一种电池模组抓取装置的制作方法
- 国知局
- 2024-08-19 15:02:19
本技术涉及电池,具体涉及一种电池模组抓取装置。
背景技术:
1、电池包是新能源汽车等的核心部件,电池包一般是由多个电池模组安装在壳体中组合而成,对于新能源汽车组装环节,目前多依赖工业机器人自动组装,人工参与度较低,而在研发试制阶段,则人工参与度较高,常需要人工对电池模组进行抓取,如授权公告号cn211125862u的实用新型专利,公开了一种电池模组抓取装置,其采用梯形柱和弹簧钢开柱与电池模组的圆孔紧密配合,通过上提把手将电池模组从电池箱中提出转移,但是此种结构在实际使用中,需要将梯形柱对准电池模组上的圆孔,需要不停的观察梯形柱和圆孔的位置,然后进行调整,存在使用上的不便。
技术实现思路
1、本实用新型的目的是提供一种电池模组抓取装置,解决目前的电池模组抓取装置使用不便的问题。
2、为实现上述目的,本实用新型采用如下技术方案:
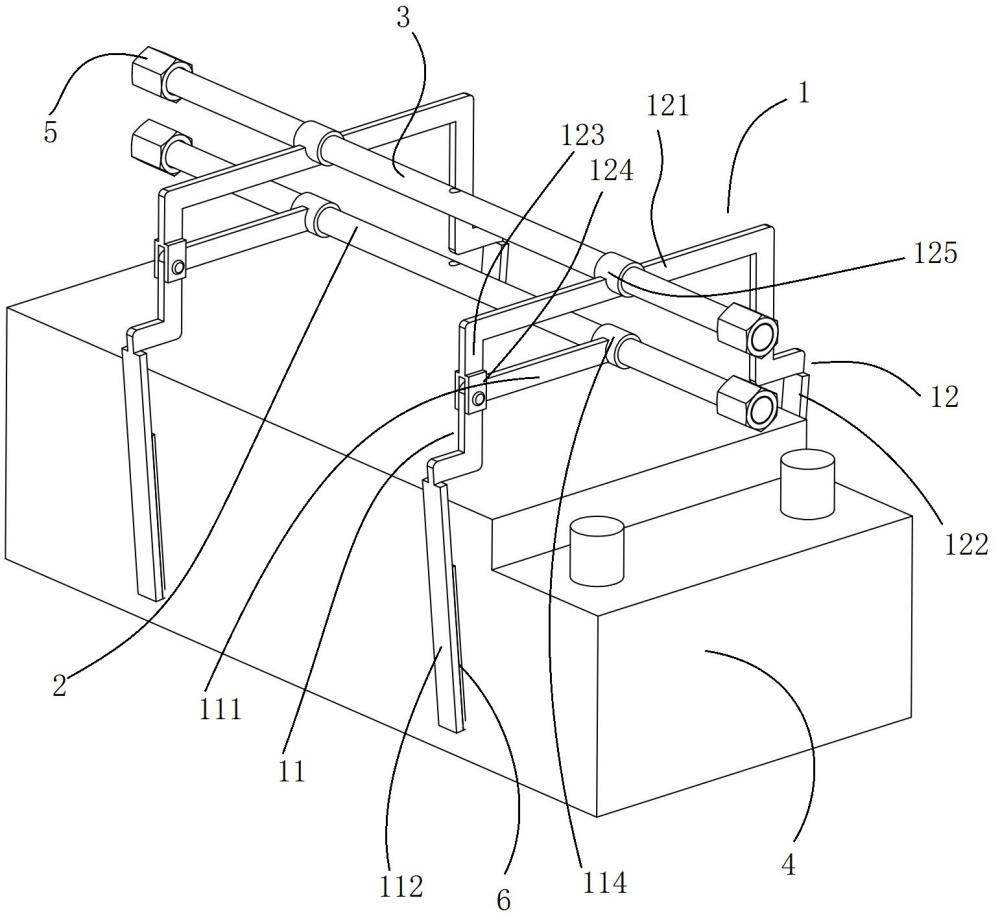
3、一种电池模组抓取装置,包括两个间隔设置的夹爪机构,所述夹爪机构包括第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪铰接,所述第一夹爪和所述第二夹爪相对靠近用于抓取电池模组,其中,所述第一夹爪连接有第一手持杆,所述第二夹爪连接有第二手持杆,所述第一夹爪与所述第一手持杆滑动连接,所述第二夹爪与所述第二手持杆滑动连接,所述第一手持杆和所述第二手持杆上下设置,所述第一手持杆和所述第二手持杆的相互移动用于带动所述第一夹爪和所述第二夹爪抓取或放开电池模组。
4、进一步地,所述第一夹爪包括第一横臂和第一夹紧板,所述第一夹紧板上下设置,所述第一横臂和所述第一夹紧板呈z字形设置,所述第一横臂靠近所述第一夹紧板一端设置有第一铰接孔,所述第二夹爪与所述第一夹爪通过所述第一铰接孔铰接。
5、进一步地,所述第二夹爪包括第二横臂和第二夹紧板,所述第二夹紧板上下设置,所述第二横臂和所述第二夹紧板呈z子形设置,所述第二横臂远离所述第二夹紧板的一端设置有竖板,所述竖板上设置有铰接座,所述铰接座与所述铰接孔通过铰接轴铰接。
6、进一步地,所述第一横臂远离所述第一夹紧板的一端设置有第一套管,所述第一手持杆套设在所述第一套管中,所述第二横臂中间位置设置有第二套管,所述第二手持杆套设在所述第二套管中,其中,所述第二套管位于所述第一套管上方。
7、进一步地,所述第一手持杆和所述第二手持杆的两端均设置有堵头。
8、进一步地,所述第一夹紧板上用于夹持电池模组的一侧设置有第一防滑垫,所述第二夹紧板上用于夹持电池模组的一侧设置有第二防滑垫。
9、本实用新型的有益效果:
10、本实用新型的电池模组抓取装置,夹爪机构包括第一夹爪和第二夹爪,第一夹爪和第二夹爪铰接,通过第一夹爪和第二夹爪的相对靠近来抓取电池模组,第一夹爪连接有第一手持杆,第二夹爪连接有第二手持杆,同时,第一夹爪与第一手持杆滑动连接,第二夹爪与第二手持杆滑动连接,第一手持杆和第二手持杆上下设置,第一手持杆和第二手持杆的相互移动,能够带动第一夹爪和第二夹爪抓取或者放开电池模组,在实际使用时,需要抓取转移电池模组时,将第一夹爪和第二夹爪置于电池模组两侧即可,然后自然抓取第一手持杆和第二手持杆,随着第一手持杆和第二手持杆的相对靠近,即可抓取牢固电池模组,通过可根据实际需求,调整两个夹爪机构的相对位置,以适应不同类型的电池模组的抓取需求。
