一种用于水面漂浮物检测的边缘融合YOLOv5算法的制作方法
- 国知局
- 2024-08-22 14:15:30
本发明涉及目标检测,尤其涉及一种用于水面漂浮物检测的边缘融合yolov5算法。
背景技术:
1、目标检测作为计算机视觉领域的一个关键任务,经历了多个阶段的发展。早期的目标检测方法主要基于手工设计的特征和传统的机器学习技术,例如基于haar小波的特征(haar-like features, haar特征)、方向梯度直方图(histogram of orientedgradients, hog),等。这些方法在一些简单的场景中表现良好,但在复杂场景中往往效果有限;特别是在目标的尺寸、姿态和遮挡变化较大时,区域建议方法通过生成候选区域来减少处理的区域数量,然后在这些候选区域上应用分类器。
2、随着深度学习技术的崛起,目标检测进入了一个新的时代;alexnet的成功标志着深度学习在图像识别任务中的突破。这也激发了研究者将深度学习应用于目标检测。基于区域的卷积神经网络(region-based convolutional neural network, r-cnn)的提出,首次将深度学习与目标检测结合。r-cnn使用选择性搜索(selectivesearch)提取候选区域,然后使用卷积神经网络(convolutional neural network, cnn)对这些区域进行分类。这种两阶段的设计使得整个检测流程更为复杂,因为需要分别处理候选区域生成和深度网络推断两个阶段。选择性搜索等传统方法用于生成候选区域,这些方法在大规模的图像上运行,导致了较慢的处理速度。生成大量候选区域也增加了后续的计算量,因为每个候选区域都需要进行深度网络的前向传播,而这一过程需要大量的计算资源。在感兴趣区域(regionof interest, roi)中,r-cnn需要将每个不同大小的候选区域映射到固定大小的特征图上,这一过程涉及到复杂的插值计算,增加了计算复杂性。faster r-cnn引入了区域候选网络(region proposal network, rpn),实现了端到端的目标检测,同时减少了区域提议的计算时间。
3、你只需识别一次(you only look once, yolo)是一种实现目标检测算法,与传统的两阶段方法不同,yolo采用单阶段的设计,把目标检测任务建模为一个回归问题,再将图像分成网络,进而在每个网格上检测目标的边界框和类别。整个检测过程是端到端的,直接输出目标的位置和类别。将目标检测任务整合到一个单一的神经网络中,这消除了r-cnn等两阶段方法中独立进行区域提取和目标分类的需求,从而减少了计算时间。
4、但是,yolo由于使用粗糙的网格划分图像,每个网格单元负责一个边界框的预测,可能导致对目标位置的估计不够精确。
5、总的来说,目标检测经历了从传统方法到深度学习方法的演变,从两阶段方法到单阶段方法的转变,以及对速度和准确性的不断追求。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种用于水面漂浮物检测的边缘融合yolov5算法,有效的解决已有目标检测算法在速度和准确性上较差的问题。
2、为实现上述目的,本发明的技术方案为:
3、一种用于水面漂浮物检测的边缘融合yolov5算法,包括:特征提取、特征融合和多分类器模块;
4、包括以下步骤:
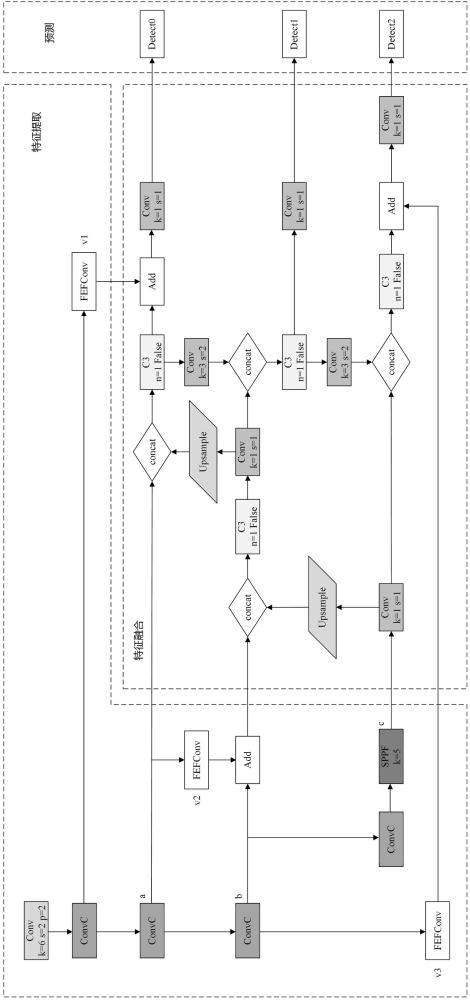
5、s1、特征提取:
6、利用快速边缘聚焦卷积模块生成v1、v2和v3三幅特征图;其特别凸显了边缘信息,再对特征图v2和b进行相加,作为新的特征图v2b输出;
7、s2、特征融合:
8、在不同尺度特征图基础上进行空间金字塔池化,以增强尺度不变性,引入路径聚合网络和注意力机制提高特征复杂度,再通过上采样和下采样进一步凸显边缘细节;
9、s3、多分类器模块进行特征点判断:
10、设计三种独特的yolo head分类器,对特征融合模块输出的融合特征进行特征点判断,以实现高精度分类识别。
