仿生机器鱼
- 国知局
- 2024-08-22 14:33:10
本发明涉及水下机器人领域,具体涉及一种仿生机器鱼。
背景技术:
1、随着海洋资源的开发与利用,水下机器人已经成为人类探索海洋的新工具。然而,与自然界的鱼类相比,水下机器人在推进速度和效率等性能上却远远逊色。鱼类经过漫长的自然选择和进化历程,作为水下最典型的生物之一,具备了出色的水下运动能力和环境适应性。受到自然界鱼类的启发,越来越多的研究人员对仿生机器鱼产生了兴趣。仿生机器鱼通过模拟鱼类的行为方式与生理结构,更能适应水下环境,具有推进效率高、游速快、灵活性高、低噪声、工作时间长、工作范围广等优点。
2、经过数十年的发展,目前仿生机器鱼根据其主体结构的不同,可大致分为两类:刚性机器鱼和软体机器鱼。刚性机器鱼通常包括刚性头部、单关节摆动刚性尾部由伺服电机驱动的多关节尾部。虽然刚性机器鱼可以模仿鱼类的游动特征,但其机械结构的复杂性较高,且随着灵活度要求的增加,刚性机器鱼的鲁棒性也随之降低,噪音较大。软体机器鱼系统涉及复杂的流体力学,难以直接建立精确的模型;同时,其长时间在复杂水环境中工作容易出现材料老化、磨损等问题;并且由于其外形结构的设计使得其负载能力较低。
3、因此,研究人员开始寻求性能更优的仿生机器鱼设计方案。生物学研究指出,在那些依赖尾鳍产生主要推力的鱼类中,鱼体前部肌肉承担了大部分的推进作用,而鱼体后部肌肉则只是用来传导力到鱼尾和尾鳍,以实现尾部的摆动。由此,线驱动的仿生机器鱼进入大众视野,其通过拉线机构来模拟鱼类肌肉的收缩和舒张,模拟真实鱼类的体节运动,从而实现自然的波动和摆动效果。线驱动机构有着精度高、刚度高、负载能力强等优点,兼顾了游动速度和柔性特点,是仿生驱动的典型代表。然而,现有的线驱动仿生机器鱼大多存在尾鳍幅值不能调整或者通过电机/舵机的往复运动调整尾鳍幅值的问题。电机/舵机转动方向的不断切换会极大地约束其游动性能释放。
技术实现思路
1、有鉴于此,本发明提供了通过电机连续转动实现尾鳍的往复运动、并且尾鳍摆动幅值和频率可调节的仿生机器鱼。
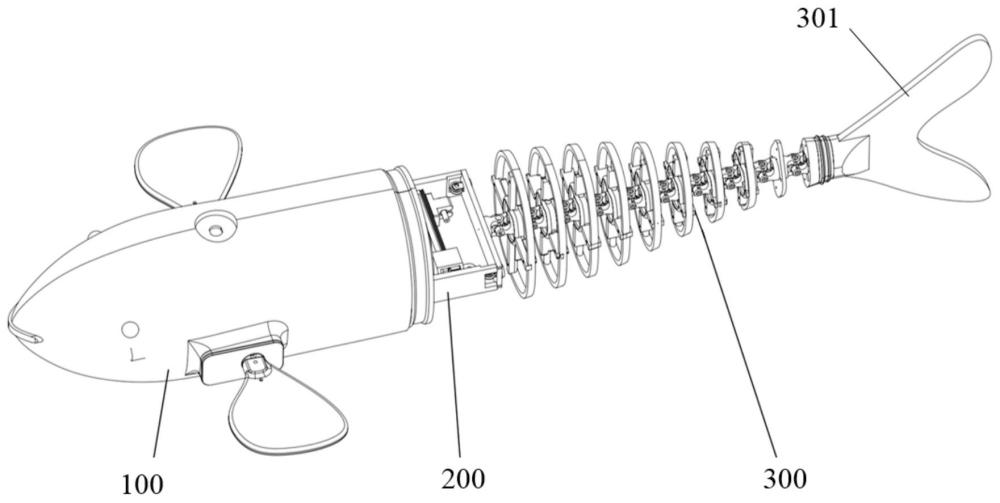
2、根据本发明提供的仿生机器鱼,包括头部舱模块、驱动传动机构模块以及尾关节舱模块;所述驱动传动机构模块与所述头部舱模块连接,所述驱动传动机构模块包括驱动子模块、与所述驱动子模块连接的第一传动子模块和第二传动子模块,所述第一传动子模块位于所述头部舱模块和所述驱动子模块之间,所述第二传动子模块位于所述驱动子模块远离所述头部舱模块的一侧;所述尾关节舱模块与所述驱动传动机构模块连接,所述尾关节舱模块包括尾鳍;其中,所述第一传动子模块通过第一拉线与所述尾鳍连接,所述第二传动子模块通过第二拉线与所述尾鳍连接;当所述驱动子模块沿第一方向转动时,通过所述第一传动子模块和所述第二传动子模块带动所述尾鳍以第一幅值摆动;当所述驱动子模块沿所述第一方向的反方向转动时,通过所述第一传动子模块和所述第二传动子模块带动所述尾鳍以第二幅值摆动,所述第一幅值与所述第二幅值不相等。
