一种储能关节模组及机器人的制作方法
- 国知局
- 2024-08-05 12:20:01
本发明涉及机器人,特别是涉及一种储能关节模组及机器人。
背景技术:
1、在机器人运动领域,机器人运动关节的设计一直是研究的热点和难点。传统的电机输入轴与关节输出机构之间的刚性连接驱动方式,虽然以其结构简洁、紧凑以及定位精度高等特点在机器人制造领域得到了广泛应用,但其缺乏机构柔顺性、难以平衡力矩以及高能耗等问题也日益凸显。
2、针对这些问题,现有技术提出了一些解决方案,如附加平衡电机式、附加配重式以及外置弹簧平衡杠等。然而,这些方案都存在一定的局限性:附加平衡电机式需要增加一倍的电机和控制系统,造成资源浪费;附加配重式虽然成本低,但会增加转动惯量和质量,增大后继臂杆的负载,使电机驱动力矩增大,动力学特性变差;外置弹簧平衡杠则只适用于重载工业机器人,且其笨重的结构和突兀的外形严重影响人机安全性。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种储能关节模组及机器人,其中:储能关节模组通过结构优化,提高了机器人关节的柔顺性和稳定性,有利于平衡机械臂关节处的负载扭矩,降低关节对动力的需求,节能增效,并且对关节外形影响较小,不影响关节外形安全性。
2、为了解决上述技术问题,本发明提供了储能关节模组,包括:
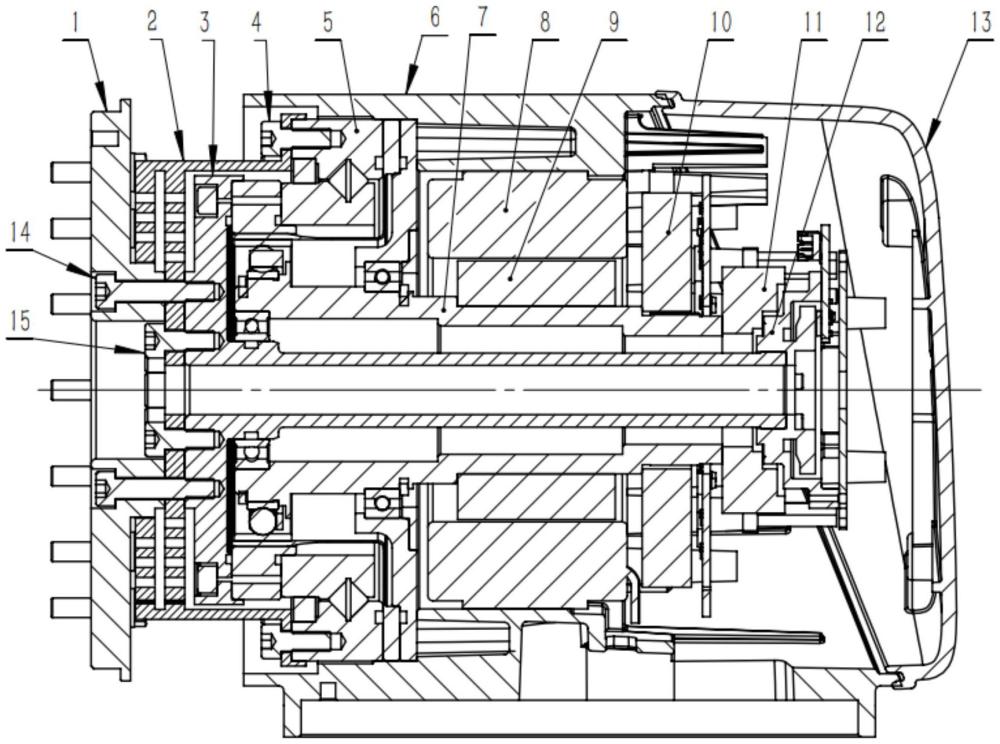
3、关节壳体、输出法兰、储能器、刚轮盖、减速器、电机、制动器、编码器,且所述输出法兰、刚轮盖、储能器、减速器、电机、制动器、编码器沿着电机的轴向方向依次设置;
4、所述电机包括电机轴;所述关节壳体呈筒形,内设多级阶梯通孔;所述电机轴同轴安装在关节壳体的内部,呈中空结构;
5、所述编码器包括输入端编码器和输出端编码器;所述电机轴与输入端编码器连接;所述刚轮盖上的输出轴与输出端编码器连接;
6、所述储能器与所述减速器、刚轮盖、输出法兰通过紧固件固定连接。
7、作为优选方案,所述电机还包括定子、转子;所述转子环绕电机输出轴的轴向设置,所述定子位于转子外侧且与转子相对转动设置。
8、作为优选方案,还包括后盖,固定安装在关节壳体上远离输出法兰的一端。
9、作为优选方案,所述储能器与所述减速器的交叉滚子轴承外轮通过第一紧固件可拆卸连接;所述第一紧固件为平衡点调节紧固件,通过改变储能器零力相对关节零位的位置关系实现储能平衡点的调节,通过拆除平衡点调节紧固件关闭储能功能。
10、作为优选方案,所述储能器、刚轮盖与所述输出法兰通过第二紧固件固定连接。
11、作为优选方案,所述储能器与所述刚轮盖通过第三紧固件固定连接。
12、作为优选方案,所述储能器包括储能元件以及一体化结构的外圈固定面、内圈固定面;所述储能元件设于储能器的端面或圆周面或复合设置于储能器的端面、圆周面。
13、作为优选方案,所述储能元件至少包括盘旋分层次设置的第一储能元件和第二储能元件;所述第一储能元件设于靠近外圈固定面一侧,所述第二储能元件设于远离外圈固定面一侧且第二储能元件上设有第一限位凸台。
