障期间,风电场向电网吸收动态无功电流为:
87、isqh=kqh·(us-1.1)in (22)
88、故障期间对应的转子侧无功电流参考值irqh如下:
89、
90、式(22)和式(23)中kqh为高电压穿越无功支撑系数,由并网标准决定;in为机组的额定电流;
91、在故障期间有功功率保持稳态时的控制逻辑;
92、当电网在tb时刻高电压故障切除,电压恢复正常;有功功率依然保持稳态时的控制逻辑,无功功率在故障切除后瞬间恢复到稳态水平。
93、进一步地,crowbar保护的作用下的定子短路电流如下:
94、t1~t2时刻的定子电流表达式同式(9);
95、
96、式中,ψsf2通过f2表示第二阶段故障状态下的三相静止坐标系下的定子磁链ψs;
97、crowbar触发后,得到关于转子磁链的微分方程为:
98、
99、解微分方程(25),未知数为ψr,dq求解完成后记为ψra,求解得到转子磁链表达式为:
100、
101、式中,τ2为衰减常数,τ2=rra/σlr;与crowbar动作时的磁链初始状态表达式(24)相结合,得到以τ2为衰减时间常数的直流分量初始值c1,其中
102、再由磁链方程得crowbar动作后的定子电流isf2:
103、
104、式中,
105、双馈型风电机组故障电流解析及其参数的优化系统,双馈型风电机组采用两个背靠背、通过直流环节连接的变流器进行交流励磁;将网侧变流器控制器简记为gsc;将机侧变流器控制器简记为rsc;所述系统包括:
106、故障数据获取单元:基于rsc、gsc及crowbar保护的作用获取故障数据,具体过程包括:
107、将转子电压和转子电流的指令值记为ur,ref和ir,ref,构建rsc影响的定子短路电流,其中转子电流指令值的d、q轴分量记为irq,ref、ird,ref;将gsc电压、电流的d、q轴分量的指令值记为ugd,ref,ugq,ref和igd,ref,igq,ref,构建电网故障时的gsc输出电流;
108、针对发生低电压故障的情况确定故障期间对应的无功电流irql和有功电流irdl,以及低电压故障切除后恢复的有功电流irdre;irql、irdl对应故障期间的irq,ref、ird,ref,irdre对应故障切除后恢复期间的ird,ref;针对发生高电压故障的情况确定故障期间对应的无功电流irqh,irqh对应故障期间的irq,ref;故障期间有功功率在保持稳态时的控制逻辑;
109、参数中的角标r用于表示转子侧对应的参数,也就是机侧对应的参数;参数中的角标re用于表示恢复过程对应的参数;参数中的角标ref用于表示对应参数为相应的指令值参考值,也就是对应参数的参考值;
110、电流解析和参数优化单元:对双馈型风电机组的故障电流进行解析和参数优化,包括:
111、三相电压电流获取模块:基于电压跌落和/或电压升高故障测试,获得风机出口三相电压和三相电流;
112、故障穿越控制器参数确定模块:基于风机出口三相电压和三相电流,提取电压跌落工况下的基波正序电压和基波正序无功电流,将基波正序无功电流对应为irql,进而得到低电压穿越无功支撑系数kql;提取电压跌落工况下故障功率恢复过程中变化的有功功率,确定对应的有功功率恢复速率kid1和kid2;或者,提取电压升高工况下的基波正序电压和基波正序无功电流,将基波正序无功电流对应为irqh,进而得到高电压穿越无功支撑系数kqh;
113、双馈风机故障电流解析模块:首先将kpr、kir、kp_p、ki_p、kpv、kiv、kpg、kig代入双馈风机故障电流解析式;其中,kpr和kir为rsc电流内环pi控制环节的比例积分系数;kp_p和ki_p为rsc有功功率外环控制器的比例积分系数;kpv和kiv为gsc电压外环控制环节的比例积分系数,kpg和kig为gsc电流内环控制环节的比例积分系数;
114、假设故障发生时刻为t1,crowbar动作时刻为t2;
115、当crowbar未动作时,即t1≤t≤t2,若发生低电压故障穿越,将s2步骤中确定的故障穿越控制器参数带入故障穿越控制器模型得到故障期间对应的有功电流irdl和无功电流irql,以及低电压故障切除后的恢复的有功电流irdre,irql、irdl对应故障期间的irq,ref、ird,ref,irdre对应故障切除后恢复期间的ird,ref,分别接入双馈风机故障电流解析式中的机侧电流指令值ir,ref得到低电压故障对应的双馈风机故障电流解析式并解析电流;
116、当crowbar未动作时,即t1≤t≤t2,若发生高电压故障穿越,将s2步骤中确定的故障穿越控制器参数带入故障穿越控制器模型中,得到故障期间的irqh,将irqh接入双馈风机故障电流解析式中的irq,ref;故障期间有功功率在保持稳态时的控制逻辑;将对应的有功电流与无功电流代入双馈风机故障电流解析式中的机侧电流指令值ir,ref得到高电压故障对应的双馈风机故障电流解析式并解析电流;
117、在crowbar未动作的故障穿越期间,代入双馈风机故障电流解析式中的ir,ref具体数值由实际故障穿越所处的具体阶段实际确定;
118、当crowbar动作后,即t>t2,crowbar电阻将转子绕组短路,使dfig作为笼型异步发电机继续运行;此时,将对应的控制器参数及稳态运行数据代入双馈风机故障电流解析式,组成crowbar动作后的双馈风机故障电流解析式并解析电流;
119、优化模块:在三相电压跌落或升高工况下,将三相电流和三相电压变换为dq轴直流量,设定目标函数其中ai为实测短路电流数据,bi为故障电流解析式的结果,i为采样点数,n为总采样点数;使用差分进化智能算法,对稳态控制器参数进行优化,优化目标为目标函数e的值最小,获得最终描述双馈型风力发电机组的双馈风机故障电流解析式。
120、与现有技术相比,本发明的有益效果在于:
121、提高解析表达式的准确性与实用性:本发明通过综合考虑不同电网电压跌落深度及rsc、gsc控制,并根据实际故障工况计及crowbar保护动作及其延时性的影响,推导出包含crowbar的短路电流表达式,控制影响因素更加全面,使得表达式更加准确,更适合实际运用。
122、提供更准确的控制参数:本发明通过详细和精确的电磁暂态建模,构建双馈型风电机组的仿真模型,能够更准确的反应风电机组控制参数与故障电流的关系。这种准确性是基于仿真模型仿真步长的精细化、仿真参数的准确化,能够为双馈型风电机组的故障特性分析提供更准确的依据。
123、智能算法优化:本发明基于现场实测数据优化双馈风机的故障电流解析式,通过使用差分进化的智能算法,能够更精确地模拟和预测实际运行场景下风电机组的故障电流。智能算法的运用使得双馈风电机组的故障电流解析表达式在理论上更精确,在实际应用中适用性更广泛。
124、有效利用现场实际数据:本发明有效利用现场实测的双馈风机故障电流录波数据,以其为依据优化风电机组的控制参数,理论与实际相结合的方法提高了解析表达式的准确性与实用性,使理论预测结果与现场实际之间的误差更小。
125、简言之,本发明为双馈性风电机组的故障电流分析提供了一种更加准确、更具有实用性的解析表达式,对确保电力系统的稳定性与可靠性具有积极的意义。
本文地址:https://www.jishuxx.com/zhuanli/20240819/274748.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。