一种仿生腕关节及机械臂
- 国知局
- 2024-08-05 12:21:08
本发明涉及仿生机械,特别的涉及一种仿生腕关节及机械臂。
背景技术:
1、在机器人技术中,绳驱动主要应用于并联机构和机器人手爪的传动。绳驱动可以实现远距离传动,有效降低关节的重量,实现机械臂的轻量化,因此对绳驱动机械臂技术的研究越来越受到人们的重视和关注。
2、关节是连接机器人的手、臂、机身、腿和脚不可缺少的部件。大多数关节的运动方式是转动或作短距离平移运动。在各种关节中,又以腕关节的运动最为复杂,自由度最多。在现有绳驱机械臂技术中,腕关节基本都为二自由度,可操作空间有限;因此对于那些需要在空间曲面上进行连续作业,如:用于焊接、喷漆、隧道掘进工程中的砼喷等工作的机器人来说,至少具有三个旋转自由度的腕关节是完全有必要的。
技术实现思路
1、针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种结构紧凑,质量轻,能够模拟腕部的转动动作,灵活性好的仿生腕关节及机械臂。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
3、一种仿生腕关节,其特征在于,包括用于连接手掌的掌基板和用于连接小臂的臂基板,所述掌基板和臂基板相对的一侧均具有3个沿腕关节的周向均布设置的铰支座,所述掌基板上的铰支座与所述臂基板上的铰支座在腕关节的周向上错位设置,所述铰支座上铰接有转接块;所述掌基板和臂基板之间设置有连杆,所述连杆沿腕关节的周向偏转弯折,且两端分别铰接在两个错位设置的铰支座的转接块上,所述转接块两端的铰接轴心呈正交设置;所述臂基板背离所述掌基板的一侧设置有第一拉绳机构和第二拉绳机构,所述掌基板上具有四个沿腕关节的周向均布设置的线控点,所述第一拉绳机构的拉绳两端分别连接在其中两个沿腕关节径向布置的线控点上,所述第二拉绳机构的拉绳两端分别连接在另外两个沿腕关节径向布置的线控点上。
4、上述结构中,由于连杆的两端通过转接块与铰支座铰接相连,而且铰支座两端的铰接轴呈正交设置,同时,掌基板和臂基板上的铰支座在周向上相对错位设置,使得掌基板能够绕任一径向轴转动,即该腕部能够模拟人的手腕在一个平面内进行运动。通过背离掌基板设置的第一拉绳机构和第二拉绳机构分别在两个方向上控制掌基板相对臂基板转动,就能够控制腕关节的灵活转动。
5、进一步的,所述铰支座的旋转轴心线沿3个所述铰支座的外接圆的径向设置。
6、进一步的,所述掌基板上的铰支座与所述臂基板上的铰支座在周向上错位60°。
7、进一步的,所述连杆包括沿腕关节周向偏转设置的扭转部,所述扭转部的两端具有沿腕关节轴向朝相背离方向延伸的铰接部,所述铰接部与所述转接块铰接相连。
8、一种机械臂,其特征在于,包括大臂、小臂和如上所述的仿生腕关节,所述小臂的一端铰接在所述大臂上,另一端连接在所述仿生腕关节的臂基板上。
9、进一步的,所述小臂与所述大臂之间连接通过肘铰轴相连,所述大臂上安装有肘部驱动器,所述肘部驱动器的驱动端与所述小臂相连,使所述小臂可相对所述大臂转动。
10、进一步的,所述小臂包括用于连接大臂的肘臂段和用于连接所述臂基板的腕臂段,所述肘臂段与所述腕臂段之间具有沿小臂长度方向设置的第一臂铰轴,且二者之间设置有第一臂转驱动器,使所述腕臂段可通过所述第一臂铰轴相对所述肘臂段转动。
11、进一步的,所述大臂的上端连接有肩关节,所述肩关节包括横向设置的第一驱动器,所述第一驱动器的驱动端连接有支架,所述大臂的上端通过肩铰轴可转动地安装在所述支架上,所述支架上安装有第二驱动器,所述第二驱动器的驱动端与所述大臂相连,使所述大臂可相对所述支架转动。
12、进一步的,所述大臂包括用于连接肩关节的肩臂段和用于连接小臂的主臂段,所述肩臂段和主臂段之间具有沿大臂长度方向设置的第二臂铰轴,且二者之间设置有第二臂转驱动器,使所述主臂段可通过所述第二臂铰轴相对所述肩臂段转动。
13、综上所述,本发明的仿生腕关节及机械臂均具有结构紧凑,质量轻,灵活性好等优点。