3、根据本发明的实施例,所述驱动子模块包括电机定子和电机转子,所述电机定子嵌入所述电机转子中。
4、根据本发明的实施例,所述第一传动子模块包括第一行星减速器、第一旋转盘、第一回转块、第一滑槽、第一固线座、第一滑块以及第一横板;所述第一行星减速器通过第一连接件与所述电机定子连接;所述第一旋转盘与所述第一行星减速器连接,所述第一旋转盘上设置有第一槽口;所述第一回转块与所述第一旋转盘连接;所述第一滑槽与所述第一回转块连接;所述第一固线座位于所述第一滑槽的一端;所述第一滑块位于所述第一滑槽的另一端,所述第一滑块可沿所述第一滑槽滑动,所述第一滑块靠近所述第一旋转盘的一端卡在所述第一槽口内;所述第一横板位于所述第一固线座远离所述第一滑槽的一侧;其中,所述第一固线座面向所述第一滑块的一侧设置有第一调整钉,所述第一滑块面向所述第一横板的一侧设置有第一滚轮,所述第一滑块面向所述第一横板的侧面设置有第一孔,所述第一横板面向所述第一固线座的一侧设置有第二滚轮;所述第一拉线的一端与所述第一调整钉固定连接,所述第一拉线的另一端依次穿过所述第一滚轮、所述第一孔以及所述第二滚轮与所述尾鳍固定连接。
5、根据本发明的实施例,所述第二传动子模块包括第二行星减速器、第二旋转盘、第二回转块、第二滑槽、第二固线座、第二滑块以及第二横板;所述第二行星减速器通过第二连接件与所述电机转子连接;所述第二旋转盘与所述第二行星减速器连接,所述第二旋转盘上设置有第二槽口;所述第二回转块与所述第二旋转盘连接;所述第二滑槽与所述第二回转块连接;所述第二固线座位于所述第二滑槽的一端;所述第二滑块位于所述第二滑槽的另一端,所述第二滑块可沿所述第二滑槽滑动,所述第二滑块靠近所述第二旋转盘的一端卡在所述第二槽口内;所述第二横板位于所述第二固线座远离所述第二滑槽的一侧;其中,所述第二固线座面向所述第二滑块的一侧设置有第二调整钉,所述第二滑块面向所述第二横板的一侧设置有第三滚轮,所述第二滑块面向所述第二横板的侧面设置有第二孔,所述第二横板面向所述第二滑块的一侧设置有第四滚轮,所述第四滚轮与所述第二滚轮关于所述驱动子模块的中心对称设置;所述第二拉线的一端与所述第二调整钉固定连接,所述第二拉线的另一端依次穿过所述第三滚轮、所述第二孔以及所述第四滚轮与所述尾鳍固定连接。
6、根据本发明的实施例,所述第一槽口包括靠近所述第一旋转盘的中间区域的第一端和靠近所述第一旋转盘的边缘区域的第二端,所述第二槽口包括靠近所述第二旋转盘的中间区域的第三端和靠近所述第二旋转盘的边缘区域的第四端;其中,当所述驱动子模块沿第一方向转动时,所述第一滑块滑动至所述第一端,所述第二滑块滑动至所述第三端;当所述驱动子模块沿所述第一方向的反方向转动时,所述第一滑块滑动至所述第二端,所述第二滑块滑动至所述第四端;所述第一幅值小于所述第二幅值。