技术特征:1.一种电池模组抓取装置,其特征在于:包括两个间隔设置的夹爪机构,所述夹爪机构包括第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪铰接,所述第一夹爪和所述第二夹爪相对靠近用于抓取电池模组,其中,所述第一夹爪连接有第一手持杆,所述第二夹爪连接有第二手持杆,所述第一夹爪与所述第一手持杆滑动连接,所述第二夹爪与所述第二手持杆滑动连接,所述第一手持杆和所述第二手持杆上下设置,所述第一手持杆和所述第二手持杆的相互移动用于带动所述第一夹爪和所述第二夹爪抓取或放开电池模组。
2.根据权利要求1所述的电池模组抓取装置,其特征在于:所述第一夹爪包括第一横臂和第一夹紧板,所述第一夹紧板上下设置,所述第一横臂和所述第一夹紧板呈z字形设置,所述第一横臂靠近所述第一夹紧板一端设置有第一铰接孔,所述第二夹爪与所述第一夹爪通过所述第一铰接孔铰接。
3.根据权利要求2所述的电池模组抓取装置,其特征在于:所述第二夹爪包括第二横臂和第二夹紧板,所述第二夹紧板上下设置,所述第二横臂和所述第二夹紧板呈z子形设置,所述第二横臂远离所述第二夹紧板的一端设置有竖板,所述竖板上设置有铰接座,所述铰接座与所述铰接孔通过铰接轴铰接。
4.根据权利要求3所述的电池模组抓取装置,其特征在于:所述第一横臂远离所述第一夹紧板的一端设置有第一套管,所述第一手持杆套设在所述第一套管中,所述第二横臂中间位置设置有第二套管,所述第二手持杆套设在所述第二套管中,其中,所述第二套管位于所述第一套管上方。
5.根据权利要求4所述的电池模组抓取装置,其特征在于:所述第一手持杆和所述第二手持杆的两端均设置有堵头。
6.根据权利要求5所述的电池模组抓取装置,其特征在于:所述第一夹紧板上用于夹持电池模组的一侧设置有第一防滑垫,所述第二夹紧板上用于夹持电池模组的一侧设置有第二防滑垫。
技术总结本技术涉及一种电池模组抓取装置,包括两个间隔设置的夹爪机构,夹爪机构包括第一夹爪和第二夹爪,第一夹爪和第二夹爪铰接,第一夹爪和第二夹爪相对靠近用于抓取电池模组,其中,第一夹爪连接有第一手持杆,第二夹爪连接有第二手持杆,第一夹爪与所述第一手持杆滑动连接,第二夹爪与第二手持杆滑动连接,第一手持杆和第二手持杆上下设置,第一手持杆和第二手持杆的相互移动用于带动第一夹爪和第二夹爪抓取或放开电池模组。本技术实现了手动抓取的便利性,同时能够调整抓取位置,以适应更多的电池模组抓取需求。技术研发人员:王永,王莹莹,白天明,郭军,李亚西,郑方源受保护的技术使用者:唐山海泰数字能源技术有限公司技术研发日:20231227技术公布日:2024/8/16本文地址:https://www.jishuxx.com/zhuanli/20240819/277219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表