柔性缆绳动力学仿真分析方法、装置、设备、存储介质与流程
- 国知局
- 2024-08-22 14:21:57
本发明涉及柔性缆绳动力学仿真分析,特别涉及一种柔性缆绳动力学仿真分析方法、装置、设备、存储介质。
背景技术:
1、沿海近岸工程建设一直是发展的重要部分,在向深海发展中,越来越多地收到复杂地质和水文环境的问题,给工程建设施工增加了困难,如何更快更直观地预测和发现建设中潜在的问题,是仿真和控制技术的一大难点,而建设施工过程缆绳的有效稳定控制方法目前研究相对较少。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种性缆绳动力学仿真分析方法、装置、设备、存储介质,能够高效实时地实现柔性缆绳的安全控制。
2、第一方面,本发明实施例提供了一种柔性缆绳动力学仿真分析方法,包括:
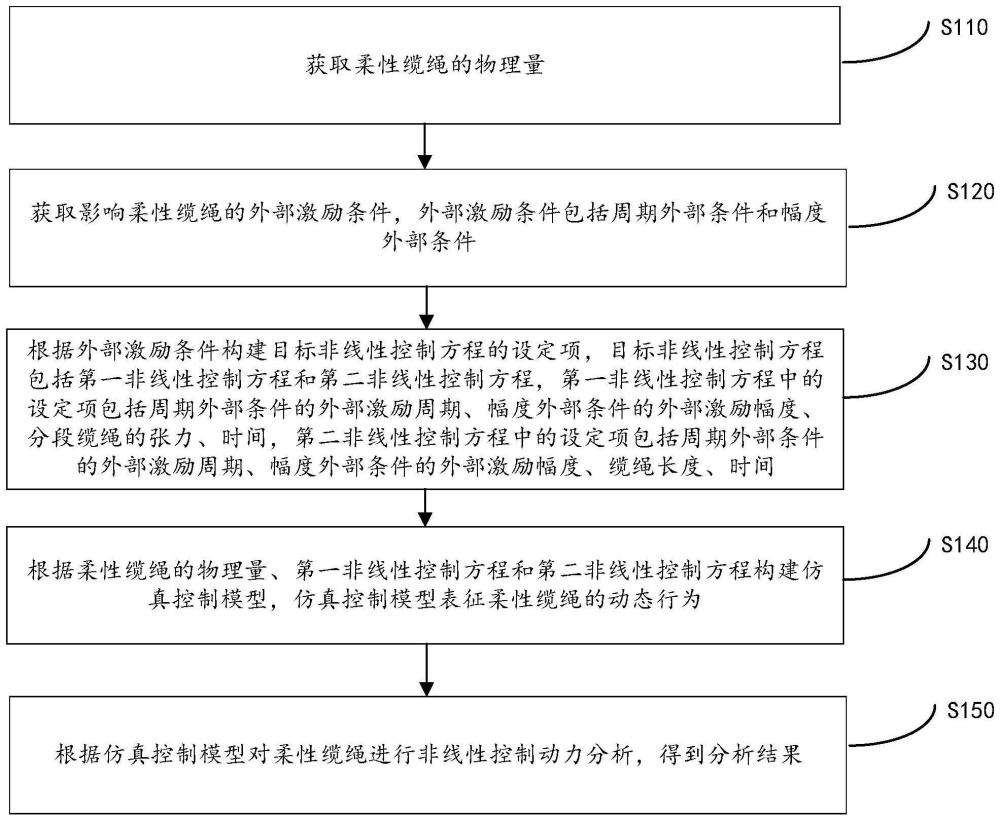
3、获取柔性缆绳的物理量;
4、获取影响所述柔性缆绳的外部激励条件,所述外部激励条件包括周期外部条件和幅度外部条件;
5、根据所述外部激励条件构建目标非线性控制方程的设定项,所述目标非线性控制方程包括第一非线性控制方程和第二非线性控制方程,所述第一非线性控制方程中的设定项包括所述周期外部条件的外部激励周期、所述幅度外部条件的外部激励幅度、分段缆绳的张力、时间,所述第二非线性控制方程中的设定项包括所述周期外部条件的外部激励周期、所述幅度外部条件的外部激励幅度、缆绳长度、时间;
6、根据所述柔性缆绳的所述物理量、所述第一非线性控制方程和所述第二非线性控制方程构建仿真控制模型,所述仿真控制模型表征所述柔性缆绳的动态行为;
7、根据所述仿真控制模型对所述柔性缆绳进行非线性控制动力分析,得到分析结果;
8、其中,对所述仿真控制模型的训练包括:
9、对所述柔性缆绳进行分段处理,基于动态离散算法,根据所述柔性缆绳的分段数量、所述目标非线性控制方程的求解结果插入和删除仿真节点和单元;
10、记录所述柔性缆绳中不同分段的节点坐标和物理量,并根据单元求解得到单元位置的值;
11、对所述仿真控制模型进行离散处理;
12、为所述仿真控制模型中的所述第一非线性控制方程和所述第二非线性控制方程选择不同的阻尼函数、阶数和系数方程;
13、通过预设数值方法对所述仿真控制方程中的导数项进行离散,所述预设数值方法包括前差、后差和中心差分;
14、构建控制端的缆绳离散方程,将控制端确定为所述仿真控制方程中的单元长度参数。
15、在本发明的一些实施例中,所述根据所述柔性缆绳的所述物理量、所述第一非线性控制方程和所述第二非线性控制方程构建仿真控制模型中,所述仿真控制模型为:
16、