7、根据本发明的实施例,所述驱动传动机构模块还包括固定座,所述第一传动子模块、所述驱动子模块以及所述第二传动子模块均位于所述固定座内。
8、根据本发明的实施例,所述头部舱模块包括头部壳体、第一胸鳍、第二胸鳍、第一胸鳍盖、第二胸鳍盖、电池模块、第一舵机、第二舵机、第一舵机连轴以及第二舵机连轴;所述第一胸鳍位于所述头部壳体的一侧;所述第二胸鳍位于所述头部壳体的另一侧;所述第一胸鳍盖位于所述头部壳体上靠近所述第一胸鳍的一侧;所述第二胸鳍盖位于所述头部壳体上靠近所述第二胸鳍的一侧;所述电池模块位于所述头部壳体内;所述第一舵机位于所述电池模块靠近所述驱动传动机构模块的一侧,所述第一舵机与所述电池模块电连接;所述第二舵机位于所述电池模块靠近所述驱动传动机构模块的一侧,所述第二舵机与所述电池模块电连接;所述第一舵机连轴的一端与所述第一舵机连接,所述第一舵机连轴的另一端穿过所述第一胸鳍盖与所述第一胸鳍连接;所述第二舵机连轴的一端与所述第二舵机连接,所述第二舵机连轴的另一端穿过所述第二胸鳍盖与所述第二胸鳍连接。
9、根据本发明的实施例,所述固定座靠近所述头部舱模块的一端嵌入所述头部壳体内。
10、根据本发明的实施例,所述尾鳍内设置有压块,所述压块用于固定所述第一拉线和所述第二拉线。
11、根据本发明的实施例,所述尾关节舱模块还包括多个尾节,所述多个尾节位于所述驱动传动机构模块和所述尾鳍之间;其中,所述驱动传动机构模块与所述尾节之间、相邻两个所述尾节之间、所述尾节与所述尾鳍之间均通过连接结构连接,所述连接结构包括两个万向节和一个万向块。
12、本发明的有益效果:本发明实施例提供的仿生机器鱼包括头部舱模块、驱动传动机构模块以及尾关节舱模块;驱动传动机构模块与头部舱模块连接,驱动传动机构模块包括驱动子模块、与驱动子模块连接的第一传动子模块和第二传动子模块,第一传动子模块位于头部舱模块和驱动子模块之间,第二传动子模块位于驱动子模块远离头部舱模块的一侧;尾关节舱模块与驱动传动机构模块连接,尾关节舱模块包括尾鳍;其中,第一传动子模块通过第一拉线与尾鳍连接,第二传动子模块通过第二拉线与尾鳍连接;当驱动子模块沿第一方向转动时,通过第一传动子模块和第二传动子模块带动尾鳍以第一幅值摆动;当驱动子模块沿第一方向的反方向转动时,通过第一传动子模块和第二传动子模块带动尾鳍以第二幅值摆动,第一幅值与第二幅值不相等;本发明通过使驱动子模块连续转动,能实现尾鳍的往复运动;通过使驱动子模块沿第一方向转动或沿第一方向的反方向转动,能实现尾鳍摆动幅值的改变;通过调节驱动子模块的转速,能实现尾鳍摆动频率的改变。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279093.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种船舶航海防撞装置
下一篇
返回列表