14、作为优选方案,所述输出法兰上设有与所述第一限位凸台对应的第二限位凸台。
15、一种机器人,包括多个机械臂及上述的储能关节模组,相邻的所述机械臂之间通过所述储能关节模组传动连接。
16、本发明的有益效果为:
17、(1)本发明提供的储能关节模组可很好平衡机械臂关节处的负载扭矩,能够降低关节对动力的需求,从而可以选用功率较小的电机和扭矩较小的减速器,这不仅有助于减轻机体的重量和体积,降低整体成本,还能显著提升机械臂的运动性能和效率。此外,其中的储能元件还具有节能增效的显著优势。在关节正向运动时,它能够将部分动能转化为势能储存起来,在反向运动时,这些储存的势能又能够被迅速释放并转化为动能,不仅有助于减少能源消耗,还能提高机械臂的运动平稳性和响应速度。与此同时,储能器结构紧凑,体积小、重量轻,内置于关节模组内,对关节外形影响较小、不影响关节外形安全性,没有任何突兀或突出的部分,使得关节模组更加符合轻型工业机器人、协作机器人、仿人机械臂的需求,能够在与人类或其他物体进行交互时保持安全、顺畅的运动;
18、(2)通过设有的平衡点调节紧固件,可通过改变储能器零力相对关节零位的位置关系进而实现储能平衡点的调节,调节简单,不需要拆开机器人或关节、精度不会受影响,快速适应不同安装角度和应用工艺工况,与此同时,通过拆除平衡点调节紧固件即可关闭储能功能,兼容传统关节并便于现场维修维护;
19、(3)储能元件至少包括盘旋分层次设置的第一储能元件和第二储能元件,使得储能元件在受力时能够分级响应,通过多级弹性结构轮流触发的设置,有利于实现关节模组旋转过程中的弹性元件刚度变化以适应复杂的关节受力情况。
技术特征:1.储能关节模组,其特征在于,包括:
2.根据权利要求1所述的储能关节模组,其特征在于,
3.根据权利要求2所述的储能关节模组,其特征在于,
4.根据权利要求2所述的储能关节模组,其特征在于,
5.根据权利要求2所述的储能关节模组,其特征在于,
6.根据权利要求2所述的储能关节模组,其特征在于,
7.根据权利要求2所述的储能关节模组,其特征在于,
8.根据权利要求2所述的储能关节模组,其特征在于,
9.根据权利要求2所述的储能关节模组,其特征在于,
10.一种机器人,其特征在于,
技术总结本发明提供了储能关节模组及机器人,其中储能关节模组,包括:关节壳体、输出法兰、储能器、刚轮盖、减速器、电机、制动器、编码器,且所述输出法兰、储能器、刚轮盖、减速器、电机、制动器、编码器沿着电机轴向方向依次设置,本发明提供的储能关节模组不仅能够降低关节对动力的需求,节能增效,同时储能器结构紧凑,体积小、重量轻,内置于关节模组内,对关节外形影响较小、不影响关节外形安全性,没有任何突兀或突出的部分,使得关节模组更加符合轻型工业机器人、协作机器人、仿人机械臂的需求。技术研发人员:孙恺,高瑜刚,曹宇男受保护的技术使用者:苏州艾利特机器人有限公司技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/262227.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表