17、其中,m为所述柔性缆绳的单位质量和附加质量,为所述柔性缆绳的分段缆绳质量控制点坐标向量,t为分段缆绳的张力,se为所述柔性缆绳的单元长度,v为分段缆绳的剪力,m为分段缆绳的弯矩,为沿缆绳长度方向的分布荷载,k为求导阶数,n为求导项总数,为附加重力和接触力,为波浪水流拖曳力,l为缆绳长度,fk为第一非线性控制方程的设定项,gk为第二非线性控制方程的设定项;ts为周期外部条件的外部激励周期;hs为幅度外部条件的外部激励幅度,t为时间。
18、在本发明的一些实施例中,所述对所述仿真控制模型进行离散处理中,公式的离散结果为:
19、
20、其中,为公式的离散结果,t和v的下标是单元编号,w和f的下标是节点编号;m是质量矩阵,rj为第j个节点坐标,即为对rj二次导数,得出运动加速度;
21、其中e是弹性模量,d是直径,rj为第j个节点坐标,lj是第j分段长度,|rj+1-rj|是计算rj+1和rj的距离,是rj的速度,c是阻尼系数,是位移和速度差的点乘运算;
22、其中,m为质量矩阵,ρ是缆绳密度,ρw是水密度,i是单位矩阵,c1是横向附加质量系数,c2是切向附加质量系数,其中
23、bj是附加的额外设置的力;
24、
25、ddn是横向拖曳系数,ddt是切向拖曳系数;
26、δsk=|rj+1-rj|,rk=(rj+1-rj)/δsk,ik是单元k的刚度。
27、在本发明的一些实施例中,所述构建控制端的缆绳离散方程,将控制端确定为所述仿真控制方程中的单元长度参数中,
28、控制端的缆绳离散方程为:
29、
30、其中,为控制端的缆绳离散方程的离散结果,m2是离散涉及的第一节点数量,p是控制节点编号,p=j+1,bi是预设的系数;
31、所述控制端为:作为t、v和f中的单元长度lj参数,m1是离散涉及的第二节点数量;ci是预设的系数;lp为第p个控制节点的长度。
32、在本发明的一些实施例中,所述构建控制端的缆绳离散方程,将控制端确定为所述仿真控制方程中的单元长度参数后,包括:
33、当控制端的单元长度大于预设的单元长度时,将单元拆分为2个;
34、对中间节点位置进行补充;
35、根据悬链线方程对所述节点坐标进行计算;
36、将所述仿真节点的速度修改为目标速度,将所述仿真节点的加速度修改为目标加速度,其中,所述目标速度为空间位置上临近的所述2个仿真节点的速度的加权平均值,所述目标加速度为空间位置上邻近的2个所述仿真节点的加速度的加权平均值。
37、在本发明的一些实施例中,所述构建控制端的缆绳离散方程,将控制端确定为所述仿真控制方程中的单元长度参数后,包括:
38、当控制端的临近的两个单元长度之和小于预设的单元长度时,删除控制端单元;
39、删除两个单元并创建新的单元,将原两单元两端的两个节点作为新单元的节点,并复制节点的位置、速度和加速度;
40、更新所述仿真节点的速度为原来控制端的速度,更新所述节点的加速度为原来控制端的加速度。
41、在本发明的一些实施例中,所述根据所述柔性缆绳的所述物理量、所述第一非线性控制方程和所述第二非线性控制方程构建仿真控制模型后,包括:
