一种基于多特征的仿海豚哨声水声通信信号自动调制识别方法
- 国知局
- 2024-08-22 14:23:16
本发明属于仿生伪装水声通信和水声对抗,具体涉及一种基于多特征的仿海豚哨声水声通信信号自动调制识别方法。
背景技术:
1、水声通信信号调制识别是水声对抗中的关键环节,是通信参数估计、干扰引导和信息破译的必要前提。最初的水声信号调制识别通过人工实现,近十几年,发展了基于多种分类模型的自动调制识别技术。中国专利cn112464837b公开了一种基于小数据样本的浅海水声通信信号调制识别方法,基于神经网络实现了{2fsk、4fsk、8fsk、2psk、4psk、8psk、lfm、ofdm}水声通信信号在浅海脉冲噪声环境下的稳健识别;中国专利cn112910813b基于水声信号的形态特征和熵特征,实现了{dsss、bpsk、qpsk、bfsk、qfsk、16qam、64qam、ofdm}水声通信信号的低延迟和高准确率识别;中国专利cn113452637b基于水声信号的瞬时特征、高阶累积量、功率谱特征等,实现了{2ask、4ask、2fsk、4fsk、2psk、qpsk、16qam、dsss}水声通信信号的高效率识别。虽然水声信号调制识别方法在不断更新,但是,这些方法仅限于识别上述常规调制的水声通信信号。随着水声通信技术的发展,新的调制方式和隐蔽通信方法不断出现。仿海豚哨声水声通信作为一种新型隐蔽水声通信技术,因其良好的安全性和通信能力受到关注。但是,在现有水声信号调制识别技术中,针对仿海豚哨声水声通信信号中的不同调制方式,缺少有效的特征参数提取方法和识别方案。
2、仿海豚哨声水声通信通过模拟海洋中固有的海豚哨声实现伪装,使非合作方在检测到信号时,无法分辨是海洋生物噪声还是人工通信信号,达到伪装通信的目的。在中国专利cn104967489b、论文《bionic communicationby dolphin whistle with continuous-phase based on mskmodulation,ieeeinternational conference onsignalprocessing,ieee,2016》和论文《afrequency hopping pattern inspiredbionicunderwater acoustic,physical communication,2021》中,提出一种基于余弦波嵌入调制的仿海豚哨声水声通信算法,将信息调制在余弦波上,并在时频域上与海豚哨声谱轮廓叠加,合成基于余弦嵌入的仿海豚哨声水声通信信号(bio-cos)。bio-cos信号与真实哨声之间的时频相关系数大于0.98,伪装能力较好;当码元宽度大于50ms时,该方法在海试8.4km的传输距离上实现了几乎无误码的稳健通信。在中国专利cn114362835b和论文《基于频移键控的仿海豚哨声水声通信技术,电子与信息学报,2022》中,提出一种基于矩形波嵌入调制的仿海豚哨声水声通信算法,将信息调制在矩形波上,并在时频域上与海豚哨声谱轮廓叠加,合成基于矩形波嵌入的仿海豚哨声水声通信信号(bio-rec)。bio-rec信号与真实哨声之间的时频相关系数在0.995左右,伪装能力进一步提高;当信噪比大于0db时,可以实现误码率低于10–5的可靠通信。bio-cos和bio-rec信号都是基于海豚哨声谱轮廓叠加相应的波形进行调制,具有较高的相似性。此时,直接使用现有水声通信信号特征提取方法无法有效提取到具有辨识能力的参数,导致分类的准确性较低。
技术实现思路
1、本发明的目的在于克服现有水声信号特征参数和识别方法无法有效辨识仿海豚哨声水声通信信号调制方式的问题,提供一种基于多特征的仿海豚哨声水声通信信号自动调制识别方法。
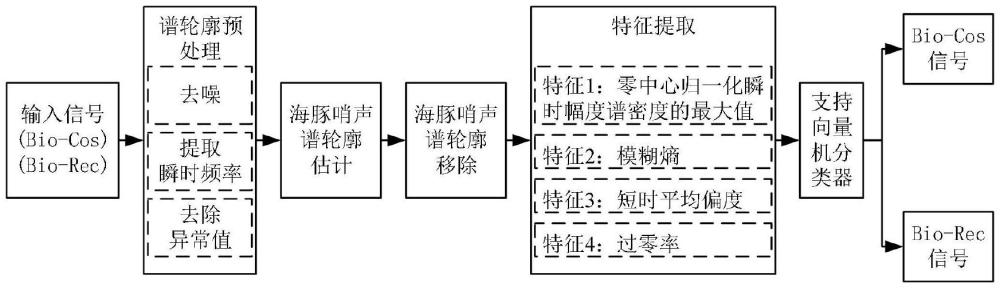
2、一种基于多特征的仿海豚哨声水声通信信号自动调制识别方法,包括以下步骤:
3、步骤1:对仿海豚哨声水声通信信号进行采样,记录采样时间和信号波形;
4、步骤2:对采样得到的信号波形数据集进行预处理,得到仿海豚哨声水声通信信号的时频谱轮廓fbio(i);
5、步骤3:基于时频谱轮廓fbio(i)对应的信号波形数据集,采用最小二乘多项式拟合算法估计仿海豚哨声谱轮廓将fbio(i)与作差,得到去除仿海豚哨声谱轮廓后的原始调制波形y(i);
