一种多功能防腐作业机器人的制作方法
- 国知局
- 2024-08-05 12:08:53
本发明涉及机器人,尤其涉及一种多功能防腐作业机器人。
背景技术:
1、金属腐蚀是指在周围介质的化学或电化学作用下,并且经常是在和物理、机械或生物学因素的共同作用下金属产生的破坏。根据腐蚀过程进行的历程,一般可将金属腐蚀分为两类,即化学腐蚀和电化学腐蚀。对于暴露于空气中的大型金属结构物,如储罐,船舶,风电塔筒等均需要一系列的防腐措施来保证其结构的完整性与可靠性,目前最常用最普遍的防腐措施为覆盖层防腐,即把金属结构通过防腐涂料与外界环境隔离。
2、防腐作业的工艺流程主要为金属表面除锈清理-底漆涂装-中间漆涂装-面漆涂装。在多道漆料的涂装过程中,如果遇到两道漆间隔时间过久或漆面表面有污渍,需要进行拉毛作业,可以对漆面表面进行清洁并增加其粗糙度,增加两道漆料之间的附着力。目前,我国绝大部分的防腐作业均采用人工进行高空作业,由于环保压力,人力短缺等外在条件的制约,急需开发一种多功能防腐作业机器人。
3、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的是提供一种多功能防腐作业机器人,利用永磁吸附技术,能够稳定地吸附于大型立面导磁金属结构的表面,如储罐内外壁,船舶外表面等,并可以灵活移动,配合可调节高度的磁铁模块,可以适用于不同直径的储罐。通过快速接口,可以快速便捷地更换前端作业模块,实现除锈、喷漆和拉毛等多种作业一体化,提高作业效率,应用前景广阔,有利于推广应用。
2、为了实现上述目的,本发明提供的一种多功能防腐作业机器人,包含机器人本体、除锈作业前端、喷漆作业前端、拉毛清洁作业前端、控制系统和辅助系统;所述机器人本体包括两个驱动单元、一个从动单元、一个车架单元、一个前端快速接口和一个前端升降及监控单元;
3、两个驱动单元相互独立,结构相同,呈对称布置,通过螺钉与车架单元连接,通过控制高精度伺服电机为机器人提供动力,使机器人实现灵活移动所述驱动单元包括高精度伺服电机、减速机、连接法兰、轮胎一、轮胎二和支撑轮,所述高精度伺服电机的输出轴与减速机的输入端连接,构成驱动总成,所述轮胎一、轮胎二和支撑轮通过螺钉互相连接,组成车轮总成,所述车轮总成通过支撑轮与减速机连接,连接法兰的一端与减速机通过螺钉固定,另一端通过螺钉固定于车架单元的支撑护板一或支撑护板二上,使驱动单元与车架单元形成一个整体;
4、所述从动单元为万向随动结构,为机器人提供良好的稳定支撑及部分吸附力,所述从动单元包括随动轮侧板一、随动轮侧板二、小磁铁一、小磁铁二、固定螺母一、固定螺母二、随动轮、支撑件、连接轴、交叉滚子轴承、旋转连接件和随动轮轴,所述交叉滚子轴承、旋转连接件和随动轮轴构成万向结构,保证随动轮可以实现万向随动,使用螺钉将小磁铁一和小磁铁二通过连接孔与随动轮侧板一和随动轮侧板二分别进行连接,然后使用连接轴将随动轮侧板一、随动轮侧板二和随动轮依次连接,然后通过固定螺母一、固定螺母二将小磁铁一和小磁铁二固定于连接轴,最后通过支撑件将万向结构与随动轮侧板一、随动轮侧板二连接成一个整体;
5、所述车架单元为机器人提供刚性支撑,所述车架单元包括防护梁、防护梁支撑件、主支撑板、电机仓、支撑护板一、支撑护板二、大磁铁一、大磁铁二、磁铁安装板一、磁铁安装板二、倾角仪、控制盒、再生电阻和吊环,所述电机仓、支撑护板一、支撑护板二和磁铁安装板一为一个焊接的整体,所述支撑护板一和支撑护板二用于固定两个驱动单元二,两者通过连接法兰进行连接,四个磁铁安装板一用于固定大磁铁一和大磁铁二,每一块大磁铁两端有两个磁铁安装板二,所述磁铁安装板一和磁铁安装板二通过螺钉固定,两者之间通过安装垫片来调整磁铁的高度,所述防护梁通过六个防护梁支撑件安装于主支撑板上,为机器人提供防护以及为人工搬抬机器人提供着力点,所述控制盒位于支撑板的后侧,用于放置机器人的各电器元件,所述倾角仪位于支撑板下表面的前端,用于监控机器人的行走角度,所述再生电阻位于支撑板的正下方,所述吊环用于悬挂防坠器;