42、通过张力控制模式和绳长控制模式,利用缆力传感器的实时数据,对所述柔性缆绳的张力和长度进行反馈控制以及调整,所述缆力传感器放置在所述柔性缆绳的控制的,用于采集对所述柔性缆绳施加的力。
43、第二方面,本发明实施例提供了一种柔性缆绳动力学仿真分析装置,包括少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行如上述第一方面所述的柔性缆绳动力学仿真分析方法。
44、第三方面,本发明实施例提供了一种电子设备,包括有如上述第二方面所述的柔性缆绳动力学仿真分析装置。
45、第四方面,本发明实施例提供了一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如上述第一方面所述的柔性缆绳动力学仿真分析方法。
46、根据本发明实施例的柔性缆绳动力学仿真分析方法,至少具有如下有益效果:获取柔性缆绳的物理量;获取影响所述柔性缆绳的外部激励条件,所述外部激励条件包括周期外部条件和幅度外部条件;根据所述外部激励条件构建目标非线性控制方程的设定项,所述目标非线性控制方程包括第一非线性控制方程和第二非线性控制方程,所述第一非线性控制方程中的设定项包括所述周期外部条件的外部激励周期、所述幅度外部条件的外部激励幅度、分段缆绳的张力、时间,所述第二非线性控制方程中的设定项包括所述周期外部条件的外部激励周期、所述幅度外部条件的外部激励幅度、缆绳长度、时间;根据所述柔性缆绳的所述物理量、所述第一非线性控制方程和所述第二非线性控制方程构建仿真控制模型,所述仿真控制模型表征所述柔性缆绳的动态行为;根据所述仿真控制模型对所述柔性缆绳进行非线性控制动力分析,得到分析结果;其中,对所述仿真控制模型的训练包括:对所述柔性缆绳进行分段处理,基于动态离散算法,根据所述柔性缆绳的分段数量、所述目标非线性控制方程的求解结果插入和删除仿真节点和单元;记录所述柔性缆绳中不同分段的节点坐标和物理量,并根据单元求解得到单元位置的值;对所述仿真控制模型进行离散处理;为所述仿真控制模型中的所述第一非线性控制方程和所述第二非线性控制方程选择不同的阻尼函数、阶数和系数方程;通过预设数值方法对所述仿真控制方程中的导数项进行离散,所述预设数值方法包括前差、后差和中心差分;构建控制端的缆绳离散方程,将控制端确定为所述仿真控制方程中的单元长度参数。将非线性控制和仿真分析相结合,能够模拟任意设定参数,从而发现工艺过程的问题,进而高效实时地实现对柔性缆绳的安全控制。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278351.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表