6、步骤4:对原始调制波形y(i)提取特征,包括零中心归一化瞬时幅度谱密度的最大值γmax、模糊熵enf、短时平均偏度sst和过零率rzc;
7、步骤5:将提取出的特征输入到预训练好的分类器中,得到仿海豚哨声水声通信信号的识别结果。
8、进一步地,所述步骤4中从原始调制波形y(i)提取零中心归一化瞬时幅度谱密度的最大值γmax特征的方法具体为:
9、γmax=max|dft(acn(i))2/n
10、其中,n为信号的采样点数;dft(·)为离散傅里叶变换函数;acn(i)为零中心归一化瞬时幅度;
11、
12、其中,a(i)为信号y(i)经过希尔伯特变换得到的瞬时幅度序列。
13、进一步地,所述步骤4中从原始调制波形y(i)提取模糊熵enf特征的方法具体为:
14、对原始调制波形y(i)重构m维向量:
15、
16、其中,m≤n-2;
17、引入模糊函数定义向量x(i)和x(j)的相似度为:
18、
19、其中,n控制模糊函数边界的梯度,r控制模糊函数边界的宽度;
20、定义函数则模糊熵为:
21、enf=lnφm(n,r)-lnφm+1(n,r)。
22、进一步地,所述步骤4中从原始调制波形y(i)提取短时平均偏度sst特征的方法具体为:
23、
24、其中,l为总帧数,skew(k)表示第k个窗口内的短时偏度;
25、
26、其中,ω(i)表示窗函数,窗长为nl;表示y(i)ω(k-i)的均值,i∈[k-nl+1,k]。进一步地,所述步骤4中从原始调制波形y(i)提取过零率rzc特征的方法具体为:
27、rzc=nzc/n
28、其中,nzc为原始调制波形y(i)中过零点的数量,y(i)中相邻采样点幅值正负变号的点记为过零点。
29、进一步地,所述步骤2中预处理旨在去除信号中的海洋环境背景噪声和干扰,提取信号的谱轮廓,并进一步去除由于海洋环境噪声和多径效应导致的异常值点,包括去噪、瞬时频率提取和异常值移除三个步骤。
30、进一步地,所述步骤2具体为:
31、首先,采用基于改进最小控制递归平均的最优修正对数幅度谱估计算法omlsa-imcra对信号去噪;其次,对去噪的信号进行短时傅里叶变换获得时频图像,通过搜索每个时间窗内的能量最大值点提取仿哨声信号的瞬时频率;最后,针对瞬时频率中残余的海洋环境噪声和多径效应导致的异常值点,采用二次hampel滤波器进行异常值检测并剔除,得到仿海豚哨声水声通信信号的时频谱轮廓fbio(i)。
32、进一步地,所述步骤3中采用最小二乘多项式拟合算法估计海豚哨声谱轮廓的方法具体为:
33、基于时频谱轮廓fbio(i)对应的信号波形数据集,构造j阶多项式:
34、
35、其中,j<n;根据最小二乘拟合原则,使fbio(i)与误差平方和最小时,求解出系数矩阵[a0,a1,...,aj,...,aj],得到仿海豚哨声谱轮廓估计结果
36、进一步地,所述步骤5中分类器的预训练方法具体为:收集包含两种调制类型的仿海豚哨声水声通信信号的采样样本数据,构造数据集;所述两种调制类型为基于余弦嵌入的仿海豚哨声水声通信信号bio-cos、基于矩形波嵌入的仿海豚哨声水声通信信号bio-rec;对于训练集中的数据通过步骤2至步骤4提取四种特征,并将包含四种特征和对应调制类型的训练样本输入分类器中进行训练。
37、本发明的有益效果在于:
38、本发明针对传统水声信号特征参数无法有效辨识仿海豚哨声水声通信信号调制方式的问题,通过分析仿海豚哨声水声通信信号的调制特征,设计了基于最小二乘多项式拟合海豚哨声谱轮廓估计的特征参数集,基于这些特征,提出结合支持向量机分类器的仿海豚哨声水声通信信号自动调制识别方法。通过千岛湖湖试数据集验证了该分类方法对不同调制类型仿海豚哨声水声通信信号的识别效果,当频率偏移量不小于100hz,信噪比大于0db时,平均识别率达到95%以上。本发明为仿海豚哨声水声通信信号调制识别提供了一种可行方案,支撑水声对抗中进一步的通信参数估计、灵巧干扰和信息破译。
本文地址:https://www.jishuxx.com/zhuanli/20240822/278489.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。