技术特征:1.一种仿生腕关节,其特征在于,包括用于连接手掌的掌基板(1)和用于连接小臂的臂基板(2),所述掌基板(1)和臂基板(2)相对的一侧均具有3个沿腕关节的周向均布设置的铰支座(3),所述掌基板(1)上的铰支座(3)与所述臂基板(2)上的铰支座(3)在腕关节的周向上错位设置,所述铰支座(3)上铰接有转接块(4);所述掌基板(1)和臂基板(2)之间设置有连杆(5),所述连杆(5)沿腕关节的周向偏转弯折,且两端分别铰接在两个错位设置的铰支座(3)的转接块(4)上,所述转接块(4)两端的铰接轴心呈正交设置;所述臂基板(2)背离所述掌基板(1)的一侧设置有第一拉绳机构(6)和第二拉绳机构(7),所述掌基板(1)上具有四个沿腕关节的周向均布设置的线控点,所述第一拉绳机构(6)的拉绳两端分别连接在其中两个沿腕关节径向布置的线控点上,所述第二拉绳机构(7)的拉绳两端分别连接在另外两个沿腕关节径向布置的线控点上。
2.如权利要求1所述的仿生腕关节,其特征在于,所述铰支座(3)的旋转轴心线沿3个所述铰支座(3)的外接圆的径向设置。
3.如权利要求1所述的仿生腕关节,其特征在于,所述掌基板(1)上的铰支座(3)与所述臂基板(2)上的铰支座(3)在周向上错位60°。
4.如权利要求1所述的仿生腕关节,其特征在于,所述连杆(5)包括沿腕关节周向偏转设置的扭转部(51),所述扭转部(51)的两端具有沿腕关节轴向朝相背离方向延伸的铰接部(52),所述铰接部(52)与所述转接块(4)铰接相连。
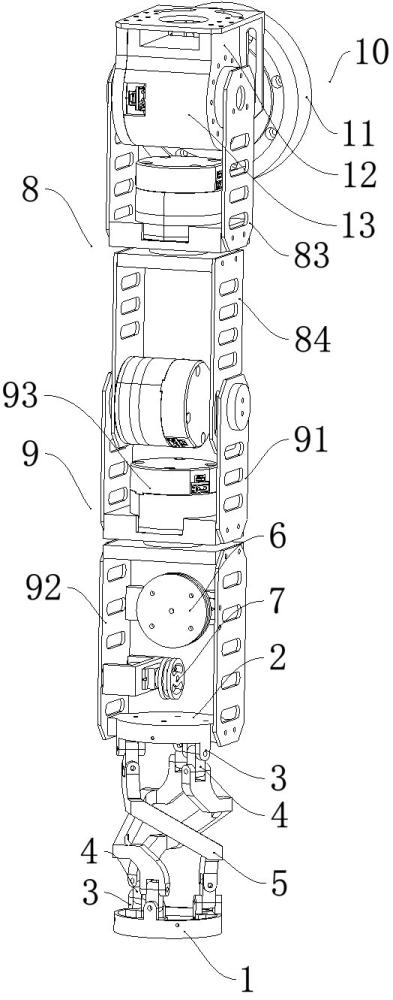
5.一种机械臂,其特征在于,包括大臂(8)、小臂(9)和如权利要求1~4中任一权利要求所述的仿生腕关节,所述小臂(9)的一端铰接在所述大臂(8)上,另一端连接在所述仿生腕关节的臂基板(2)上。
6.如权利要求5所述的机械臂,其特征在于,所述小臂(9)与所述大臂(8)之间连接通过肘铰轴(81)相连,所述大臂(8)上安装有肘部驱动器(82),所述肘部驱动器(82)的驱动端与所述小臂(9)相连,使所述小臂(9)可相对所述大臂(8)转动。
7.如权利要求5所述的机械臂,其特征在于,所述小臂(9)包括用于连接大臂(8)的肘臂段(91)和用于连接所述臂基板(2)的腕臂段(92),所述肘臂段(91)与所述腕臂段(92)之间具有沿小臂长度方向设置的第一臂铰轴,且二者之间设置有第一臂转驱动器(93),使所述腕臂段(92)可通过所述第一臂铰轴相对所述肘臂段(91)转动。
8.如权利要求5所述的机械臂,其特征在于,所述大臂(8)的上端连接有肩关节(10),所述肩关节(10)包括横向设置的第一驱动器(11),所述第一驱动器(11)的驱动端连接有支架(12),所述大臂(8)的上端通过肩铰轴可转动地安装在所述支架(12)上,所述支架(12)上安装有第二驱动器(13),所述第二驱动器(13)的驱动端与所述大臂(8)相连,使所述大臂(8)可相对所述支架(12)转动。
9.如权利要求8所述的机械臂,其特征在于,所述大臂(8)包括用于连接肩关节(10)的肩臂段(83)和用于连接小臂(9)的主臂段(84),所述肩臂段(83)和主臂段(84)之间具有沿大臂长度方向设置的第二臂铰轴,且二者之间设置有第二臂转驱动器(83),使所述主臂段(84)可通过所述第二臂铰轴相对所述肩臂段(83)转动。
技术总结本发明公开了一种仿生腕关节及机械臂,仿生腕关节包括掌基板和臂基板,掌基板和臂基板相对的一侧均具有3个沿腕关节的周向均布设置的铰支座,掌基板上的铰支座与臂基板上的铰支座在腕关节的周向上错位设置,铰支座上铰接有转接块;掌基板和臂基板之间设置有连杆,连杆的两端分别铰接在两个铰支座的转接块上,转接块两端的铰接轴心呈正交设置;臂基板背离掌基板的一侧设置有第一拉绳机构和第二拉绳机构,掌基板上具有四个线控点,第一拉绳机构的拉绳两端分别连接在其中两个沿腕关节径向布置的线控点上,第二拉绳机构的拉绳两端分别连接在另外两个沿腕关节径向布置的线控点上。本发明的仿生腕关节及机械臂均具有结构紧凑,质量轻,灵活性好等优点。技术研发人员:何苗,牟栩荣,宗前,胡方超,刘阳受保护的技术使用者:重庆理工大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/262332.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表