6、所述前端快速接口安装于快速接口固定板上,包括底板、夹板、转轴杆件、卡套和花型螺母,所述底板和夹板底部通过转轴连接,在安装前端作业模块后,通过将卡套放置于夹板顶部的凹槽中,旋转花型螺母即可锁紧;
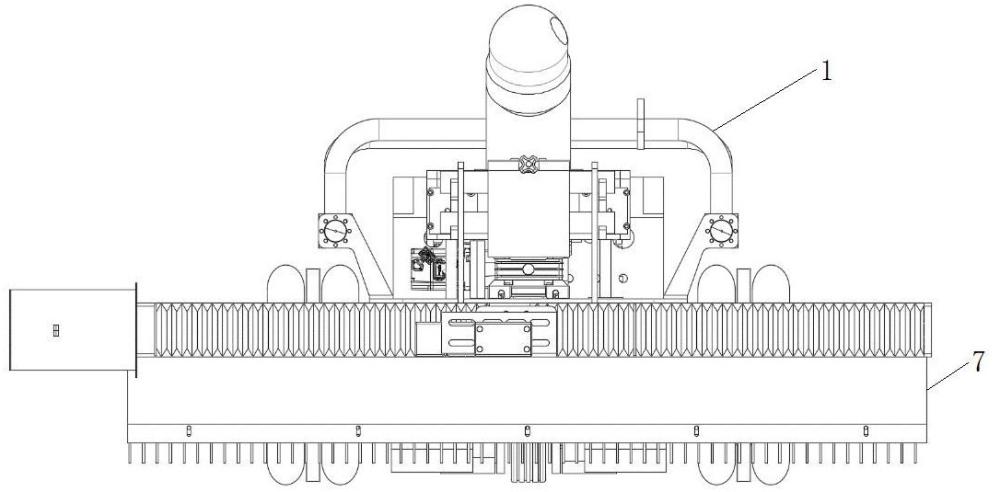
7、所述前端升降及监控单元安装于支撑板的前端,包括伺服电机、蜗轮蜗杆减速机、四个升降轴、四个花键轴套、平板、快速接口固定板、丝杠、限位开关、摄像头底座和云台式摄像头,所述伺服电机和蜗轮蜗杆减速机为前端升降及监控单元的升降提供动力,通过带动丝杠旋转,达到升降的效果,限位开关为升降高度提供保护,所述升降轴和花键轴套为平板和快速接口固定板提供平稳的支撑,所述快速接口固定板通过螺钉与前端快速接口相连接,所述云台式摄像头和摄像头底座安装于平板上,操作人员通过云台式摄像头远程观察作业效果。
8、优选地,所述除锈作业前端用于实现金属表面的除锈作业,包括快速连接件、滑台、电机防护罩及电机、滑台安装块、喷砂枪位置调整件、喷砂枪夹持件和挡板,所述除锈作业前端通过快速连接件与前端快速接口相连,所述电机防护罩及电机安装于滑台的一侧,提供滑台安装块往复运动的动力,所述喷砂枪位置调整件通过螺钉固定于滑台安装块上,用于除锈作业的喷砂枪通过喷砂枪夹持件安装于喷砂枪位置调整件上,根据现场工况选择安装1-2把喷砂枪,并通过喷砂枪位置调整件上的长条孔调整喷砂枪的搭接情况。
9、优选地,所述喷漆作业前端用于实现金属表面的喷漆作业,喷漆作业前端与除锈作业前端共用快速连接件、滑台、电机防护罩及电机和滑台安装块,此外,喷漆作业前端还包括喷枪支架和喷枪安装杆,两个喷枪通过螺钉固定于滑台安装块上,通过喷枪支架上的喷枪支架长条孔调节喷枪高度,通过喷枪安装杆的喷枪安装杆安装孔调节喷枪与机器人之间的距离,所述喷枪安装于喷枪安装杆上,根据现场工况选择安装1-2把喷枪进行喷漆作业,并可调整喷枪之间的距离。
10、优选地,所述拉毛清洁作业前端用于实现漆面表面的拉毛清扫作业,包括气动马达、清洁盘、毛刷、吹扫风刀、连接杆、连接支架和快速连接件,所述气动马达为清洁盘的旋转提供动力,所述清洁盘下安装有毛刷,实现拉毛清洁作业,所述吹扫风刀安装于连接杆上,与现场气源相连,实现吹扫作业。
11、优选地,所述控制系统包括动力或通信线缆、地面控制柜和无线遥控器,所述地面控制柜内包括机器人供电模块、控制机器人运动及动作的驱动装置以及显示操纵模块。
12、优选地,所述辅助系统包括航空箱、防坠器、线缆收纳装置和配套工具。
13、本发明提供的一种多功能防腐作业机器人,具有如下有益效果。
14、1.本发明结构紧凑,体积小,重量轻,操作便捷,可适用于除锈、喷漆、拉毛等多种防腐作业,实现一机多用,集成度高。
15、2.本发明采用模块化设计,可以根据现场作业需求,快速更换不同的作业前端进行作业,极大的缩短了作业准备时间。
16、3.本发明针对防腐作业的多种工况设计了相对应的接口,可快速实现除锈、喷漆、拉毛等不同工序的适配。
17、4.本发明采用在车体下面布置磁铁的方式,并且可以用添加垫片的方式调整磁铁与壁面的距离,进而调整吸附力的大小,可适应多种形状结构的金属壁面作业,如不同直径的储罐以及船头船尾等。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表