11、优选的,在步骤s1中:
12、对输入图像进行卷积操作后,经过convc模块后分两部分进行;
13、其中,一部分经过快速边缘聚焦卷积模块后得到v1特征图,另一部分再次经过convc模块得到a特征图;
14、由a特征图,经过快速边缘聚焦卷积模块得到v2特征图,经过convc模块得到b特征图,v2和b特征图相加后作为新的特征图v2b输出;
15、由b特征图,经过快速边缘聚焦卷积模块得到v3特征图,经过convc模块和sppf模块得到c特征图。
16、优选的,在步骤s2、s3中:
17、对特征图c进行缩放和上采样后与v2b进行拼接,再经过c3注意力机制后,再次进行缩放和上采样后与特征图a进行拼接;
18、此时,进行缩放的为p1,然后经过一个c3注意力机制与v1特征图进行相加,最后经缩放操作后输出至第一yolo head分类器;
19、对p2进行conv操作后与p1进行拼接,然后经过c3注意力机制和缩放后,输出至yolo head分类器;
20、将p3经过conv操作后,与经过缩放的特征图c进行拼接,对拼接结果经过c3注意力机制后与特征v3相加,在缩放操作后输出至第三yolo head分类器。
21、优选的,所述快速边缘聚焦卷积模块为:
22、使用五个5*5的卷积核,步长为1、填充为2,对输入数据进行边缘特征提取,然后将这些不同卷积核提取的特征矩阵进行相加处理。
23、优选的,所述快速边缘聚焦卷积模块处理的具体过程为:
24、在提取特征的同时保持原始输入数据的空间尺寸,提取到的特征通过一个卷积层进一步处理;
25、接着,应用批量归一化处理,规范化特征;
26、最后,通过一个激活函数silu来增加模型的非线性能力,使得模型可以捕获更为复杂的特征关系。
27、本算法对yolov5架构上进行改进,引入一种新型的特征提取快速边缘聚焦卷积模块,对特征提取和特征融合部分进行改进,有效地增强了特征传播,促进了特征重用,提高了网络性能。快速边缘聚焦卷积模块的设计旨在通过特殊的卷积核来增强对边缘特征的提取,以弥补传统yolo网络在目标边缘特征提取方面的缺陷,从而提高对目标位置估计的准确性。
技术特征:1.一种用于水面漂浮物检测的边缘融合yolov5算法,其特征在于,包括:特征提取、特征融合和多分类器模块;
2.根据权利要求1所述的一种用于水面漂浮检测的边缘融合yolov5算法,其特征在于,在步骤s1中:
3.根据权利要求2所述的一种用于水面漂浮检测的边缘融合yolov5算法,其特征在于,在步骤s2、s3中:
4.根据权利要求1所述的一种用于水面漂浮检测的边缘融合yolov5算法,其特征在于,所述快速边缘聚焦卷积模块为:
5.根据权利要求4所述的一种用于水面漂浮检测的边缘融合yolov5算法,其特征在于,所述快速边缘聚焦卷积模块处理的具体过程为:
技术总结一种用于水面漂浮物检测的边缘融合YOLOv5算法,解决已有目标检测算法在速度和准确性上较差的问题。其包括包括:特征提取、特征融合和多分类器模块;包括以下步骤:S1、特征提取:利用快速边缘聚焦卷积模块生成V1、V2和V3三幅特征图,其特别凸显了边缘信息,再对特征图V2和b进行相加,作为新的特征图V2b输出;S2、特征融合:在不同尺度特征图基础上进行空间金字塔池化,以增强尺度不变性,引入路径聚合网络和注意力机制提高特征复杂度,再通过上采样和下采样进一步凸显边缘细节;S3、多分类器模块进行特征点判断:设计三种独特的Yolo Head分类器,对特征融合模块输出的融合特征进行特征点判断,以实现高精度分类识别。技术研发人员:韩振宇,刘辉,余国河,曹连海,周学军,王博达,任朝栋,张继民,李葛爽,杨世纪受保护的技术使用者:中电科新防务技术有限公司技术研发日:技术公布日:2024/8/21本文地址:https://www.jishuxx.com/zhuanli/20240822/277708.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表